weird signal from duet to motor
-
@t3p3tony
so when we asked for the motor specs it was revealed it is a servo with an internal driver that reads a stepper driver input. in the instructional video they plug it into a duet the same way, so it comes back to the weird signal from the board.looking back at the scope it doesn't look like noise per say, but more like signals combineing/ cutting out at weird times.
-
Do they also provide settings for the Duet?
-
@payton please post the data sheet.
-
@phaedrux so I think I have solved the problem
I looked at the motor config recommendations, and found that we had interpolation on for the M350 command. I turned it off and I could spin the motor at 13000 with the full 8.25 expected rotations.
now I want to verify I am understanding the problem fully and why this worked. because the duex still works and still has interpolation on. how could this be?
-
@t3p3tony said in weird signal from duet to motor:
@payton please post the data sheet.
-
@t3p3tony I am having trouble finding the datasheet, it is a different company that makes it so it may not be available.
-
I'm using a 6HC with Tecnik Clearpath SDSK stepper/servos and ended up tapping the step and direction signals from test points on the backside of the 6HC and running them through a Duet2 BoB to get them to the 5V levels inputs the Clearpath wants. It was a bunch of tedious hand work but the result has been rock solid. I agree with T3P3Tony that tapping one end of each motor coil is a weird setup.
Chris
Cosentino Engineering -
@t3p3tony Thank you for all your help, I do not think I can get the datasheet, if I ever do I will post it here.
to summarize the problem and solution for future readers:
I had an extruder motor for the printers at work that did not spin the correct amount at high speeds on all printers but one. it was a servo that took stepper motor signals from the servo pins to command the driver. it needs a full step signal to work.
although in the config we had turned micro stepping to full step, we had interpolation on, witch does a minor bit of micro stepping even if that motor is set to full step. the reason the one printer did not have this issue was because it was the only one running with the duet 2, which does not support interpolation unless the drive is set to x16 micro stepping. so with the same config it would run the motor properly
thanks for all the help everyone
-
 undefined Payton has marked this topic as solved
undefined Payton has marked this topic as solved
-
@payton thanks for the explanation. I am still intrigued to see this method of driving a servo from the full step output of a stepper driver.
-
@coseng I am using a 6HC with duet 3 Expansion 1XD board for step and direction connected with the Can Connectors. Originally to steppers but now to (2) ClearPath SD driving the X axis. When the motors are running at high speeds, they will appear to loose steps. Could you give more detail on how you are getting your step and direction signals? I saw other posts have had this issue but I haven't found anyone with a solution.
-
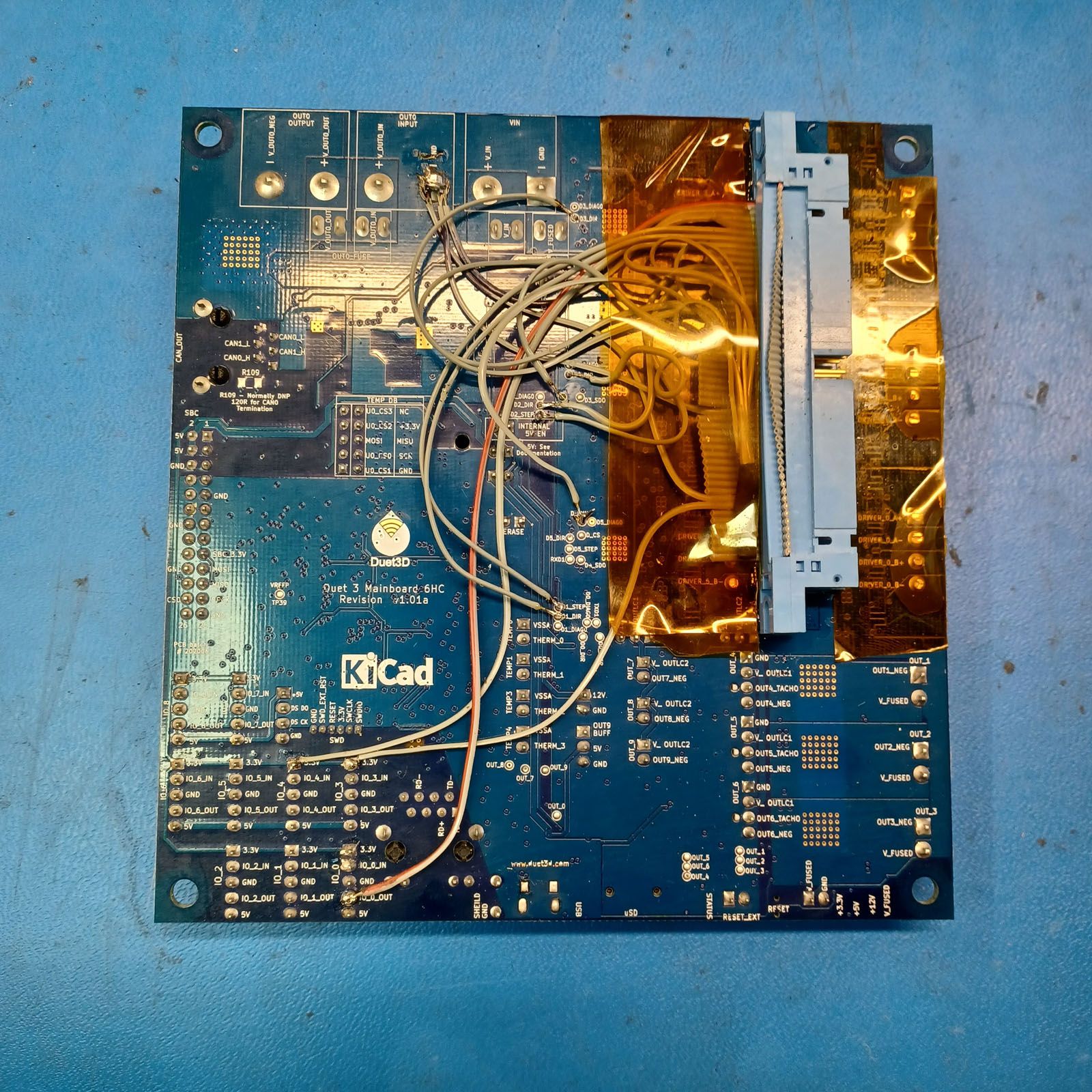
@signpostman I was a little leery about trying to run all of my SDSK motors on the CANBUS because of concerns about max bus throughput/latency and high speed step loss, so I hand wired a step and direction output from the 6HC's backside test points. Because these signals are at 3.3V, they had to be jumped up to 5V, so instead of making my own breadboard level shifter, I used Duet's EBOB (used for Duet 2's) as a level shifter. My printer build thread (https://forum.duet3d.com/topic/22858/new-heated-enclosure-printer) has all the details needed and the tech help was provided by a couple of moderators, so though the soldering will void your warranty, it is an 'official' hack. FYI, Duet3D is coming out with a 6XD that has S+D outputs. Not sure of the timeline.
What I did was to tap into the 6HC's step and direction test points on the back of the board: https://forum.duet3d.com/post/231335, ran these to a ribbon cable connector glued to the back of the board, that then plugged in to the EBOB's 50 pin connector. The modifications to the EBOB are at https://forum.duet3d.com/post/279132, including some rewiring of the clearpath signal connector to get the (3) +5VDC lines to each motor. The mods to the back of the 6HC are shown at: https://forum.duet3d.com/assets/uploads/files/1649284036942-6hc-ext-stepper-mod.jpg.
All the wiring was correct but I needed to tweak the stepper timing signals using a M569 T2 line in the config file.
With a CoreXY setup and complete overkill CPM-SDSK-3421S-ELN motors, I have been able to run at 2000mm/sec rapid speeds with no step loss or any other weirdness. The SDSK motors are super quiet. Print speeds are around 200mm/sec with a 0.8mm nozzle with rapids limited to 600mm/sec. Above that speed the top bellows starts to behave erratically.
I've done about 400hrs of printing so far with no issues, so it seems to be a reliable solution.
Once you get them working, I think you will be very happy with their performance. I had Tom Tullar tom_tullar@teknic.com help me with some remote online servo parameter tuning, which gave a decent improvement (less noise, reduced follower error) over the default settings.
Hope this helps!
Chris
Cosentino Engineering -
@coseng said in weird signal from duet to motor:
Duet3D is coming out with a 6XD that has S+D outputs. Not sure of the timeline.
The first production 6XD boards are being shipped to resellers this week.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 Any Idea when they would be available in the USA?
-
@coseng Thanks for all the info, may dig in it next week
-
@signpostman Here it is! New restock on dhm-online.com
Come and find your duet 3 new products: duet 3 6xd and more https://www.dhm-online.com/brand/14-duet3d
For USA shipment contact us
-
 undefined dc42 referenced this topic
undefined dc42 referenced this topic
{kind=link}