Play with Input Shaping
-
Hello I had install the accelerometer on my home made delta (R400 H500) printer:
Now I'm trying to understand how it works, This is without filter:

and this adding the filter that some testing I think have the better results:

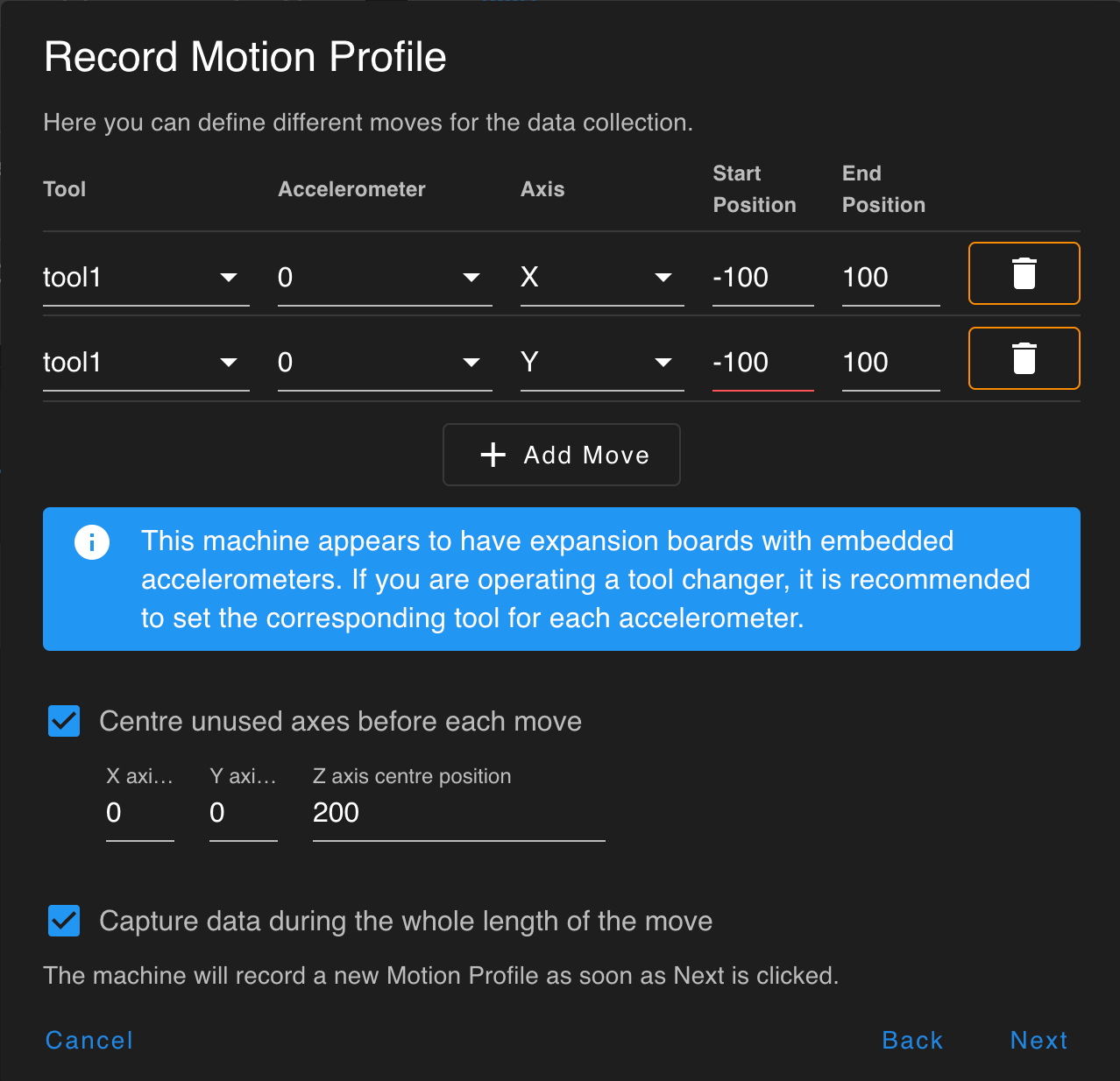
There is the movements:
My questions are:
- Why the does the filter acts so little?
- What is damping factor?
- How can I do to make better results?
Thansk!
-
@samu_87 what M566 settings do you have for X and Y in config.g? High values make input shaping less effective. The default value of 600 works well on most machines.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 i have X600 and Y600
I add my config.g maybe it can be useful
; executed by the firmware on start-up ; ; General preferences G90 ; Send absolute coordinates... M83 ; ...but relative extruder moves M665 R280.8 L515 B200 H574.800 X0.0 Y0.0 Z0.0 ; Set delta radius, diagonal rod length, printable radius and homed height M666 X0.0 Y0.0 Z0.0 A0 B0 ; Put your endstop adjustments here, or let auto calibration find them ; Network M550 P"Delta" ; Set machine name M551 P"NoPassword" ; Set password M552 S1 ; Enable network M586 P0 S1 ; Enable HTTP M586 P1 S0 ; Disable FTP M586 P2 S0 ; Disable Telnet ; Drives M569 P0 S1 ; Drive 0 goes forwards M569 P1 S1 ; Drive 1 goes forwards M569 P2 S1 ; Drive 2 goes forwards M569 P3 S1 ; Drive 3 goes forwards M584 X0 Y1 Z2 E3 M350 X16 Y16 Z16 E16 I1 ; Configure microstepping without interpolation M92 X200.00 Y200.00 Z200.00 E432 ; Set steps per mm M566 X600 Y600 Z2800 E6000.00 P1 ; Set maximum instantaneous speed changes (mm/min) M203 X18000.00 Y18000.00 Z18000.00 E900.00 ; Set maximum speeds (mm/min) M201 X3000.00 Y3000.00 Z3000.00 E5000.00 ; Set accelerations (mm/s^2) M906 X1600.00 Y1600.00 Z1600.00 E1000.00 I30 ; Set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 Z0 S1 ; Set minimum Z ; Endstops M574 X2 P"xstop" S1 M574 Y2 P"ystop" S1 M574 Z2 P"zstop" S1 ; Z-Probe M558 P1 C"!zprobe.in" R0.4 F240 H5 T4800 G31 X0 Y0 Z0.15 P500 M557 R160 S40 ; Define mesh grid ; Heaters M308 S0 P"e1temp" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin e1temp M950 H0 C"e1heat" T0 ; create bed heater output on e1heat and map it to sensor 0 M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C M308 S1 P"spi.cs1" Y"rtd-max31865" ; configure sensor 1 as PT100 on pin spi.cs1 M950 H1 C"bedheat" T1 ; create nozzle heater output on bedheat and map it to sensor 1 M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit M143 H1 S280 ; set temperature limit for heater 1 to 280C ; Fans M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off ;CPU Fan M308 S3 Y"mcu-temp" A"MCU" ; configure sensor 3 as on-chip MCU temperature sensor M950 F2 C"fan2" Q100 ; create fan 2 on pin fan2 and set its frequency M106 P2 H3 T20:70 ; set fan 2 value ; Tools M563 P0 S"tool1" H1 F0 D0 ; define tool 1 G10 P0 X0 Y0 Z0 ; set tool 1 axis offsets G10 P0 R0 S0 ; set initial tool 1 active and standby temperatures to 0C M204 P1800 M579 X1.004 Y1.01 M591 D0 P1 C"e0stop" S1 ;Sensore di Fine_Filo M572 D0 S0.05 M955 P0 C"spi.cs4+spi.cs3" I20 ;Accelerometer ;T0 ;Enable Extruder M501 ; Automatic saving after power loss is not enabled ; Custom settings are not configured