Sovol SV08 Multiple Motion System Upgrade.
-
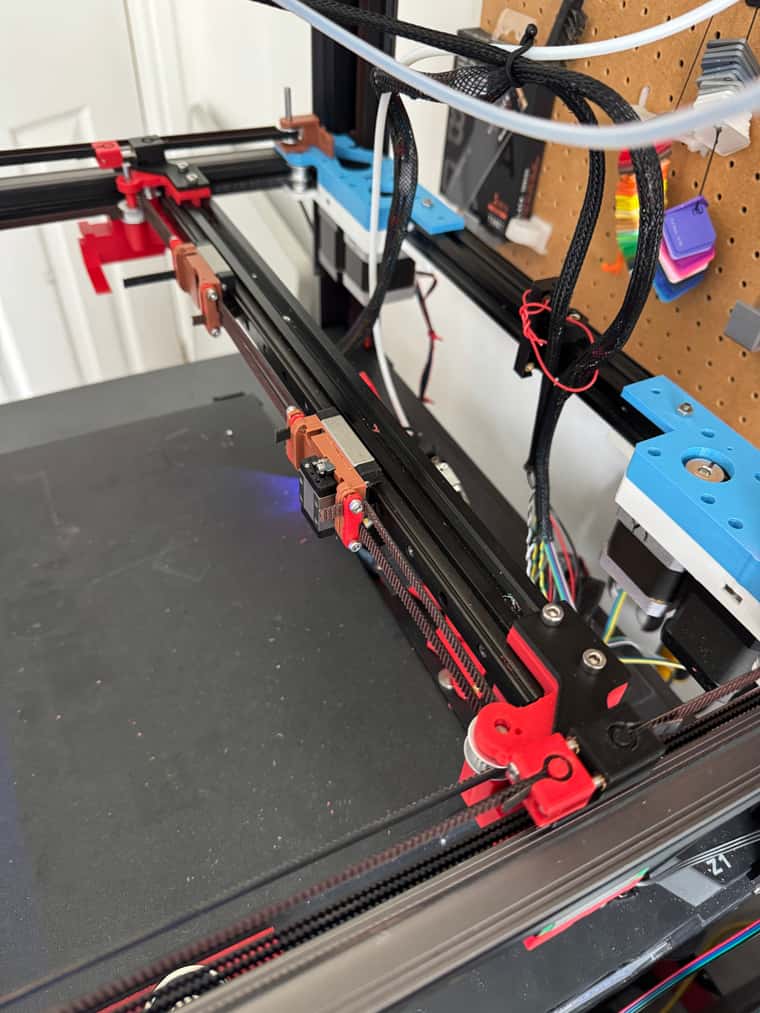
IDEX on rear gantry moving OK.
I've wired up the two extra Y motors as the C Axis - by then used M669's to convert that over to be the V axis
To move the V axis - you need to move the two new motors, plus also the two existing U + V motors.
I thought it was going to be tricky - but seems to be working surprisingly well.
Will have to do something about independently homing the two new V axis motors - to make sure that the gantry is properly at 90 degrees.
But overall quite happy so far - just need to build the 3rd extruder now and add few end stops - before working on the homing macro's + alignment etc.
; Smart Drivers M569 P0.0 S1 D2 ; driver 0.0 goes forwards (Z axis) M569 P0.1 S1 D2 ; driver 0.1 goes forwards (Z axis) M569 P0.2 S0 D2 ; driver 0.2 goes backwards (Z axis) M569 P0.3 S1 D2 ; driver 0.3 goes forwards (X axis) M569 P0.4 S0 D2 ; driver 0.4 goes backwards (Y axis) M569 P1.3 S1 D2 ; driver 0.5 goes backwards (Z axis) - changed to 1.3 forwards ;M569 P1.0 S0 D3 V2000 ; driver 1.0 goes backwards (U axis) ;M569 P1.1 S0 D3 V2000 ; driver 1.1 goes backwards (V axis) M569 P1.0 S0 D2; driver 1.0 goes backwards (U axis) M569 P1.1 S0 D2 ; driver 1.1 goes backwards (V axis) M569 P1.4 S0 D2 ; Z-hopper 2 M569 P0.5 S1 D2 ; Z-hopper 1 M569 P1.5 S0 D2 ; VH Axis Left M569 P1.6 S1 D2 ; VH Axis Right M569 P121.0 S0 D2 ; driver 121.0 goes backwards (extruder 0) M569 P122.0 S0 D2 ; driver 122.0 goes backwards (extruder 1) ; Motor Idle Current Reduction M906 I30 ; set motor current idle factor M84 S30 ; set motor current idle timeout ; Axes M584 X0.3 Y0.4 Z0.1:0.2:0.0:1.3 U1.0 V1.1 A1.4 B0.5 C1.5:1.6; set axis mapping M350 X16 Y16 Z16 U16 V16 A16 B16 C16 I1 ; configure microstepping with interpolation M906 X800 Y800 Z800 U800 V800 A750 B150 C800 ; set axis driver currents ; A - 1.8 degree, 0.7mm pitch - 200*16/0.7 = 4571 ; A - 1.8 degree, 1mm pitch - 200*16 = 3200 M92 X80 Y80 Z533.33 U80 V80 A3200 B629 C80 ; configure steps per mm if exists(global.vMin) == false global vMin = 120 global vMax = 340 global yMin = -5 global yMax = 210 M208 X-5:310 Y-5:210 Z0:300 U3:326 V120:334.7 A0:3 B0:3 C120:334.7; set minimum and maximum axis limits M566 X540 Y540 Z100 U540 V540 A500 B300 C540 ; set maximum instantaneous speed changes (mm/min) M203 X{350*60} Y{350*60} Z{25*60} U{350*60} V{350*60} A1000 B200 C{350*60} ; set maximum speeds (mm/min) M201 X2000 Y2000 Z500 U2000 V2000 A1000 B20 C2000 ; set accelerations (mm/s^2) ; Extruders M584 E121.0:122.0 ; set extruder mapping M350 E16:16 I1 ; configure microstepping with interpolation M906 E800:800 ; set extruder driver currents M92 E492:492 ; configure steps per mm M566 E120:120 ; set maximum instantaneous speed changes (mm/min) M203 E{30*60}:{30*60} ; set maximum speeds (mm/min) M201 E250:250 ; set accelerations (mm/s^2) ; Kinematics ;M669 K8 ; configure CoreXYUV kinematics M669 K1 ; configure CoreXY kinematics ; X:Y:Z:U: V:A:B:C M669 V0:0:0:1:-1:0:0:1 M669 C0:0:0:0:01:0:0:0 -
@dwuk3d said in Sovol SV08 Multiple Motion System Upgrade.:
M569 P1.3 S1 D2 ; driver 0.5 goes backwards (Z axis) - changed to 1.3 forwards
When CanFD was new to RRF, it was a golden rule NOT to spread drivers from the same axis across different boards, but I guess the timing/lag issues are now under control?
-
@o_lampe Good spot - I did think that might be an issue - particularly with multiple motion systems - but I haven't noticed any problems so far.
I wanted XY & B (the zHopper for X) to be on the same board - and there wasn't room on the 6HC for all 4 Z Axis.
I suppose I should really swap everything around and have the rear gantry on the 6HC as U V1 V2 C(u2) A(zhU) D(zHu2)
Then the front Gantry and Z on the 7 way Mini5+. X Y Z1 Z2 Z3 Z4 B(zhX)The 6HC and Mini5+ have different size connectors for the motor drivers which adds to the complication.
-
@dwuk3d I'm not sure if this is still an issue anyway.
But when you use two motors on the same belt, it might not be a good thing if they don't move super-synchronous. Worst thing would be loosing steps, when the motor who's trying a headstart is too weak to power through. -
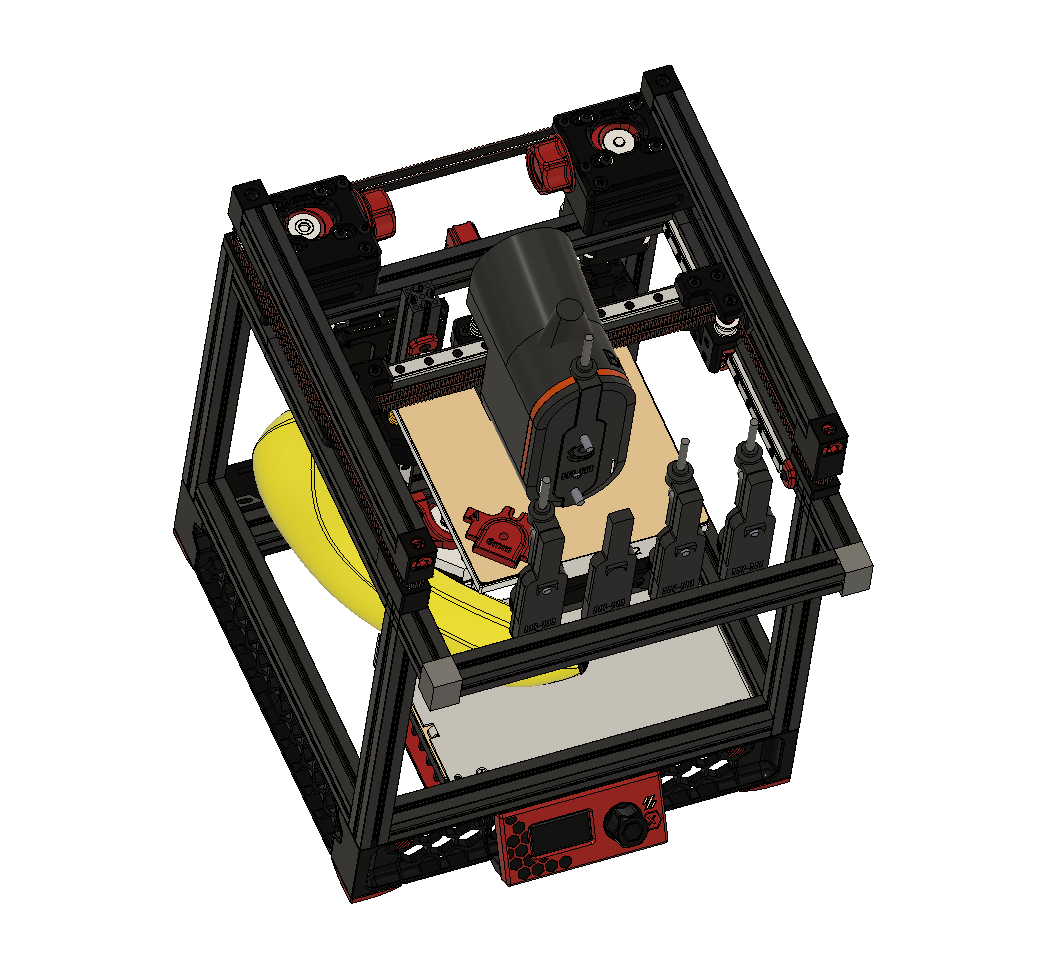
It moves......
Next step - wire up 3rd extruder with 1LC tool board.
Then some more end stops and homing.
-
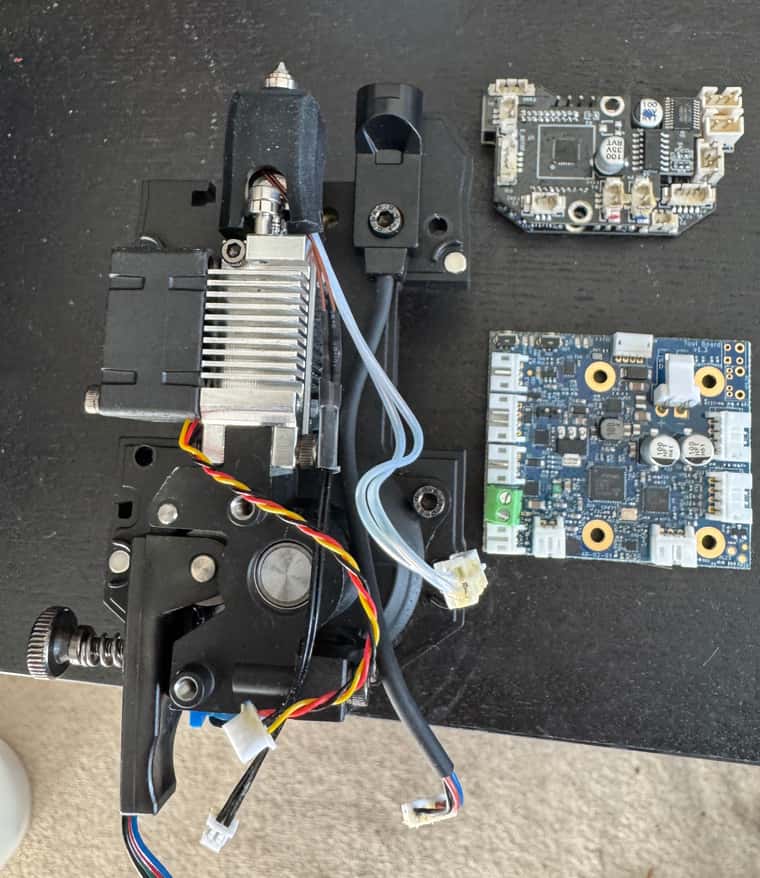
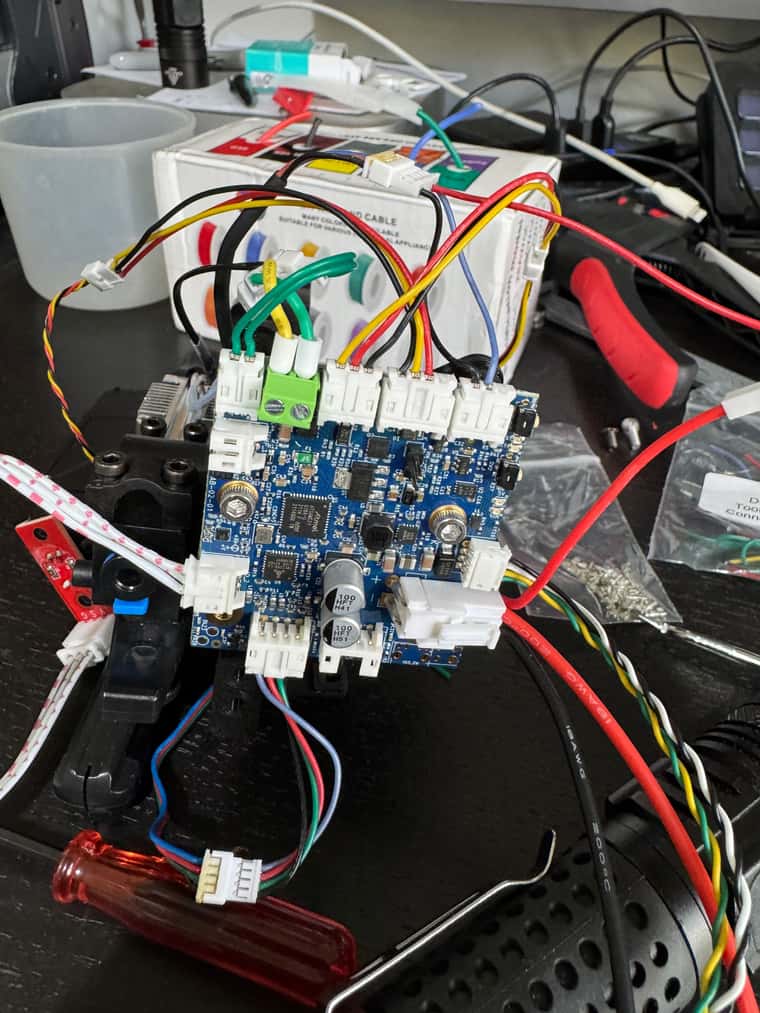
Starting on wiring up the 1LC on the last extruder.
Horizontal placement of the board above the extruder is not that neat - but I guess the for left hand extruder the overlap isn't a big issue.
For the other two extruders I made up adaptors - to make the upgrade reversible - I think for this one I will take a different approach - and cut and replace the connectors on any cables that are long enough - as likely to have two spare extruders once I do the INDX upgrade even if I end up trying a Klipper version later.
-
@dwuk3d All wired up

-
Updated my CAD for INDX a bit based on latest pictures, plus created a Voron Zero version.





-
Almost ready to start trying homing.
Decided to home the left extruder on the right extruder - mainly so that can use an identical design for two extruders.
So right extruder will need to be homed first on the gantry.
Also doubled up on end stops again - so single optical sensor left extruder for U axis (X) (homing on to other extruder) , D Zhopper, then another single optical sensor for right extruder - C axis (X) and A Zhopper.
Will probably have to rationalise the axis letters at some point.
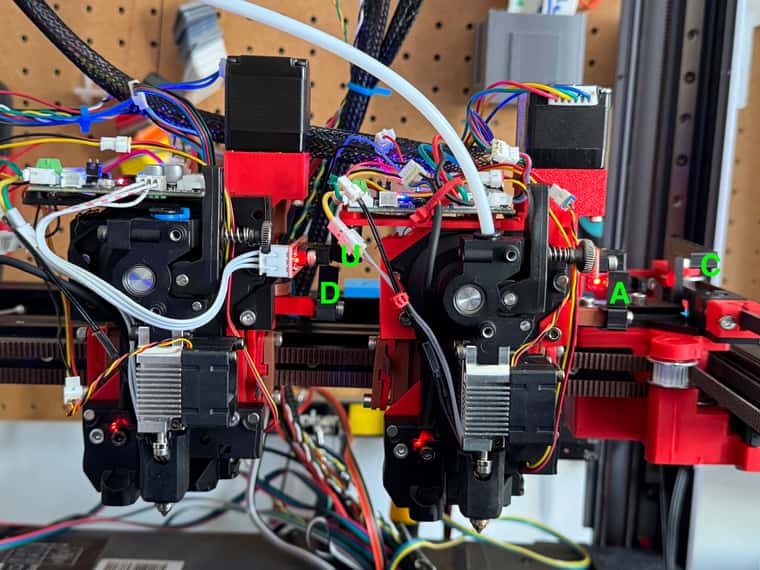
Used an M4 bolt again for lead screw on left extruder as need to order some more lead screw nema 11s.
-
Rough scale of Bondtech INDX toolhead overlaid over my current SOVOL toolhead.



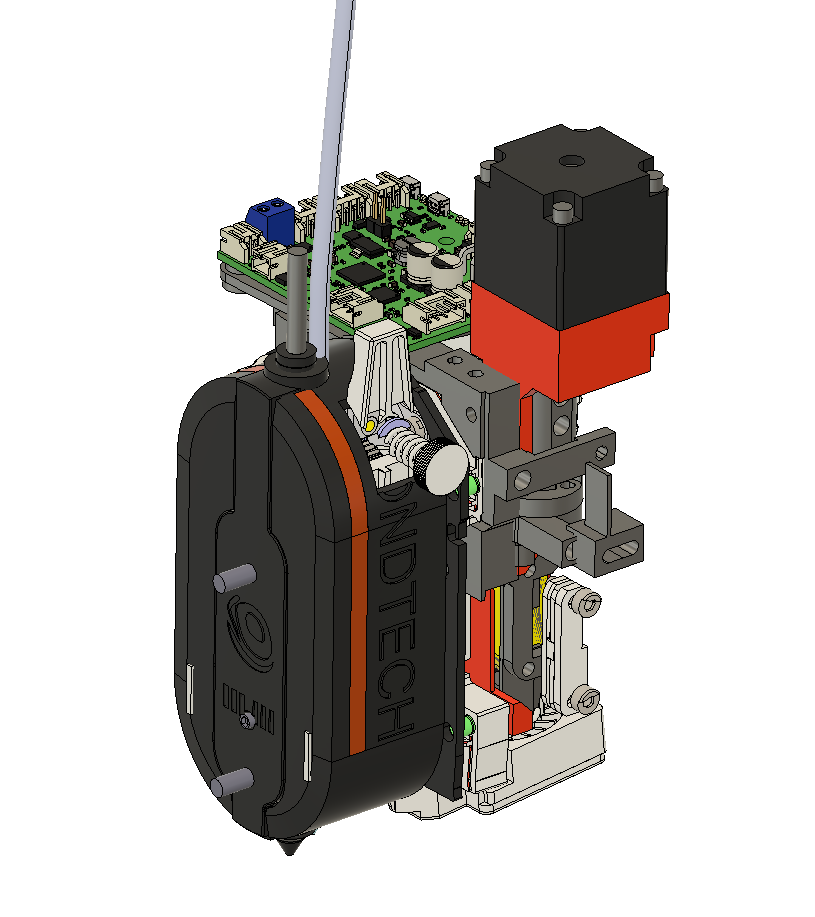
-
@dwuk3d The main negative I can see of the Bondtech INDX that I can see is that the nozzle is far forward, away from the X axis and carriage. This is understandable given the layout, but I think it will mean losing some Y axis, or mean that the bed will have to move towards the front of the printer for full coverage.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts Your input just started a long train of thought, but it's not related to this thread.
[OT]
The almost forgotten screw-extruder was build as DD extruder (hollow shaft a.s.o.) but with a bit of modification it could become a super compact tool changer, similar to the INDX. Plus it wouldn't need hollow shaft motors anymore.(no filament softening issues! ) -
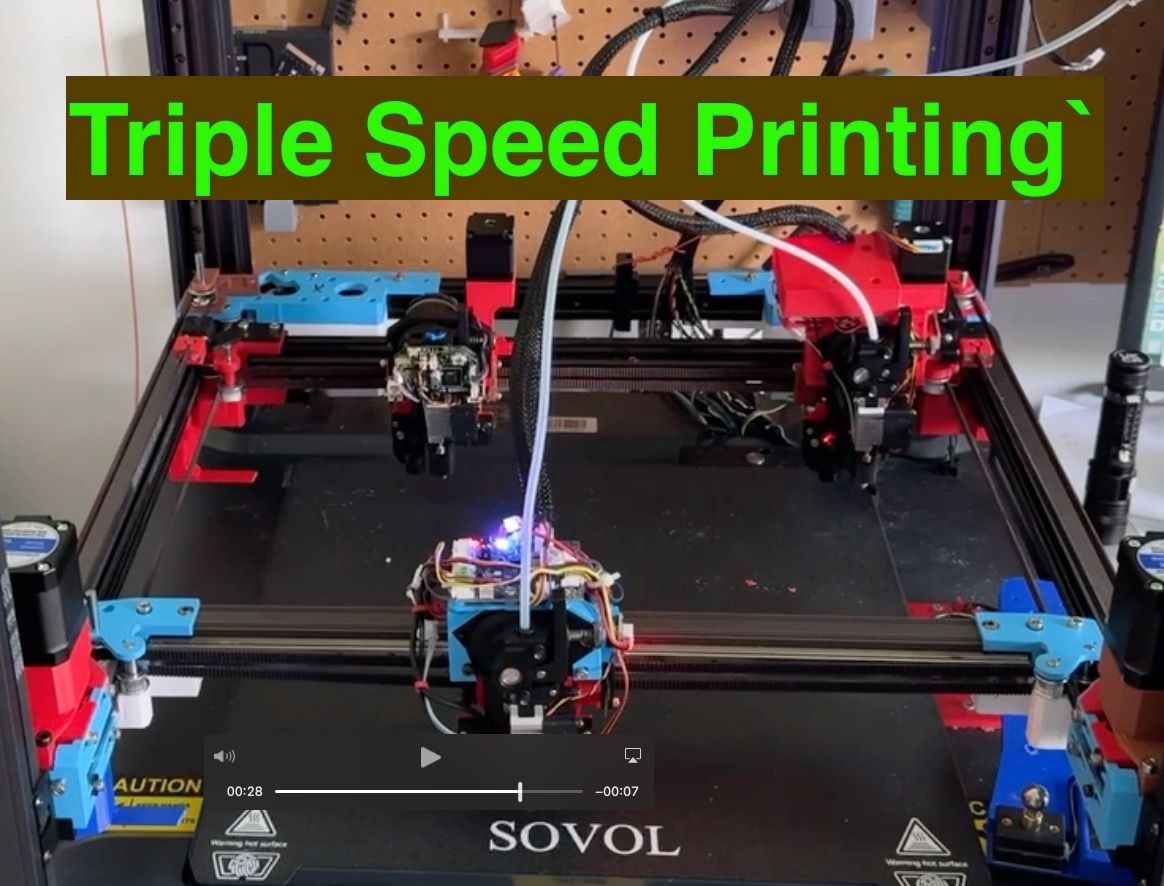
First proper three headed print.
Some work required on alignment, purging and speed - but quite pleased with results so far.
Gantry 1 and 2 are running on different motions systems - and very slightly in parallel.
https://youtu.be/4TYAep9QcUE
Three colour build area a little bit restricted - so need to get the print heads a little bit smaller...
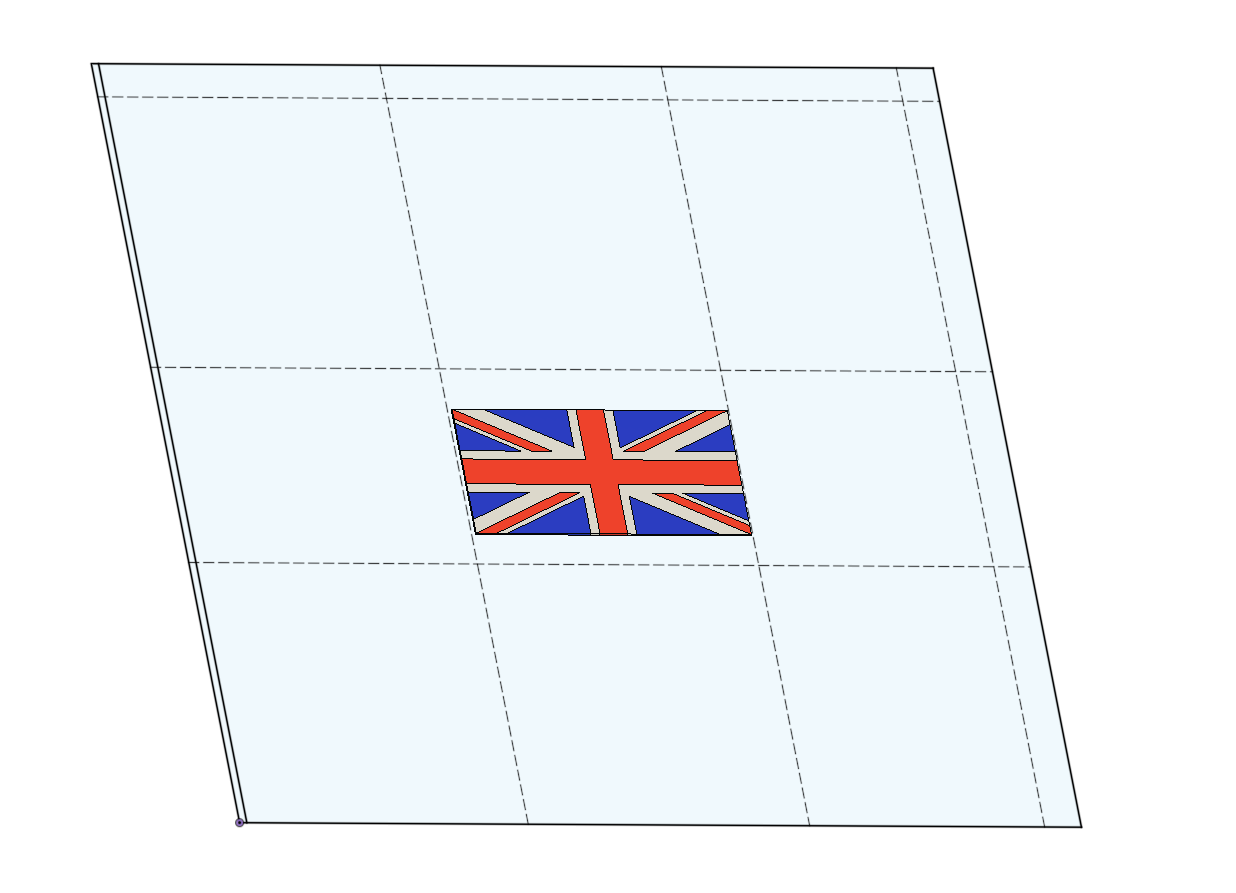
NB/ Flag on printer is 70% of this scale - so could print a slightly bigger one.Changed over C gantry to be W as missing out a letter caused problems with tools definitions.
Also put V motors on correct AxisKinematics now simply the following
M669 K1 ; configure CoreXY kinematics ; X:Y:Z: U: V: W:A:B:D M669 V0:0:0: 1: 1:-1:0:0:0 -
@dwuk3d said in Sovol SV08 Multiple Motion System Upgrade.:
Changed over C gantry to be W as missing out a letter caused problems with tools definitions.
Missing out a letter should not matter. What might matter is that in the M584 command that creates the axes, C default to rotary but W defaults to linear.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 when I had the X axis on T2 as 7 - which was C, when I tried to move on the X axis it would move only in 0.1mm steps - and it went in the wrong direction.
If I tried to move in bigger increments it would stop.
Changing over to W not a big issue - I think it makes more sense having rear gantry as UVW - than UVC
I still have a gap between B & D - but doesn't seem to be causing any issues so far.
-
Thinking about getting full coverage of the bed for all print heads.

My current plan for the next phase is occasionally moving bed in the Y direction - like this
https://youtu.be/479ecxP-sOE?t=194

I'm now wondering whether to go straight to phase 6 - the rotating bed approach might work better for the next phase.
It doesn't even need to be infinitely rotating - as that would require slip rings etc for the wiring.Could for this phase just have it rotate 90, 180 , 270 degrees and back which the wiring should be able to handle - and I think that would mean the whole bed would be reachable by all 3 print heads.
Biggest challenge would be ideally carrying on printing while the rotation is happening, plus where to put the probe.
-
Awesome print video

I'd give it a like, but I don't watch YT while being logged in.
I've noticed, the red tool was pretty impatient priming and wiping the nozzle, while blue was still printing. I guess that's a matter of postprocessing.
Changing from red to white or vice versa is a different act, because they move on the same y-beam and the unused tool is up in the air.
Maybe you can lower it for wiping and raise it again until it's on duty?@dwuk3d said in Sovol SV08 Multiple Motion System Upgrade.:
My current plan for the next phase is occasionally moving bed in the Y direction
It's obvious how much print area you loose with the blue tool looking in the same direction...but for tool change-reasons you have to look for Plan B
You might not even need a bigger heater for the bed, since the print area is still the same.
PS: If you take the bed-slinger route anyway, why not reconstruct the gantry to move only in X-direction and let the bed do Y. Just like many Prusa I3 clones still do.
It'll save a ton of motors/belts/idlers on the gantryForget that, you want to print with 2 heads simultaneously later on, which is impossible with a bed slinger...
-
@o_lampe Thanks - yes some of the tools did start priming a bit early - I need to tweak my timing algorithm - its based on calculating the required delay within the 20 seconds preheat window, then just kicking off reheat and then prime as soon as heat up is complete. I should delay prime until the last few seconds. - also the 20 seconds pre-heat the slicer sends isn't always completely accurate - might just be a bug, or might be that I haven't got the printer completely configured exactly as its defined in the slicer in terms of speeds and accelerations.
I was really pleased though at how quick the tool changes are coming - will be even more apparent when I do prints with less of some of the colours per layer.
I have considered investigating simulations - but I might just try making the algorithm monitor itself and auto adjust - at least when it repeats the same print.
Yes I can't parallel prime when printing between the heads on the same gantry - and I do need to sort out some of the details - like lifting and lowering.
I will hopefully stay at this phase for a few months to get the parallel printing working really well, - especially with a combination of Independent and IDEX -
The beg slinger approach I am not sure about - it might be a step backwards - and does bring space issues - so might consider extending the whole frame - at least in the Y direction.
-
@dwuk3d As long as you don't go the rotating bed route, I'm sure you'll be succesful.
It has been proven (by @CNCmodeller ) that the accelerations required to print near the center of a rotating bed are impossible to achieve. The center itself is a No-Go zone. -
@o_lampe Can't find the @CNCModeller post - although I suspect you are talking about rotary printers - with the rotary motion is one of the Axis - and when you are right in the centre you need to speed the spinning up very fast to get the same amount of motion as you would get from the edge.
I'm not proposing that - I am still proposing a normal XY type AXIS - just having rotary as mainly a way of moving parts of the bed to different places within the print head envelope to allow better coverage / more parallel printing.
Continuous rotation would be nice too - to allow things like parallel vase mode prints.
