Combined Smart Effector and tool board for delta printers
-
@T3P3Tony said in Combined Smart Effector and tool board for delta printers:
In the end we may need an interface bracket or brackets for all or some extruder options.
Right, I thought the same. But in case of a raised Roto it would interfere with the rods?
-
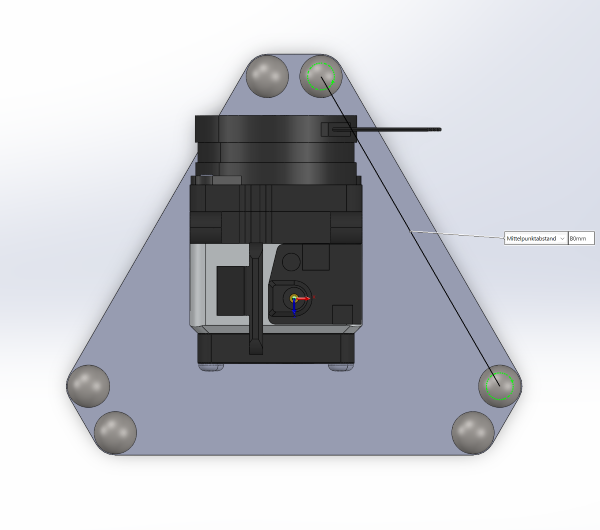
How much would the rod spacing need to be increased to accommodate the Roto without it interfering with the rods, assuming it is mounted on top of the effector as illustrated earlier?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
I would try at least one
-
@dc42 My observation was, that the roto's big footprint in @MaxGyver 's illustration was directly on the pcb.
It depends on the height of the components how much the roto would have to be raised.
Other DD-extruders like the hextrudort or sherpa mini have a much smaller footprint. I'd suggest to mount them in the same direction as the roto: with the stepper motor between the rods.A dumb question: with the accelerator chip on the effector, would it be possible to compensate tilt during probing? If so, it wouldn't have to be a nozzle touch probe, but could be any other.
The math for tilt compensation would be easy. You have the offset between probe and effector-center and you can read the tilt-changes between first homing and when the effector reaches the given probing coords. -
I would be interested in a variant for the Roto.
-
Apologies, I have overlooked your last comment!
The rod spacing would have to bee at least 80mm to fit the RevoRoto.
-
@MaxGyver thanks for that. I wonder if even 80mm would be sufficient, because your diagram suggests that if the extruder is mounted that way then the motor would likely interfere with the rod to the top left ball.
-
@MaxGyver why would it not be rotated to be between the rods?
-
@T3P3Tony This is only semi-on-topic because I have a 713-maker effector plate on my Rostock Max v2, not a Smart Effector.
But I have cobbled together a real-world implementation of an LDO Orbiter V2.0 on that effector. My solution was to rotate (20º) and raise the extruder (25mm) to clear the arms. A short length of bowden tubing within the extender keeps the filament guided between motor and extruder. It turned out that this arrangement cut down on the build envelope more than desired (allowed the motor to hit the arms at the top extreme of the plate) so I moved all of the effector's arm attachment points outward by 13mm (increasing the size of the effector plate).
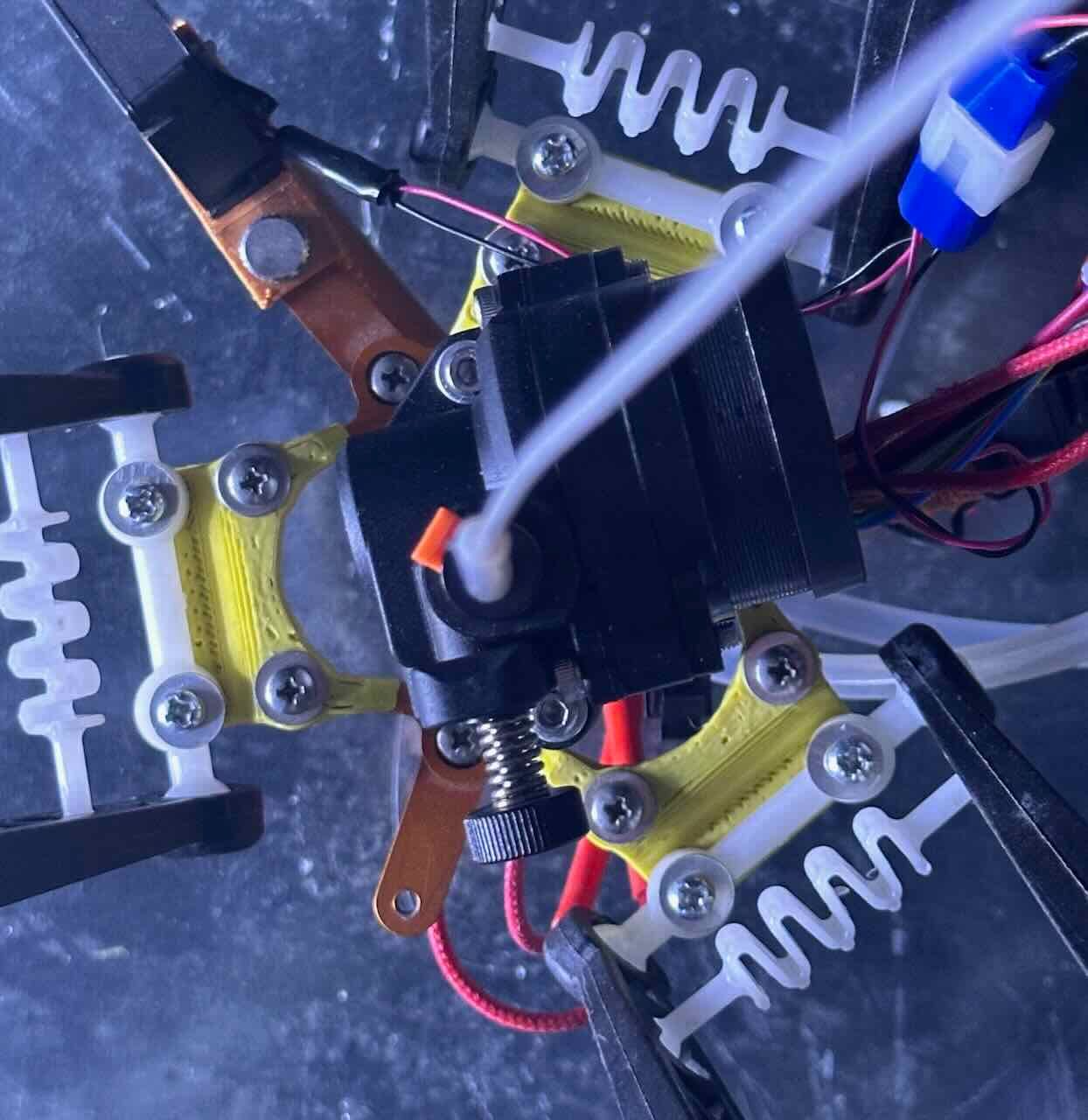
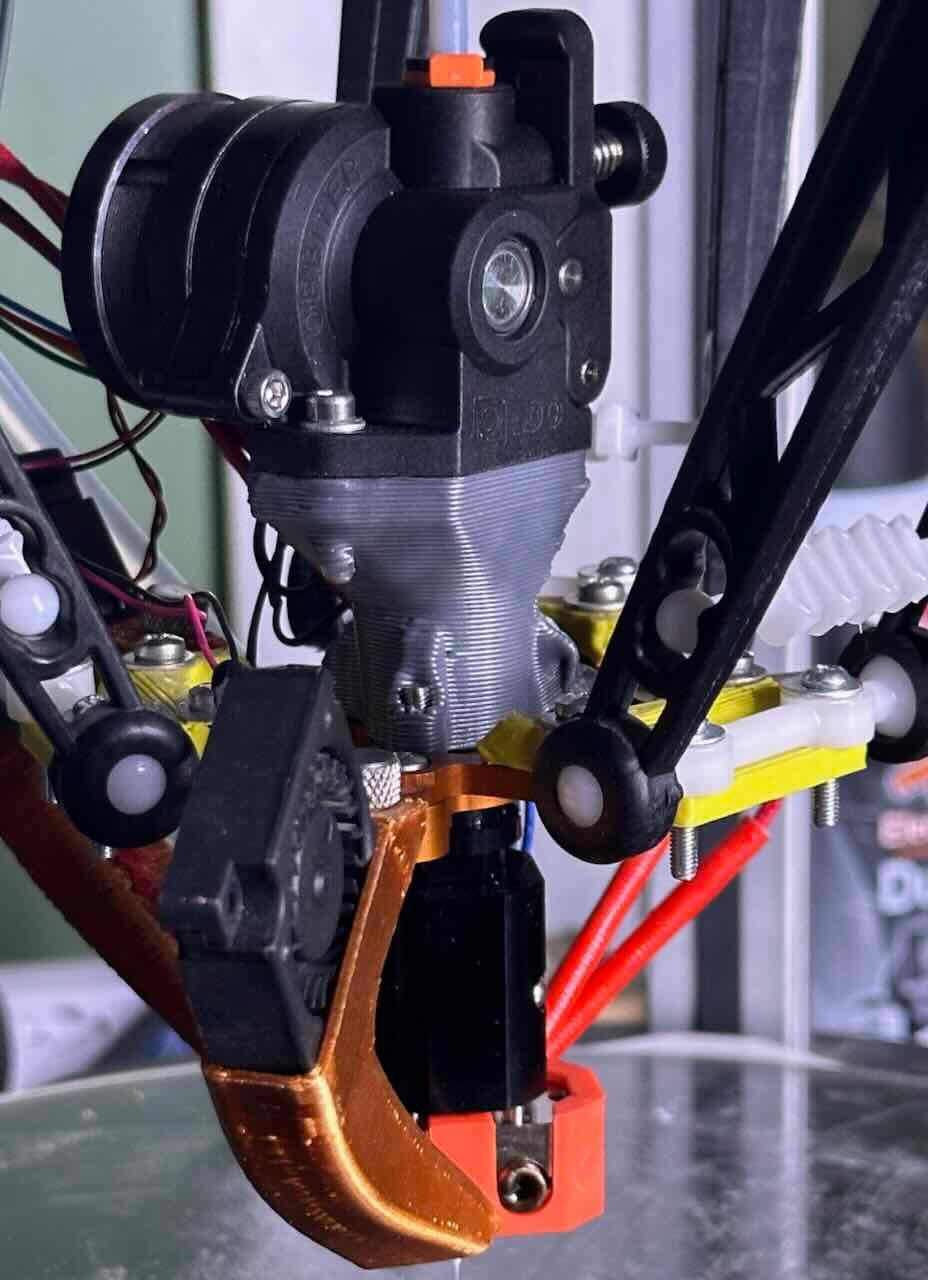
Raising and rotating the motor might have deleterious effects on momentum/vibration/tilt that outweigh the fact that it allows for a slightly smaller effector plate that still fits the motor between the arms. But it's working for me for the moment.
-
Very keen to have something like this I have an Anycubic Predator, would like to use Orbiter 2.0 and maybe Pheatus Rapido, this is the same combo I run on my Large corexy 1100mm x 700mm x670mm running Duet 3 6hc, ready to order a smart delta effector as soon as they are ready to ship
Paul -
 undefined achrn referenced this topic
undefined achrn referenced this topic