Your Duet rejected the HTTP request: page not found
-
@phaedrux Motor resolution
Not sure what these are:
0.9° or 1.8° rotation per step
400 or 200 steps per revolution
Driver microstepping
// MS1 MS2 Stepper Driver Microstepping mode table
#define MICROSTEP1 LOW,LOW
#define MICROSTEP2 HIGH,LOW
#define MICROSTEP4 LOW,HIGH
#define MICROSTEP8 HIGH,HIGH
#define MICROSTEP16 HIGH,HIGH
my guess is 16 microsteps
according to the site the step motor is a:4.25V
1.7A
21-90 oz-in / 1.5-6.5 kg-cm
Hybrid
Extruder Gearing Where can I find this?Axis travel maximums
Answers:
steps per mm
#define DEFAULT_AXIS_STEPS_PER_UNIT {80,80,800,723.38} x,y,z,eTR8*8 are most common with a pitch of 2mm and a lead of 8mm
20t gt2 belt
(dont know pitch but i think its 2mm)i copied this from the marlin fw
// actual motor currents in Amps, need as many here as DIGIPOT_I2C_NUM_CHANNELS
#define DIGIPOT_I2C_MOTOR_CURRENTS {1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0}psu is 12v amps
Z Probe details: uses two endstops to trigger its autohoming
-
[0_1540502855300_ROBO3DR1PLUSV2.ino](Uploading 100%)
heres a copy of their fw -
havent been able to reconnect to the browser since i powered off and on the duet... What did i break?
-
@sleepless said in Your Duet rejected the HTTP request: page not found:
@phaedrux Motor resolution
Not sure what these are:
0.9° or 1.8° rotation per step
400 or 200 steps per revolution
Driver microstepping
// MS1 MS2 Stepper Driver Microstepping mode table
#define MICROSTEP1 LOW,LOW
#define MICROSTEP2 HIGH,LOW
#define MICROSTEP4 LOW,HIGH
#define MICROSTEP8 HIGH,HIGH
#define MICROSTEP16 HIGH,HIGH
my guess is 16 microstepsThats is a good assumption.
according to the site the step motor is a:
4.25V
1.7A
21-90 oz-in / 1.5-6.5 kg-cm
Hybrid
Extruder Gearing Where can I find this?With the steps/mm you have reported below this lets us know that the Extruder stepper is 723.38 steps/mm so you don't need to know the extruder gearing.
Axis travel maximums
Answers:
steps per mm
#define DEFAULT_AXIS_STEPS_PER_UNIT {80,80,800,723.38} x,y,z,eTR8*8 are most common with a pitch of 2mm and a lead of 8mm
20t gt2 belt
(dont know pitch but i think its 2mm)i copied this from the marlin fw
// actual motor currents in Amps, need as many here as DIGIPOT_I2C_NUM_CHANNELS
#define DIGIPOT_I2C_MOTOR_CURRENTS {1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0}psu is 12v amps
Z Probe details: uses two endstops to trigger its autohoming
This Z probe configuration sounds different from something I have come across before. How does it do this? -
@sleepless How is the Duet installed? inside the metal box? If so then Wifi communications is likely to be difficult.
Please work thoguh this guide:
https://duet3d.dozuki.com/Wiki/WiFi_disconnections_and_AJAX_timeout_errorsEspecially look at the reported Wifi signal strength if you have it in an enclosure that could be blocking WIFI.
-
@t3p3tony
At the base of the robo3d r1plus where the ramps board used to be. I tried uploading a photo from my phine but seem to be having issues. I will upload a photo from my computer. By the way since its a Greg wade extruder on the robo3d its a 4:1 gear ratio -
Thanks I will try the WiFi troubleshooting and keep you posted
-
I conntected to my pc and ran m552 saw wifi was idle so i ran m552 s1and it got the ip again. still cantconnect from browser though. I ran m122 and got
=== Diagnostics ===<LF>RepRapFirmware for Duet 2 WiFi/Ethernet version 2.0(RTOS) running on Duet WiFi 1.02 or later<LF>Board ID: 08DGM-9T6BU-FG3SJ-6J9D4-3S86T-TAXRD<LF>Used output buffers: 1 of 20 (10 max)<LF>=== RTOS ===<LF>Static ram: 28380<LF>Dynamic ram: 95784 of which 0 recycled<LF>Exception stack ram used: 300<LF>Never used ram: 6608<LF>Task NETWORK ready, free stack 1272<LF>Task HEAT blocked, free stack 1256<LF>Task MAIN running, free stack 3656<LF>=== Platform ===<LF>Last reset 00:09:07 ago, cause: power up<LF>Last software reset at 2018-10-24 20:24, reason: User, spinning module GCodes, available RAM 6152 bytes (slot 0)<LF>Software reset code 0x0003 HFSR 0x00000000, CFSR 0x00000000, ICSR 0x0041f000, BFAR 0xe000ed38, SP 0xffffffff<LF>Error status: 0<LF>Free file entries: 10<LF>SD card 0 detected, interface speed: 20.0MBytes/sec<LF>SD card longest block write time: 0.0ms<LF>MCU temperature: min 30.5, current 30.6, max 31.7<LF>Supply voltage: min 0.4, current 12.4, max 13.0, under voltage events: 0, over voltage events: 0<LF>Driver 0: standstil<Warning: Maximal number of bytes per line exceeded! Check the end-of-line settings or increase the limit in the advanced terminal settings.>I went ahead and reset my browser and mlike magic im back on the web interface.
-
@sleepless please setup the terminal to display the messages properly:
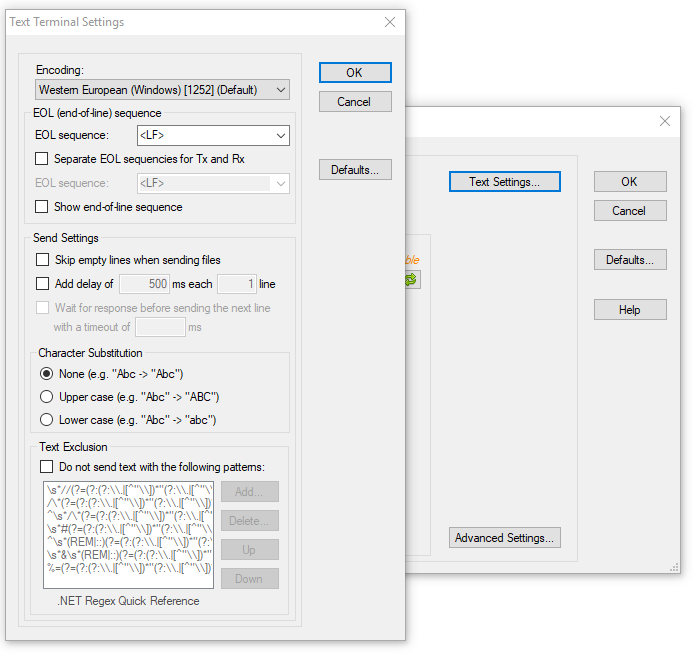
Part of the M122 message is truncated.
-
sorry about that. thanks for the picture it really helps
-
=== Diagnostics ===
RepRapFirmware for Duet 2 WiFi/Ethernet version 2.0(RTOS) running on Duet WiFi 1.02 or later
Board ID: 08DGM-9T6BU-FG3SJ-6J9D4-3S86T-TAXRD
Used output buffers: 1 of 20 (1 max)
=== RTOS ===
Static ram: 28380
Dynamic ram: 95740 of which 0 recycled
Exception stack ram used: 300
Never used ram: 6652
Task NETWORK ready, free stack 1408
Task HEAT blocked, free stack 1256
Task MAIN running, free stack 3624
=== Platform ===
Last reset 00:05:40 ago, cause: power up
Last software reset at 2018-10-24 20:24, reason: User, spinning module GCodes, available RAM 6152 bytes (slot 0)
Software reset code 0x0003 HFSR 0x00000000, CFSR 0x00000000, ICSR 0x0041f000, BFAR 0xe000ed38, SP 0xffffffff
Error status: 0
Free file entries: 10
SD card 0 detected, interface speed: 20.0MBytes/sec
SD card longest block write time: 0.0ms
MCU temperature: min 26.1, current 30.3, max 30.4
Supply voltage: min 12.3, current 12.3, max 12.5, under voltage events: 0, over voltage events: 0
Driver 0: standstill, SG min/max not available
Driver 1: standstill, SG min/max not available
Driver 2: standstill, SG min/max not available
Driver 3: standstill, SG min/max not available
Driver 4: standstill, SG min/max not available
Date/time: 1970-01-01 00:00:00
Slowest loop: 1.08ms; fastest: 0.07ms
=== Move ===
Hiccups: 0, StepErrors: 0, LaErrors: 0, FreeDm: 240, MinFreeDm 240, MaxWait: 0ms, Underruns: 0, 0
Scheduled moves: 0, completed moves: 0
Bed compensation in use: none
Bed probe heights: 0.000 0.000 0.000 0.000 0.000
=== Heat ===
Bed heaters = 0 -1 -1 -1, chamberHeaters = -1 -1
=== GCodes ===
Segments left: 0
Stack records: 1 allocated, 0 in use
Movement lock held by null
http is idle in state(s) 0
telnet is idle in state(s) 0
file is idle in state(s) 0
serial is ready with "m122" in state(s) 0
aux is idle in state(s) 0
daemon is idle in state(s) 0
queue is idle in state(s) 0
autopause is idle in state(s) 0
Code queue is empty.
=== Network ===
Slowest loop: 14.21ms; fastest: 0.01ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0)
HTTP sessions: 0 of 8- WiFi -
Network state is running
WiFi module is connected to access point
Failed messages: pending 0, notready 0, noresp 0
Failed to get WiFi status
Socket states: 0 0 0 0 0 0 0 0
=== Expansion ===
ok
- WiFi -
-
it looks like im in the -70 range which is bad. so i just need to be patient and wait for the network to see it.
-
@sleepless your Wifi does not appear to be up properly:
Failed to get WiFi status
Please can you send the following:
M552M552 S1
Also please share your config.g here
-
@t3p3tony [0_1540514887260_config (1).zip](Uploading 100%)
-
@sleepless I think you'll have to upload it as a plain text file, or just copy and paste the contents into a post.
-
; Configuration file for Duet WiFi (firmware version 1.21)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool on Wed Oct 24 2018 18:43:01 GMT-0700 (Pacific Daylight Time); General preferences
G90 ; Send absolute coordinates...
M83 ; ...but relative extruder moves; Network
M550 PRobo_Duet1 ; Set machine name
M551 Psafety13 ; Set password
M552 S1 ; Enable network
;*** Access point is configured manually via M587
M586 P0 S1 ; Enable HTTP
M586 P1 S0 ; Disable FTP
M586 P2 S0 ; Disable Telnet; Drives
M569 P0 S1 ; Drive 0 goes forwards
M569 P1 S1 ; Drive 1 goes forwards
M569 P2 S1 ; Drive 2 goes forwards
M569 P3 S1 ; Drive 3 goes forwards
M350 X16 Y16 Z16 E16 I1 ; Configure microstepping with interpolation
M92 X80 Y80 Z800 E723.38 ; Set steps per mm
M566 X900 Y900 Z12 E120 ; Set maximum instantaneous speed changes (mm/min)
M203 X18000 Y18000 Z180 E1200 ; Set maximum speeds (mm/min)
M201 X500 Y500 Z5 E25 ; Set accelerations (mm/s^2)
M906 X1000 Y1000 Z1000 E1000 I30 ; Set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout; Axis Limits
M208 X0 Y0 Z0 S1 ; Set axis minima
M208 X230 Y254 Z200 S0 ; Set axis maxima; Endstops
M574 X1 Y2 Z1 S1 ; Set active high endstops; Z-Probe
M558 P5 H5 F120 T6000 ; Set Z probe type to switch and the dive height + speeds
G31 P500 X0 Y0 Z2.5 ; Set Z probe trigger value, offset and trigger height
M557 X15:215 Y15:239 S20 ; Define mesh grid; Heaters
M305 P0 T100000 B4138 C0 R4700 ; Set thermistor + ADC parameters for heater 0
M143 H0 S110 ; Set temperature limit for heater 0 to 110C
M305 P1 T100000 B4138 C0 R4700 ; Set thermistor + ADC parameters for heater 1
M143 H1 S300 ; Set temperature limit for heater 1 to 300C; Fans
M106 P0 S0.3 I0 F500 H-1 ; Set fan 0 value, PWM signal inversion and frequency. Thermostatic control is turned off
M106 P1 S1 I0 F500 H1 T45 ; Set fan 1 value, PWM signal inversion and frequency. Thermostatic control is turned on
M106 P2 S1 I0 F500 H1 T45 ; Set fan 2 value, PWM signal inversion and frequency. Thermostatic control is turned on; Tools
M563 P0 D0 H1 ; Define tool 0
G10 P0 X0 Y0 Z0 ; Set tool 0 axis offsets
G10 P0 R0 S0 ; Set initial tool 0 active and standby temperatures to 0C; Automatic saving after power loss is not enabled
; Custom settings are not configured
-
anyone can help with the robo3d r1 plus auto level and z home setup?
-
OK I got all axis to home but cant get it to auto level. I read this https://forum.duet3d.com/topic/4737/zprobe-robo3d-r1/9 but am still confused. please help
-
Have you gone through https://duet3d.dozuki.com/Wiki/Test_and_calibrate_the_Z_probe ?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
Should my z endstop be plugged into the z probe area instead of the z endstop area on the board? Sorry Im feel like im just getting more and more confused