Periodicity of ringing
-
I printed out that twisting test piece on the Kossel XL and downstream of the corners I get expected ringing with a wavelength of around 1mm. But I also notice on each side a similar pattern but with a wavelength of around 5mm. It looks like it has the same amplitude on all four sides and amplitude doesn't appear to alter with the twist. The part was printed with 3 walls and no infill.
-
@burtoogle said in Periodicity of ringing:
I printed out that twisting test piece on the Kossel XL and downstream of the corners I get expected ringing with a wavelength of around 1mm. But I also notice on each side a similar pattern but with a wavelength of around 5mm. It looks like it has the same amplitude on all four sides and amplitude doesn't appear to alter with the twist. The part was printed with 3 walls and no infill.
Can you post a photo? Are you sure that the 5mm pattern isn't infill showing through, if you used infill?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@burtoogle Could the additional 5mm pattern coincide with an oscillation from a travel move?
-
@dc42 I cut the print up and put it under a microscope to measure - I counted as many waves as I could in each speed acceleration combo then divided the total distance by the wave count to get the wavelength:
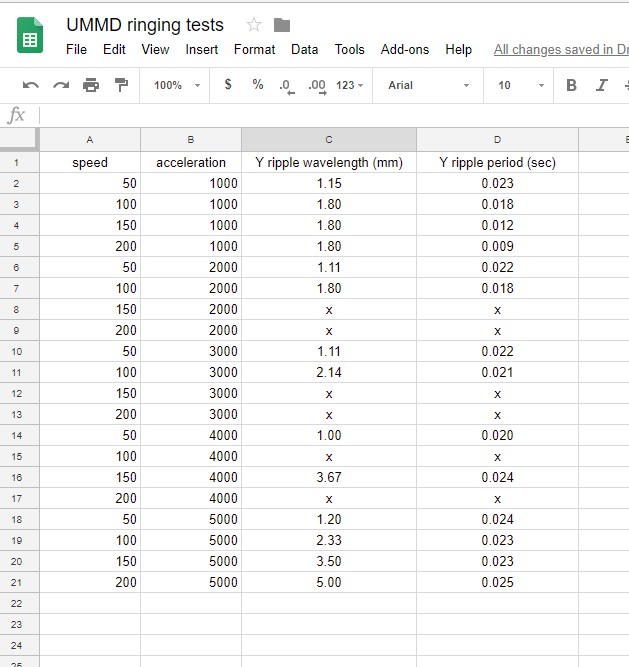
the "x" entries are where the amplitude was so small or the duration so short I couldn't measure it - i.e. not really a print quality issue.
The X axis values were generally high frequency, and very short lived, very small amplitude and I couldn't get any useful/reliable numbers from them.
It's interesting that the period values mostly tend to cluster around 0.02 sec. Something is resonating at about 50 Hz...
-
A pair of lead acid car batteries would be good for 45Ah which would do 1.2kW for an hour. I expect most printers draw less than this,especially when prewarmed. 27.6V maybe an issue though.
If you were planning to do this regularly then deep cycle batteries would be needed. I'm just thinking about a perfect ripple free 24VDC source for a test as I suspect if you look at any switch mode power supply (especially cheaper ones) on the oscilliscope you'll see a 50Hz wobble if you look close enough, but it may not be an issue.
-
Just checked. Duet 2 limited to 25VDC input. May find the car batteries dip under this on load, but as our heaters can be PID the the load cand drop to low levels which may let the voltage go over. You'd need a DC-DV regulator I think.
Running 3 P3Steel with Duet 2. Duet 3 on the shelf looking for a suitable machine. One first generation Duet in a Logo/Turtle style robot!
-
Can you post a photo? Are you sure that the 5mm pattern isn't infill showing through, if you used infill?

Photo just about shows both 1mm and 5mm pitch patterns - printed with 3 walls and no infill.
-
@mrehorstdmd said in Periodicity of ringing:
I cut the print up and put it under a microscope to measure - I counted as many waves as I could in each speed acceleration combo then divided the total distance by the wave count to get the wavelength:
Try adding a column to your table for acceleration time, calculated as (speed - jerk)/acceleration. You should find that the 'x' columns in your table correspond to the acceleration time being close to a multiple of the ripple period.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
for testing, someone who uses 12 V and have this 50 Hz pattern could test this easier with a 12 V car battery. Maybe someone has this constellation.
If it has influence, you don't need to base it solely to a DC source. You can e. g. use some flywheel solution between AC source and your DC target, without storing the energy, just to transform and straighten.
-
@joergs5 said in Periodicity of ringing:
for testing, someone who uses 12 V and have this 50 Hz pattern could test this easier with a 12 V car battery. Maybe someone has this constellation.
If it has influence, you don't need to base it solely to a DC source.
Doh! Ha ha, yes of course! Was thinking too much on how I could access if a ripple on the DC is a problem before doubling the PSU budget!
-
@dc42 ummm, not so much... multiple, yes, but not necessarily whole number multiple.

Maybe my measurements of the ripple aren't so great. I made a couple new test prints that are easier to read:

The one on the left tests individual motors in the corexy mechanism. The ringing looks identical on all sides of that print, as one would expect since the moving mass is the same and the motors and currents are the same. A couple settings generate some ripple effects at the end of motion.
The other print will be easier to measure than my original because it is warped. I used 3 perimeters and the ringing in each perimeter layer reinforces the ringing in the next perimeter, so even the ringing wavelengths I couldn't read before look like they are now readable.
These prints are 50 mm on a side, so at acceleration =1000 they only hit 200 mm/sec for a few mm at the center of the side.
I will measure and create a new spreadsheet...
-
@phaedrux said in Periodicity of ringing:
@burtoogle Could the additional 5mm pattern coincide with an oscillation from a travel move?
My theory is that it is the delta's frame wobbling and so I taped a 2-axis accelerometer to the top of the delta frame and captured some spectra while twatting the top of the frame and, lo and behold, there is a nice resonance peak at around 7.5 Hz which equates to 5.33 mm wavelength, pretty much spot on.
So my next move is to put a load of mass on the top of the delta frame to push the resonant frequency down and see what effect that has. Stay tuned (haha)
-
Adding 3Kg (bag of Oats!) to the top of the delta frame reduced the resonant frequency to 4.66 Hz. Now to print something and check whether the wavelength has increased as expected and see if the amplitude has changed at all.
-
I printed exactly the same twisted test piece gcode - this time with the 3Kg mass on top of the delta frame and as far as I can tell it has completely eradicated the low frequency ringing. I can't see it no matter how I hold the part under the light and I can't feel it when I run my finger over the part. The 5mm wavelength ringing on the earlier part is easy to feel by comparison. Obviously, this is only a test with one part but I think it warrants further investigation.
-
@burtoogle that's interesting. I've been thinking a lot about how best to dampen the frame resonances. Currently I have the frame sitting on some closed cell foam pads on top of an end table. But maybe adding some more mass to the whole frame and table combination would help deaden the vibrations better.
Generally I thought that as long as the bed and print head are moving together the effect of the frame swaying would be basically canceled out but that doesn't really take the elasticity of the belts into consideration. The print head would oscillate longer than the frame I think.
-
@phaedrux said in Periodicity of ringing:
Generally I thought that as long as the bed and print head are moving together the effect of the frame swaying would be basically canceled out but that doesn't really take the elasticity of the belts into consideration. The print head would oscillate longer than the frame I think.
The way I am imagining it is that the whole frame (uprights and the corners they sit in) is flexing. You only have to tap the thing at the top to see it wobble from side to side. So if the frame flexes, the carriages will move with the flex relative to be print bed. Adding mass to the top of the frame appears to have damped the oscillation for one test piece printed at a particular speed. I guess that as long as the resonant frequency of the frame is avoided it could be quite effective. Tomorrow I shall print some parts that previously have shown that low frequency ringing and see if they are now free of it.
-
@phaedrux some CNC people fight resonances by filling half of the extrusion with heavy small particles (I take sandblasting media). Half because the particles must be able to move and kill the energy of the resonance.
For 3D printers I would fill only the parts which are not moving (outer frame e.g.) -
@dc42 said in Periodicity of ringing:
I've done a lot of thinking about the pros and cons of S-curve acceleration recently. I've come to the conclusion that a lot depends on the frequency of ringing that is causing the problem. So I'd like to solicit data from users who are having issues with ringing. Please measure the period of the ringing in mm, divide by the print speed at that point expressed in mm/sec, and report the resulting ringing period in seconds here. Also please report what XY acceleration you are using.
Question about what you're calling the "period of the ringing". You say to measure the period in mm (so the wavelength) and divide by the print speed, however, the speed is ramping up due to the acceleration. I'm not sure what you're after here.
I made more measurements of the X and Y parallel sides ringing, and the A/B ringing. The X parallel sides ringing was so low in amplitude that I couldn't reliably read it for most speed/acceleration settings. Jerk was 1000 mm/min = 16.67 mm/sec.



-
Question about what you're calling the "period of the ringing". You say to measure the period in mm (so the wavelength) and divide by the print speed, however, the speed is ramping up due to the acceleration. I'm not sure what you're after here.
Ignore the start of the ringing close to the corner, because the print head is accelerating there. Measure the wavelength a few mm form the corner, where the constant-speed phase will have started.
Looking at the rows in the Y ringing table where you put 'x' in the wavelength column because the ringing wasn't measurable, the acceleration times in milliseconds are:
67, 92, 44, 61, 21, 46
These are mostly close to multiples of 24ms, the ringing period that you measured.
What jerk setting are you using? Large values of jerk are likely to affect the degree to which ringing is cancelled by making acceleration time a multiple of the ringing period.
-
@burtoogle said in Periodicity of ringing:
Tomorrow I shall print some parts that previously have shown that low frequency ringing and see if they are now free of it.
I printed a part that normally shows the low frequency ringing with weight added to the top of the delta frame and the result is definitely improved. The wavelength of the ringing has increased and the amplitude has reduced so that it's now hard to see or feel the bumps. This photo just about shows the difference:

Still plenty of the high frequency ringing (hoping that David's new firmware additions may help with that).