1HCL Closed Loop problems and a question
-
I am using 4 1HCL boards to drive Nema34 with encoder stepper motors. Everything works and moves fine when in Open Loop mode and Assisted Closed Loop mode (D5). When I change it over to closed loops (D4) and run the calibration command
M569.6 P52.0 V1I get this error:
Warning: Driver 52.0 warning: tuning failed Warning: M569.6: Driver 52.0 new tuning error(s): The measured motion was inconsistent.I have installed the closed loop plugin driver, but no matter what option I do, all it gives me is a scrolling blue bar after I hit record. By chance, I managed to get some kind of output from it by moving the Axis in question. Here is a screen shot of the graph:
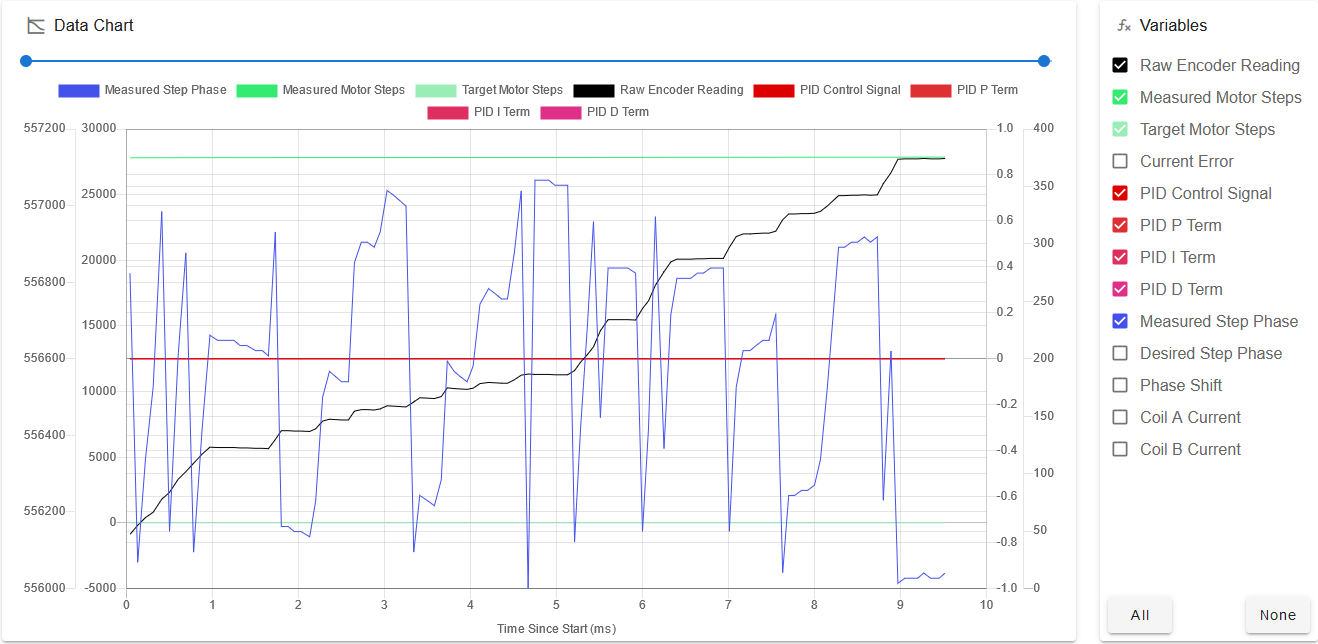
It seems like I am getting something, but I have 0 experience knowing what I should be seeing.
Here is the driver configuration, the one I am working on is P52 atm:
; Drives M669 K0 ; explicitly set Cartesian kinematics, even if I should not need to M569.1 P50.0 T2 C5 R100 I0 D0 ; Configure the 1HCL board at CAN address 50 with a quadrature encoder on the motor shaft that has 5 steps per motor full step. M569.1 P52.0 T2 C5 R100 I0 D0 ; Configure the 1HCL board at CAN address 52 with a quadrature encoder on the motor shaft that has 5 steps per motor full step. M569.1 P53.0 T2 C5 R100 I0 D0 ; Configure the 1HCL board at CAN address 53 with a quadrature encoder on the motor shaft that has 5 steps per motor full step. M569 P51.0 S1 ; Z Axis no closed loop M569 P50.0 D5 S1 ; Y2 Configure the motor on the 1HCL at can address 50 as being in closed-loop drive mode (D4) and not reversed (S1) M569 P52.0 D5 S0 ; X1 Configure the motor on the 1HCL at can address 52 as being in closed-loop drive mode (D4) and not reversed (S1) M569 P53.0 D5 S0 ; Y1 Configure the motor on the 1HCL at can address 53 as being in closed-loop drive mode (D4) and not reversed (S1) M584 X52.0 Y53.0:50.0 Z51.0; set X and Y drivers M917 X0 Y0 ; Set the closed loop axes to have a holding current of zero M350 X32 Y32 Z16 ; set steps/mm to 32 to make full use of the encoder resolution M92 X256.6532274 Y256.6532274 Z320; steps/mm for a pro series cnc M566 X900.00 Y900.00 Z60.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z180.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z20.00 ; set accelerations (mm/s^2) M906 X3000 Y3000 Z800 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeoutand the question:
The docs say:Duet firmware currently only supports tuning one driver at a time. This means that when tuning a multi-driver axis, one driver will move and the other(s) will not. If attempting to tune a multi-driver axis, please take appropriate mitigation to ensure the axis doesn't become stressed/misaligned when only one one driver moves.Does this mean it will do 1 driver and then the other and how does this apply to PID tuning?
Board: Duet 3 MB6HC (MB6HC)
Firmware: RepRapFirmware for Duet 3 MB6HC 3.4.6 (2023-07-21) (Web UI is same) -
@MiniFireDragon it sounds to me that you are running RRF 3.4.6 on the main board by a 3.5 beta or RD version on the 1HCL. Please try 3.5.0-rc.1++ on all boards, available from https://www.dropbox.com/scl/fo/gaxzegafmnmagaefo9mgc/h?rlkey=hk4wpttdje76oews8zkuh86q3&dl=0. Caution: this is not an official release, so use it with care. You will also need the 3.5beta version of the closed loop tuning plugin.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 I am using the 1HCL 3.4.6 firmware (I downloaded the zip file for 3.4.6 and uploaded it). When I give the gcode command to list the firmware it reports back as 3.4.6.
However, I will update and try the newer version and see if that helps.
Thanks.
-
@dc42 I downloaded the files and uploaded them via the Web panel upload. It asked if I wanted to update, and I said yes. Things went by updating, it rebooted and now nothing works. The panel duo I have connected just sits there saying Connecting and I cannot connect via the network interface.
-
Can you connect by USB interface and send M122 and M115 to check the firmware version installed?
-
@Phaedrux The light was dim on the board, so there was no firmware anymore. Plugged in usb and used Bossa to upload the firmware file in dc42's link.
v3.5 is telling me:
Error in start-up file macro line 84: Unknown pin name 'exp.heater3'So I am fixing it. Not sure if that is preventing the system from working because I get this now:
M569 P52.0 D4 - gives me a green box then I run M569.6 P52.0 V1 and get Error: M569.6: Driver is not enabledAs of this moment, i am looking thru the docs for the name of the laser/vfd pwm pin.
-
@dc42 Got everything updated (DWC, 1HCL, 6HC) and the firmware matches across all the boards (same as when I had 3.4). However, when I put the drive into closed loop i get:
M569 P52.0 D4 M569.6 P52.0 V1 Error: M569.6: Driver is not enabledAnd the drive does not respond, even if I leave the drive in D5, there is no response. If I take it out of closed loop I can move the drive no problem. Before I could home the drive in D5 mode.
I am not sure if I am missing something in the config. I have updated to what it says for v3.5
; Drives M669 K0 ; explicitly set Cartesian kinematics, even if I should not need to M569.1 P50.0 T2 C1000 S200 R100 I0 D0 ; Configure the 1HCL board at CAN address 50 with a quadrature encoder on the motor shaft that has 5 steps per motor full step. M569.1 P52.0 T2 C1000 S200 R100 I0 D0 ; Configure the 1HCL board at CAN address 52 with a quadrature encoder on the motor shaft that has 5 steps per motor full step. M569.1 P53.0 T2 C1000 S200 R100 I0 D0 ; Configure the 1HCL board at CAN address 53 with a quadrature encoder on the motor shaft that has 5 steps per motor full step. M569 P51.0 S1 ; Z Axis no closed loop M569 P50.0 D5 S1 ; Y2 Configure the motor on the 1HCL at can address 50 as being in closed-loop drive mode (D4) and not reversed (S1) M569 P52.0 D5 S0 ; X1 Configure the motor on the 1HCL at can address 52 as being in closed-loop drive mode (D4) and not reversed (S1) M569 P53.0 D5 S0 ; Y1 Configure the motor on the 1HCL at can address 53 as being in closed-loop drive mode (D4) and not reversed (S1) M584 X52.0 Y53.0:50.0 Z51.0; set X and Y drivers M917 X0 Y0 ; Set the closed loop axes to have a holding current of zero M350 X32 Y32 Z16 ; set steps/mm to 32 to make full use of the encoder resolution M92 X256.6532274 Y256.6532274 Z320; steps/mm for a pro series cnc M566 X900.00 Y900.00 Z60.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z180.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z20.00 ; set accelerations (mm/s^2) M906 X3000 Y3000 Z800 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout -
Not sure what I did, but I did the code
M569 P52.0 D4 M569.6 P52.0 V1And again, I got:
Error: M569.6: Driver 52.0 basic tuning failed, the measured motion was inconsistent Warning: Driver 52.0 warning: tuning/calibration failedInside the closed loop plugin
-
Any pointers as to where to look next? I double checked the wiring and the specs for the encoders. Everything seems to be in order.
-
- The "driver not enabled" message means exactly what it says. You will get it if you attempt a tuning move without either doing a standard move first (which will need to be done in open loop mode, since closed loop tuning hasn't been completed) or using M17 and the appropriate axis letter to enable the driver. We suggest you home the machine in open loop mode, then move the carriage away from the endstops so that the tuning move can be done without risk of hitting a motion limit.
- "measured motion was inconsistent" means that when the firmware tried to move the motor a small amount at a time, it didn't move consistently. This typically means that there is too much friction in the system for the motor current to overcome. You can try increasing the motor current to the maximum that the motor can take just before the tuning move, and reduce it again when the tuning move has been done.