e3d TC coupler motor is not moving and homing C has no errors?
-
I'd firstly for ease of use move your M584 to after you drive definitions.
And I can't see any axis limits for the coupler?
Follow my adventures in 3D Printing, laser cutting and electronics. https://linktr.ee/Rushmere3D
-
@voodoobane The normal setup on an e3d toolchanger is not to have any sort of endstop for the C axis. Instead the motor is just driven until it hits the physical stop (the homec.g file will normally reduce the motor current during this process). It looks like you have a stall detection endstop defined. Perhaps that is causing problems. DC42 published his toolchanger configuration here: https://github.com/Duet3D/RRF-machine-config-files/tree/master/E3D_Tool_Changer/dc42-duet3-centreZero-2Titan-2Hemera/sys
I have something very similar setup on my TC and it seems to work fine...
-
Stall detection does not work for the coupler stepper.
Here are the relevant bits from my code:
; from config.g file ; C (tool coupler) (M92 is set so G1 commands are in degrees) M92 C182.044 ; ( 32 steps-per-rev (stepper) * 64 (gearbox) * 2 (gears) * 16 (microsteps) ) / 360 M203 C5000 ; max speed (mm/min) (default 300) (suggested 5000) M201 C500 ; acceleration (mm/s^2) (default 20) (suggested 500) M566 C2 ; max instant speed change (jerk) (mm/min) (default 12) (suggested 2) M906 C500 ; motor current (mA) (stepper rating 400mA RMS per phase) (suggested 500) M350 C16 I1 ; 16x microstepping with interpolation M208 C-41:225 ; set axis min/max values (determined by testing); --- homeC.g --- ; --- compute max C rotation --- var cmin = move.axes[3].min var cmax = move.axes[3].max var ctot = {var.cmax} - {var.cmin} ; --- home C --- M400 ; wait for any moves to finish M913 C50 ; insure "normal" stepper current G91 ; relative moves G1 H2 C{-var.ctot} F5000 ; turn CCW to limit of rotation G92 C-41 ; set logical position (determined by testing so unlocked is 90, locked is 180) M98 P"tool_unlock.g" ; turns to 90; --- tool_lock.g --- M400 ; wait for moves to finish M913 C100 ; increase current to improve locking G90 ; absolute moves G1 C180 F5000 ; turn to locked position M400 ; wait for moves to finish M913 C50 ; restore current to normal; --- tool_unlock.g --- M400 ; wait for moves to finish M913 C100 ; increase current to improve unlocking G90 ; absolute moves G1 C90 F5000 ; turn to unlocked position M400 ; wait for moves to finish M913 C50 ; restore current to normalFrederick
-
I agree with Rushmere3d, you need to add some limits for C.
I have 0 and 500 on mine.
; Axis Limits NEED CHANGING FOR TC. CONSERVATIVE GUESS NOW for XY M208 X-14 Y0 Z0 C0 S1 ; set axis minima M208 X330 Y265 Z350 C500 S0And this is my home C file:
; homec.g ; called to home the C axis (coupler) ; ;G91 M400 G92 C499 M400 M913 C60 ; MOTOR TO 60% CURRENT G1 H1 C0 F2000 ; M400 G92 C0 ;G90 M913 C100 ; MOTOR TO 100% CURRENT G1 C0 F10000 ;Open Coupler M98 P"/macros/Coupler - Unlock"I have the lock position as C33 and unlock as C125
-
I will try this guys!
-
All I see is the homeC.
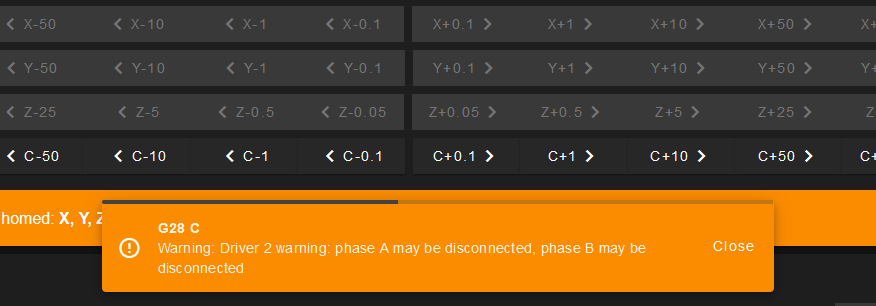
But no I have another problemIs it normal if this isn't all set to have the Home C tell me the wiring is wrong? I have a 2nd motor just in case. and it gives me the same error. I double-checked my wiring and everything. I do not understand it is saying my wiring is bad. could s0 and s1 be a factor? I have little information about this tool changer motor.
-
@voodoobane I checked the A and B poles and they are correct.
-
@voodoobane said in e3d TC coupler motor is not moving and homing C has no errors?:
Is it normal if this isn't all set to have the Home C tell me the wiring is wrong?
What message are you seeing, and what firmware version are you using?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 I using Version 3.4
-
@dc42 I figured it out... Driver 2 is bad...
-
How did you determine that?