Multiple motion system
-
@gloomyandy Okay, I will wait for the release then. Thank you
-
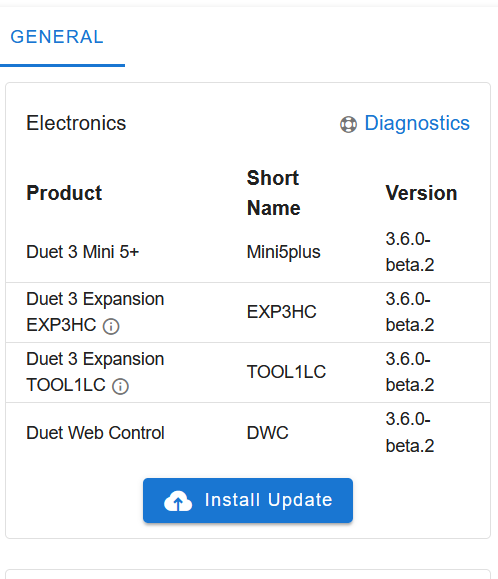
@Alva It is available now: https://github.com/Duet3D/RepRapFirmware/releases/tag/3.6.0-beta.2
Ian
TronXY X5S with Duet 3 MB6HC and Roto toolboard : Cartesian bed-slinger with Duet 3 Mini 5+ WiFi and 1LC : RRP Fisher Delta v1 with Duet 2 Maestro : Polargraph with Duet 2 WiFi
-
- daemon(2).g
- mini(1).gcode
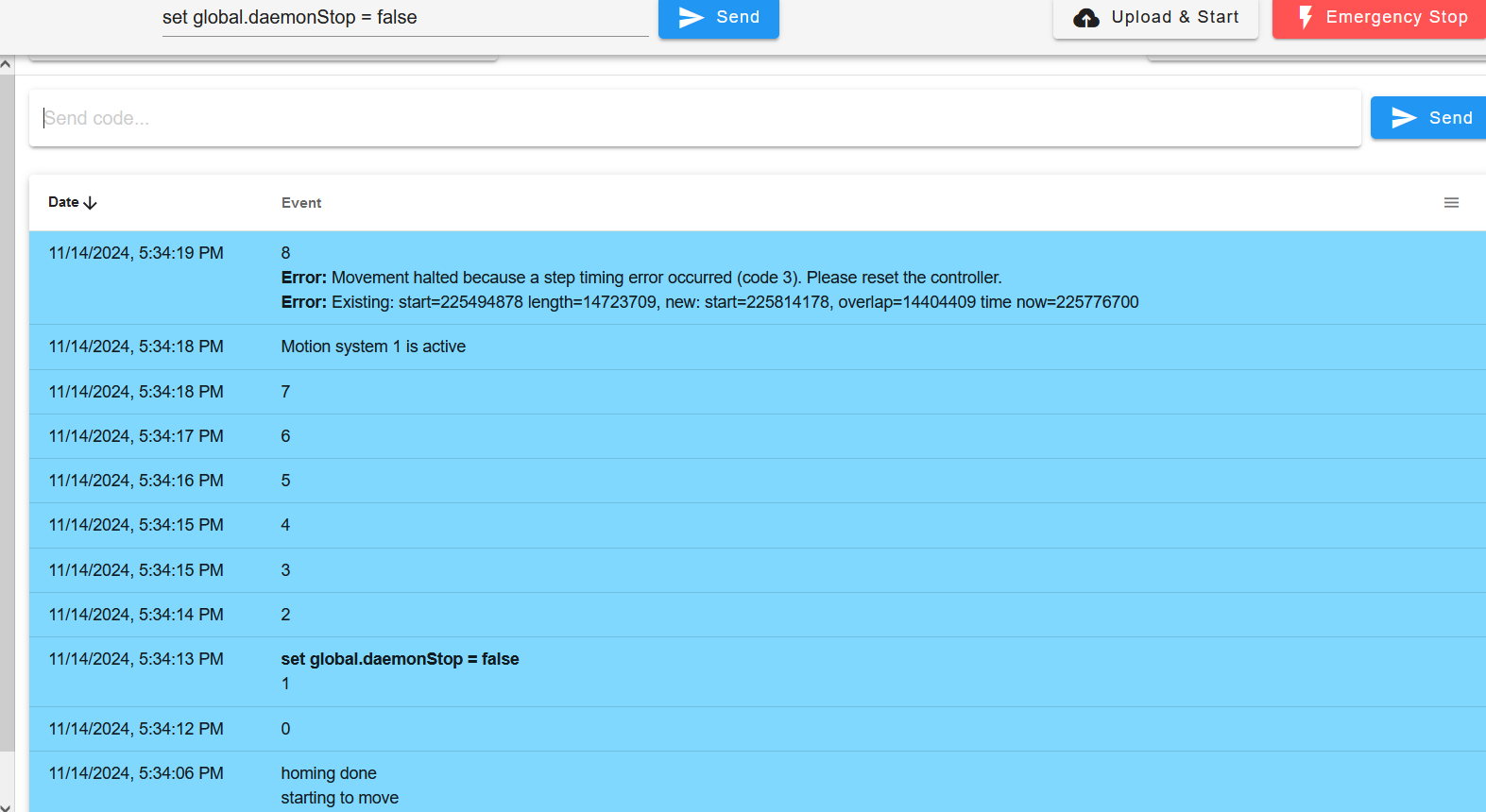
Hello , i have updated the machine to 3.6.0.beta2 and tried a simple logic as seen in the mini-1.gcode which is attached. while it starts the print i manually set the flag to enable the daemon.g and the daemon.g is also attached. And the same error occurred again. Do you think there is something wrong with the way that i understood the second motion system? or am i doing something wrong? weird that my logic worked in 3.5. fw version.
Do you think there is something wrong with the way that i understood the second motion system? or am i doing something wrong? weird that my logic worked in 3.5. fw version.
Please let me know. Thank you.")
-
@Alva Looks like there was a mistake in the 3.6.0.beta2 release and David updated the new one today. I will try out that one.
-
@Alva here are a couple of clarifications:
- When you select a tool (which becomes the current tool for the current motion system), the axes that X and Y are mapped to for that tool become owned by the current motion system.
- It's fine to drive the two motion systems from different GCode streams.
-
@Alva I just noticed this in your mini(1).gcode file:
G4 P0 S0.5
You should use either P or S in G4, not both. Similarly in daemon.g. However, this doesn't explain the error.
-
@Alva my best guess is that the move G1 X0 Y0 U0 in mini(1).gcode hasn't completed when daemon.g starts commanding U axis motion. This shouldn't be possible, because if U hasn't finished moving then U should still be owned by MS0, so the attempt to move it in daemon.g should fail with the "axis already owned by another MS" message. I'll check the M400 code.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
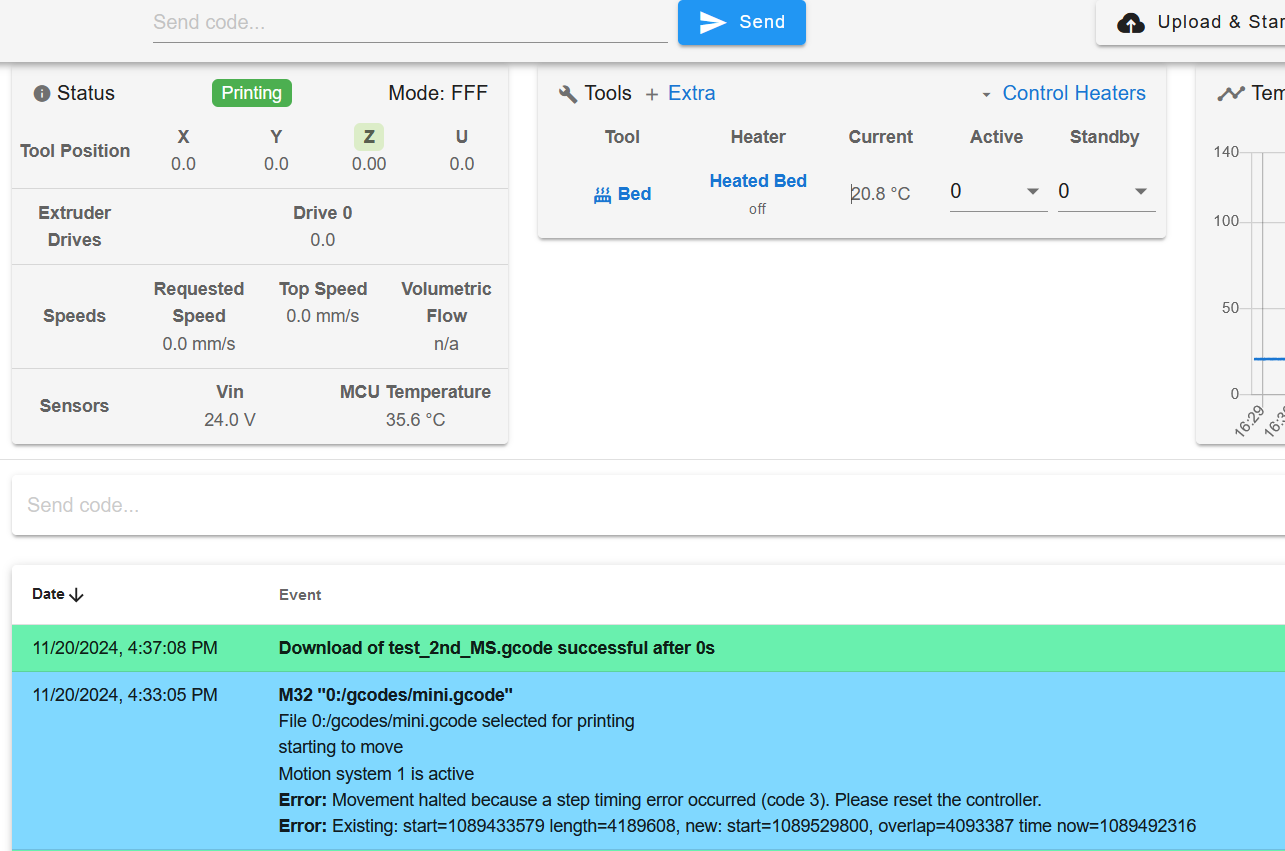
@dc42 I have edited the code and logic a bit. Found different cases:
; File Name: /sys/daemon.g if(!exists(global.daemonStop)) global daemonStop = false ; Set to 1 to stop the daemon.g, it can be use to upload a new daemon.g file while( global.daemonStop == false ) if(state.status== "processing") G91 M596 P1 G1 U5 F300 M596 G4 P0 M99; Exittest_2nd_MS.gcode
 .
.
This happened when i activated the daemon before the move to X0 Y0. But if i activate the daemon after that then it works perfectly. Cannot relate whats going on.set global.daemonStop = true ; stopped the daemon M118 S{"starting to move"} G90 G1 X0 Y0 M400 S1 G91 set global.daemonStop = false ; activated the daemon which only use U axis G1 X100 Y100 F200 M400 S1 G90 M118 S{"move done"} M99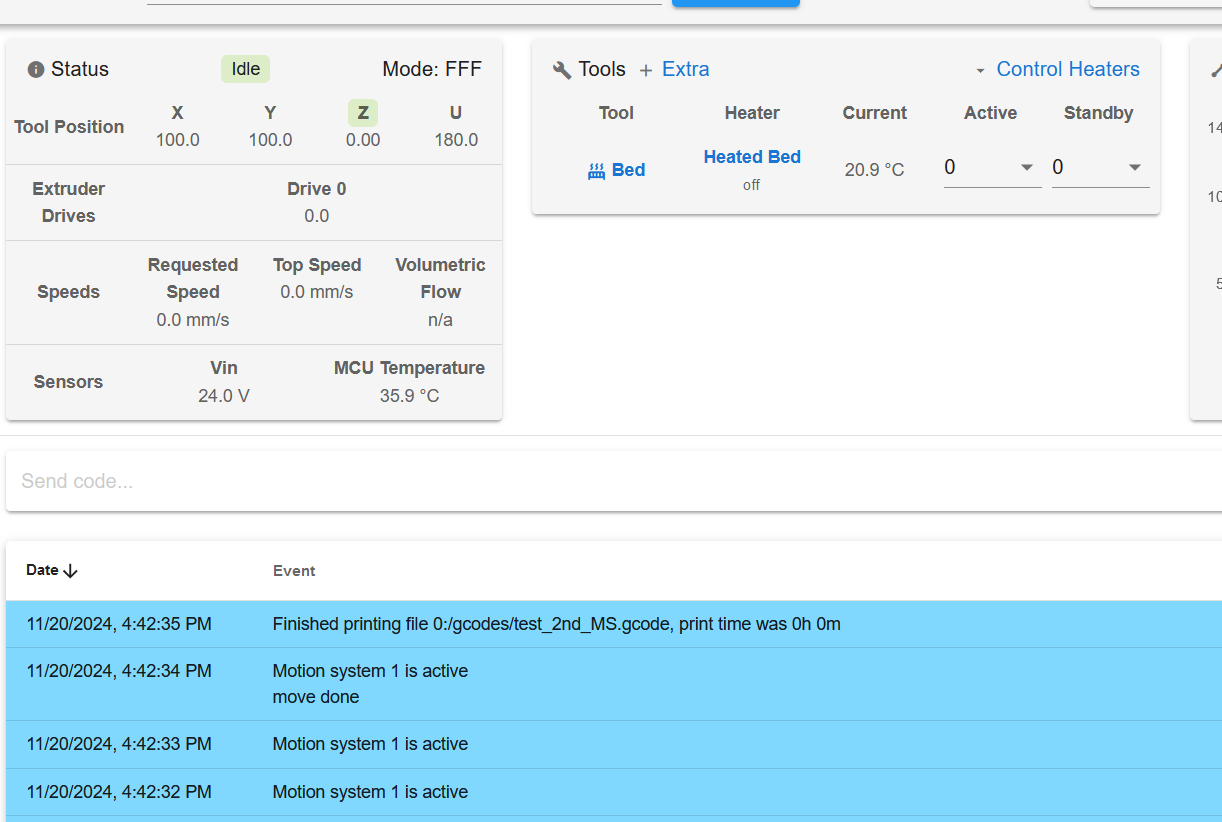
-
-
@Alva Looks like it is a timing problem or something.
-
@Alva thanks, I will try to replicate it.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 Thank you

-
@Alva I have reproduced this and I am looking into it.
-
@Alva I created https://github.com/Duet3D/RepRapFirmware/issues/1064 and I am testing a fix.
-
@Alva please try the new Duet 3 Mini firmware binary at https://www.dropbox.com/scl/fo/pasag1g18orahwvn49qp2/ABWgw6D-TyKWxxurTmGwiUE?rlkey=r9h3rjyw1l4wh7xbr8yho37gw&dl=0.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 It seems to be working. I have tried all the above conditions and works as intended. Can i expect the same fix for Duet3 6HC board as well, as i observed the same behavior in it as well. Thank you
-
@Alva I have just put a 6HC build at the same location.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 Thank you , I will check it out
-
@Alva please can you confirm if you have tested this.
-
@T3P3Tony Hello sorry, i haven't checked it out. The 6HC board i have is bit different from the original version. So i need to build it differently. I am actually waiting for the beta 3 version of the firmware now.