Large Format CoreXY?
-
@michaelr123 If you rotate the profile by 90° you will start having issues on the Z axis. If you want something really right, just replace the profile with a beefier one. With minimal changes, the 4040 should be significantly less susceptible to bending. Or, even simpler, attach another 4020 or 20*20 profile to your existing one. As you have nothing running on the lateral slots, just drill 5.5mm holes in through the center of the extra profile, larger through the V-slot so that the screw head will pass through, and secure the extra profile with slot nuts to the existing profile.
For a 1m profile use 5 or 6 screws evenly distributed over its length. Minimal effort for a significant rigidity gain.
You could stick to 3D printed brackets for now, but go for something like PETG and make them a lot thicker. It also helps to design them with guides fort the rails to slide in, so you get the required 90° in the corners a lot easier.
For the stepper metal plates, you should be able to find shops that provide laser cut Aluminium or steel plates. 6-8mm aluminum or 4-6mm stainless should do the job a lot better than the plastic ones. Thicker plates are needed only for milling CNCs. Those companies usually need just a DXF or a technical drawing of the plate.
-
@michaelr123 To add to the excellent advice given by @Catalin_RO, I would highly recommend using aluminium motor mounts rather than plastic ones. I started out with printed mounts but despite the fact that they were thick and printed in PET-G, the combination of heat from the motors and belt tension would cause them to distort after big multi hour prints. Adding heat sinks and fans to the motors did not cure the problem (large printers require high current motors). Replacing the motor mounts with aluminium ones, meant that not only did they not distort, but any heat from the motors gets transferred through the mount into the frame which acts as a giant heat sink. The net result was that the motors barely get above ambient temperature without using any external cooling. There is also a school of thought that it is possible for static electricity to build up in the belts which could discarge through the motor and ultimately damage the motor and/or driver. A metal mount will provide an earth path (providing the frame is grounded) which a plastic mount will not do.
-
@deckingman From the picture, the printer we are discussing about has moving steppers. So the heat dissipation would happen only if the metallic plates would be quite massive. A simple solution would be to have the Y axes steppers fixed in the rear or the profiles and the belt looped over a pulley or a large idle wheel in the front. That simplifies cabling, hugely improves steppers cooling and reduces the gantry weight.
As for static electricity breaking the steppers, never! While static electricity may cause you small shocks, due to the relatively high voltage, the current is almost impossible to measure due to its very low value and too short time. The stepper coils are designed to handle relatively high currents when compared to the current in a static discharge.
But the high voltage in a static discharge is a guarantee for "success" when we consider the stepper driver. While it may not break the driver, it may briefly (or permanently, but then you blame the driver for breaking the stepper!) open all the semiconductor junctions in it, practically getting a large current into the stepper, with no current limiting logic. That may break the stepper! But I never saw that happening!
Static electricity buildup requires a multitude of conditions to be met simultaneously. I don't see how those could be met in a 3D printer supplied, usually, with 24V, unless we are discussing of a large amount of hot air moving inside the printer so that it would get really dry. Normal air humidity reduces the chance of static electricity buildup.
And even with Aluminum plates, there is no proper electric connection between the elements, at least not while using the V-slot wheels. Even with other solutions of linear bearings there is no guarantee as the V-slot profiles are usually anodized, so they have a non-conductive protective layer.
-
@catalin_ro Ref the moving motors, I haven't read this entire thread -simply the title which is "Large format corexy". The discussion must have moved away from the title if the motors are now going to be moving.
Ref the static, I tend to agree. The school of thought I mentioned is that the interaction between belt and pulley can act as a Van de Graff generator. It is certainly a known phenomenon with conveyor systems, but unlikely to be a problem with 3D printers where the belt speed and direction are constantly changing. However, if grounding the motor body is simple and easy to do, to then it does no harm. -
This post is deleted! -
Thanks for all the feedback!
I decided to go through and design a much more robust belt tensioning system. This has dramatically improved performance. I can tell just from the few test runs I've gotten out of it. Unfortunately I haven't been able to keep the duet connected to the SBC for more than a few minutes though, so every print is failing fairly quickly (see my other thread if you'd like to help me out with a software problem now
 )
)Taking this a new direction, I've really struggled with the web interface to the duet 3 board specifically being flakey. My duet 2 wifi runs like a champ all the time, keeps running if I lose connection to it for some reason, no issues at all. The only issue I have is if it gets a new IP address assigned to it and I have to figure out what the new number is. Any advice on how to improve the robustness of the connection to the SBC and duet 3 combo? Can it store and run print files locally so that if I drop internet connection it can keep running? Does it sound like my PI 3 is flakey and I should replace it?
-
@michaelr123 said in Large Format CoreXY?:
I've really struggled with the web interface to the duet 3 board specifically being flakey. My duet 2 wifi runs like a champ all the time, keeps running if I lose connection to it for some reason, no issues at all. The only issue I have is if it gets a new IP address assigned to it and I have to figure out what the new number is. Any advice on how to improve the robustness of the connection to the SBC and duet 3 combo? Can it store and run print files locally so that if I drop internet connection it can keep running? Does it sound like my PI 3 is flakey and I should replace it?
I suggest you start a new thread and provide as much details about your setup as possible.
-
@catalin_ro I was building a VDG a few years ago and decided to ignore the "conventional wisdom" that you can't use bicycle tire tubes for the belt because the carbon in the tubes makes them conductive enough that you can't generate a charge with them. For once the "conventional wisdom" was right. Zero output.
I suspect that the same effect will apply to the black belts used in printers. If you're using polyurethane belts, it might be different, but the steel core in those belts would probably limit any charge you could accumulate.
@michaelr123 You should be able to reserve a specific IP address for the duet or SBC in your wifi router. Look in advanced settings and see if there's something called "DHCP server". If you enable it you can enter the MAC address of the device and assign a reserved IP address so it will always be assigned that address.
-
@catalin_ro we are fairly certain that static build up on the hot end assembly has damaged the temperature reading electronics in a few instances. That is why we strongly recommend that the hot end metalwork be grounded. We believe it is the act of extruding plastic that causes the static buildup.
We don't have definite evidence that static buildup on axis motors has caused problems, but we think that grounding the motor bodies is a wise precaution.
-
See thread --- Warning: Lost connection to Duet if you've got any ideas on how to get my printer to make it past the first layer.
-
HevORT can be made 800x800mm and possibly larger, but with a setup like this, you lose the most important advantage of a CoreXY system - speed, because your' gantry will be very heavy (you can use servos like Clearpath and 12mm belt though). Also, the Bed will get very, very heavy, so you'd probably need to drive your Z-axis motors with belts and also you'd need to use Nema23 for that. Not enough detent torque on even 60mm Nema17's.
Furthermore - ball screws are out of the question, you'd need to go with regular trapezoids. -
@ov_darkness said in Large Format CoreXY?:
Furthermore - ball screws are out of the question,
Why that? Just out off curiosity...
-
@deckingman said in Large Format CoreXY?:
I started out with printed mounts but despite the fact that they were thick and printed in PET-G, the combination of heat from the motors and belt tension would cause them to distort after big multi hour prints.
I concur and am able to add further evidence...
-
@o_lampe ball screws are not self-braking. So when you have a substantial weight (10mm slab of aluminum 800x800mm in size weighs ~17kg and 800x800x4mm Robax sheet weighs about 6,5kg) on it, they will drop when motors are not energized. Therefore, you'd need trapezoidal screws (they hold large weights much better), motors with brakes, more than three motors (over constraining your bed), or you'd need to move XY gantry in Z axis instead of your bed (so you're basically building a Voron).
in my opinion, using trapezoidal screws is the simplest, most efficient way to solve this problem.
This comes from a person that's operating, servicing, and training people to use 600x600mm bed printers. -
Or use a motor with a worm gear to drive the ball screws, or to drive belts to lift the bed. Either way, the bed won't move when you power down. It's cheaper, simpler, and more reliable than motors with brakes or other add-on gizmos, looks a lot better and takes up less space than counterweights.
https://www.ebay.com/itm/191714031261?epid=711126295&hash=item2ca30bf69d:g:A7UAAOSwPhdVB2f0
I used this gearbox in my corexy machine to lift the bed with belts. It doesn't require any special configuration, or any extra connections to the controller to operate a brake. Just connect it as a Z axis motor and you're done. With 3D printer loads, the 30:1 drive can't be back driven. The NEMA-23 motor provides plenty of torque to lift a heavy bed assembly.
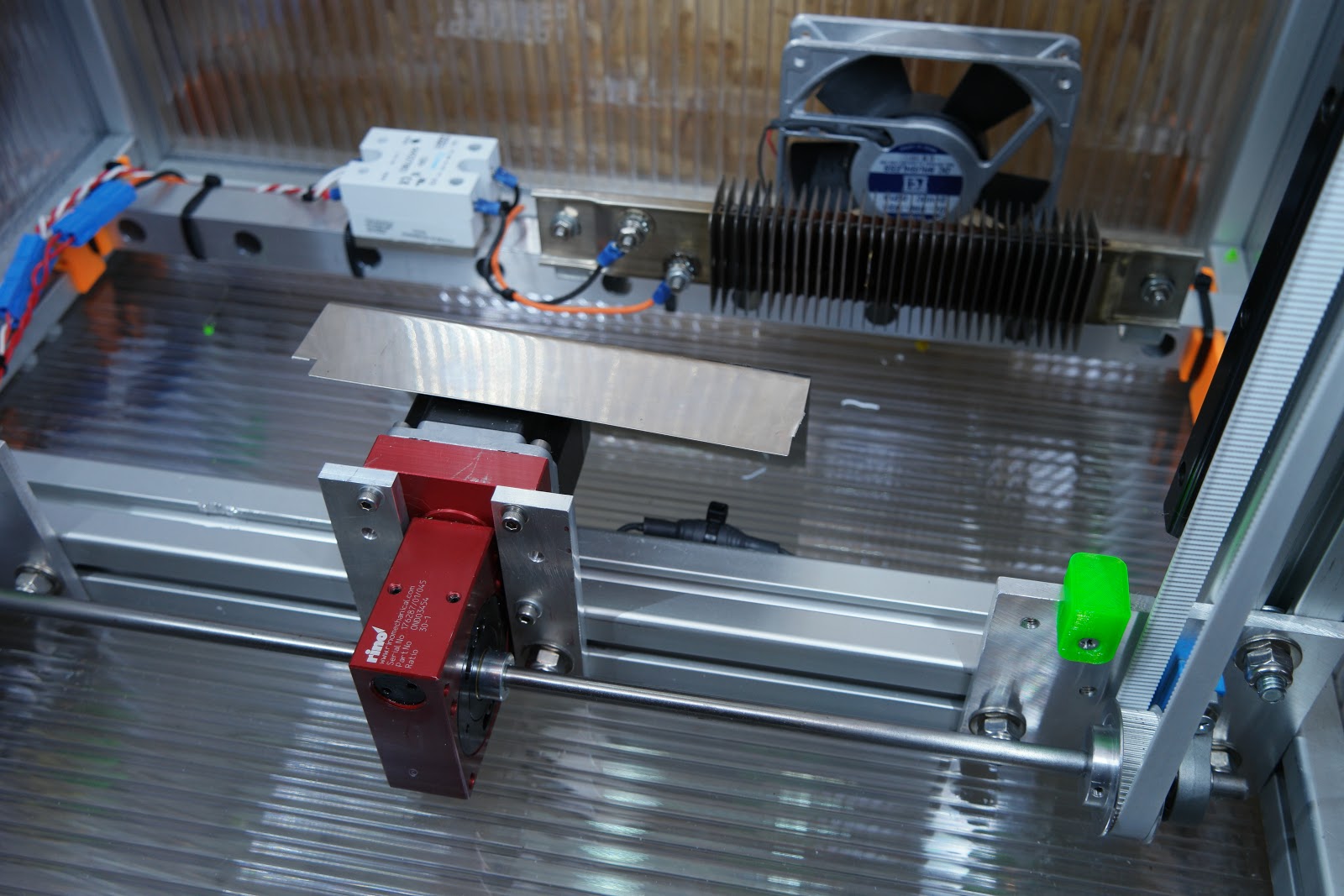
In that picture I was using steel core belts, but have since switched to glass core. Belt stretch is negligible.
-
@mrehorstdmd
I'd give you two ThumbsUp for mentioning wormgear and counterweight.@ov_darkness
Cudos for taking bad design to improve something by misusing trapezoidials and an overcontrained bedframe.
But in the end you'd pay for it with needing several huge stepper motors to overcome the extra friction, adding wear to the leadscrews and the bed gantry. -
@mrehorstdmd said in Large Format CoreXY?:
With 3D printer loads, the 30:1 drive can't be back driven.
This interesting gear will probably have no backlash even without load, because the
is probably the antibacklash mechanism of

This is high quality and worth its high price IMO.
-
Interesting, yeah its a 1m stick of 40x20, but I oriented the 40x20 long side up to help reduce sag from gravity. Sounds like I could benefit from it being oriented the other way to help reduce flex under belt tension. I'm going to stick with V-slot just for ease of use. At the end of the day its running a 1mm nozzle or larger, so I'm not looking for ultra precision.
-
@joergs5 The adjustment on the Rino slightly repositions the disc gear with respect to the worm gear to minimize backlash in the gears. This is the catalog page on the gearbox without the motor. It's the low backlash version which specs at <=8 msec of arc. In this application, backlash shouldn't matter as the load of the printbed mass will always keep the gears engaged on the same side of the teeth regardless of direction of motion. I think you mostly have to worry about backlash if the vertical load is very low mass or in a horizontal motion application where gravity isn't going to help prevent it.
The new price on that gearbox is about $700 without the motor. The ebay part is a real bargain at $108 including the motor, ready to drop in. That's about what it would cost to buy a NEMA-23 motor with a brake.
-
I build alot of large corexy's.
To go big and keep relative "good" speeds - Going to recommend a few things:
Bigger belts - 9 or 12mm, allows for higher tension and allows for greater accelerations with a heavier mass, since they are stiffer due to size.
Metal - Frankly, metal is an important change. A plastic mount that was ok on a smaller machine may be insufficient on a larger one, particularily with higher tension from bigger belts.
Dual shear - Cantilevered Idlers allow for way too much flex. if your design uses them, don't. I support my motor shafts with an additional bearing and this allows me to tension belts well, and print fast.
Don't be afraid to upscale your Z rods or go with belted Z. Eventually it doesn't make sense to lift a thick bed (and they need to be thicker to not bend under their own mass) so there's a sane point where you park the bed.
But honestly, might just be time to change to dual Y motors with 9-12mm belts and then an X motor that travels along with it.