I keep getting "The last HTTP request has timed out"
-
@t3p3tony its wied into a hub/switch and setup for DHCP. I can certainly try a different port and cable, just to rule it out.
-



-
First X, Then Y, Then Z.
-
I think you have mis-wired the homing switches so that they are shorting +3.3V to ground when triggered. The pin order of the endstop switch connectors on the Duet is not the same as on RAMPS. See https://duet3d.dozuki.com/Wiki/Wiring_and_hardware_differences_from_RAMPS_etc and https://duet3d.dozuki.com/Wiki/Connecting_endstop_switches.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 that was defintely it, as I just rewired them and came back to comment on it and saw your reply. I am still having an issue with homing the z axis though, which is using the BL touch. Its trying to home the Y axis instead of the Z.
-
Apologies, it is in fact trying to home the Z. I was confusing the carriage moving to the point in the Y, to where it begins moving the Z, for it just trying to re-home the Y.
However, the probe on the BL Touch is not deploying and the Z is moving down, away from carriage, not lifting up to it like it should be.
-
@jtrobbins1, have you seen https://duet3d.dozuki.com/Wiki/ConfiguringRepRapFirmwareCartesianPrinter#Section_Homing_Z_using_a_Z_probe ?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 I have been using this as reference. I was able to get the all of the axis moving in the right direction, but the probe is still not deploying before the z axis homing starts. I will keep digging further to see what I can find.
Here is my new config.g file, which is different than what I posted earlier and includes the changes made to fix the homing and axis movements.
; Configuration file for Duet WiFi (firmware version 1.21)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool on Tue Oct 09 2018 16:04:57 GMT-0500 (Central Daylight Time); General preferences
G90 ; Send absolute coordinates...
M83 ; ...but relative extruder moves
M555 P1 ; Set firmware compatibility to look like RepRapFirmare; Network
M550 PAIME FT-5 ; Set machine name
M551 PAIME1 ; Set password
M552 S1 ; Enable network
;*** Access point is configured manually via M587
M586 P0 S1 ; Enable HTTP
M586 P1 S0 ; Disable FTP
M586 P2 S0 ; Disable Telnet; Drives
M569 P0 S0 ; Drive 0 goes backwards
M569 P1 S0 ; Drive 1 goes backwards
M569 P2 S0 ; Drive 2 goes backwards
M569 P3 S1 ; Drive 3 goes forwards
M350 X16 Y16 Z16 E16 I1 ; Configure microstepping with interpolation
M92 X80 Y80 Z1600 E378.38 ; Set steps per mm
M566 X54000 Y36000 Z54000 E7200 ; Set maximum instantaneous speed changes (mm/min)
M203 X360000 Y72000 Z60000 E72000 ; Set maximum speeds (mm/min)
M201 X500 Y250 Z250 E250 ; Set accelerations (mm/s^2)
M906 X800 Y800 Z800 E800 I30 ; Set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout; Axis Limits
M208 X0 Y0 Z0 S1 ; Set axis minima
M208 X300 Y300 Z400 S0 ; Set axis maxima; Endstops
M574 X1 Y2 S0 ; Set active low endstops; Z-Probe
M574 Z2 S2 ; Set endstops controlled by probe
M307 H3 A-1 C-1 D-1 ; Disable heater on PWM channel for BLTouch
M558 P9 H5 F120 T6000 ; Set Z probe type to bltouch and the dive height + speeds
G31 P25 X-15 Y0 Z8.3 ; Set Z probe trigger value, offset and trigger height
M557 X20:280 Y20:280 S20 ; Define mesh grid; Heaters
M307 H0 B0 S1.00 ; Disable bang-bang mode for the bed heater and set PWM limit
M305 P0 T100000 B4138 C0 R4700 ; Set thermistor + ADC parameters for heater 0
M143 H0 S120 ; Set temperature limit for heater 0 to 120C
M305 P1 T100000 B4138 C0 R4700 ; Set thermistor + ADC parameters for heater 1
M143 H1 S280 ; Set temperature limit for heater 1 to 280C; Fans
M106 P0 S0.3 I0 F500 H-1 ; Set fan 0 value, PWM signal inversion and frequency. Thermostatic control is turned off
M106 P1 S1 I0 F500 H1 T45 ; Set fan 1 value, PWM signal inversion and frequency. Thermostatic control is turned on
M106 P2 S1 I0 F500 H1 T45 ; Set fan 2 value, PWM signal inversion and frequency. Thermostatic control is turned on; Tools
M563 P0 D0 H1 ; Define tool 0
G10 P0 X0 Y0 Z0 ; Set tool 0 axis offsets
G10 P0 R0 S0 ; Set initial tool 0 active and standby temperatures to 0C; Automatic saving after power loss is not enabled
; Custom settings are not configured
-
Homez.g File:
; homez.g
; called to home the Z axis
;
; generated by RepRapFirmware Configuration Tool on Fri Oct 05 2018 16:04:18 GMT-0500 (Central Daylight Time)
G91 ; relative positioning
G1 S2 Z5 F200 ; lift Z relative to current position
G90 ; absolute positioning
G1 X100 Y100 F2000 ; go to first probe point
G30 ; home Z by probing the bed; Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 S2 Z5 F100 ; lift Z relative to current position
;G90 ; absolute positioningHomeall.g File:
; homeall.g
; called to home all axes
;
; generated by RepRapFirmware Configuration Tool on Fri Oct 05 2018 16:04:18 GMT-0500 (Central Daylight Time)
G91 ; relative positioning
G1 S2 Z5 F2000 ; lift Z relative to current position
M98 Pdeployprobe.g ; deploy mechanical Z probe
G1 S1 X-290 Y290 F1800 ; move quickly to X and Y axis endstops and stop there (first pass)
G1 X5 Y-5 F2000 ; go back a few mm
G1 S1 X-290 Y290 F360 ; move slowly to X and Y axis endstops once more (second pass)
G90 ; absolute positioning
G1 X35 Y20 F6000 ; go to first bed probe point and home Z
G30 ; home Z by probing the bed; Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 S2 Z5 F100 ; lift Z relative to current position
;G90 ; absolute positioningM98 Pretractprobe.g ; retract mechanical Z probe
-
Have you set up the deployprobe.g and retractprobe.g files, and tested them by sending M401 and M402 ?
You should remove from homez.g the M98 commands that invoke these files, because the G30 command dies that automatically.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@jtrobbins1 said in I keep getting "The last HTTP request has timed out":
G31 P25 X-15 Y0 Z8.3 ; Set Z probe trigger value, offset and trigger height
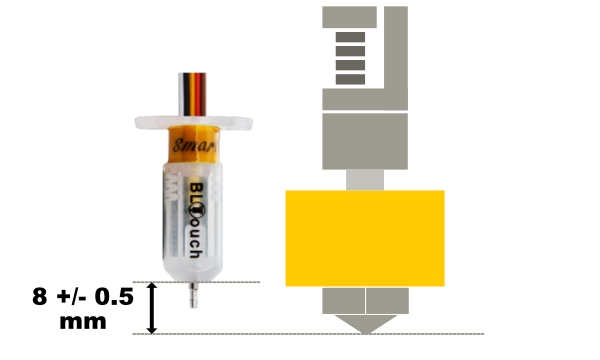
Your Z trigger height is very high. The BLTouch must be mounted with the bottom of the sensor body within 8mm +/- 0.5mm of the nozzle tip.
M566 X54000 Y36000 Z54000 E7200 ; Set maximum instantaneous speed changes (mm/min)
Your jerk values are very high. Especially for Z. You may want to reduce them by a factor of 10 at least and increase it once things are running well.
What firmware version are you actually running?
Have you verified that the BLTouch responds to the servo commands to deploy and retract when you send them?
-
@dc42 the only terminal that I can seem to get the board to connect to is YAT. Ive tried Pronterface with no luck. Ive sent the M401 and M402 commands, but nothing happens. Here are the deploy and retract files.
dpeloyprobe
; deployprobe.g
; called to deploy a physical Z probe
;
; generated by RepRapFirmware Configuration Tool on Fri Oct 05 2018 16:04:18 GMT-0500 (Central Daylight Time)
M280 P3 S10 I1retractprobe
; retractprobe.g
; called to retract a physical Z probe
;
; generated by RepRapFirmware Configuration Tool on Fri Oct 05 2018 16:04:18 GMT-0500 (Central Daylight Time)
M280 P3 S90 I1I am going to go back through the RRFC setup and makes the changes suggested below by @Phaedrux and report back.
-
It sounds like a wiring issue to me. Please check that the connection of the BLTouch to the Duet is as shown on the wiki.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 I have it wired according to the picture on the wiki. I will upload a pic. In the RRFC, the PWM channel is set to E2 Thermistor.

-
Figured it out. I confused the "I" in the code presented below for an absolute value sign (due to my lack of experience with code).
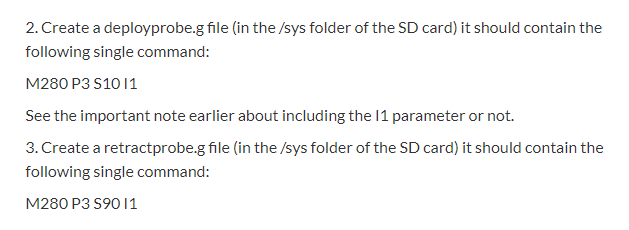
After looking through the forum posted in the wiki (https://forum.duet3d.com/topic/452/bltouch-working), I saw that it was a capital I after seeing the line of code in a terminal, as pictured below.

Idk why this didnt click earlier, as I is clearly stated for inverting the signal. Anyways, hope this may help someone in the future. Will continue setup and start a different thread if I run into different issues. Thank you all for the help!
-
@jtrobbins1 good that you have found the issue. Where did that code you have an image of come from. if its in the documentation i would like to add a note about the "I" being a "Capital Letter 'i'"
-
Sans Serif strikes again!
-
@t3p3tony its in the comments, within the linked forum post. Just click the link in my post and scroll down the page, you will see it.