Euclid facility
-
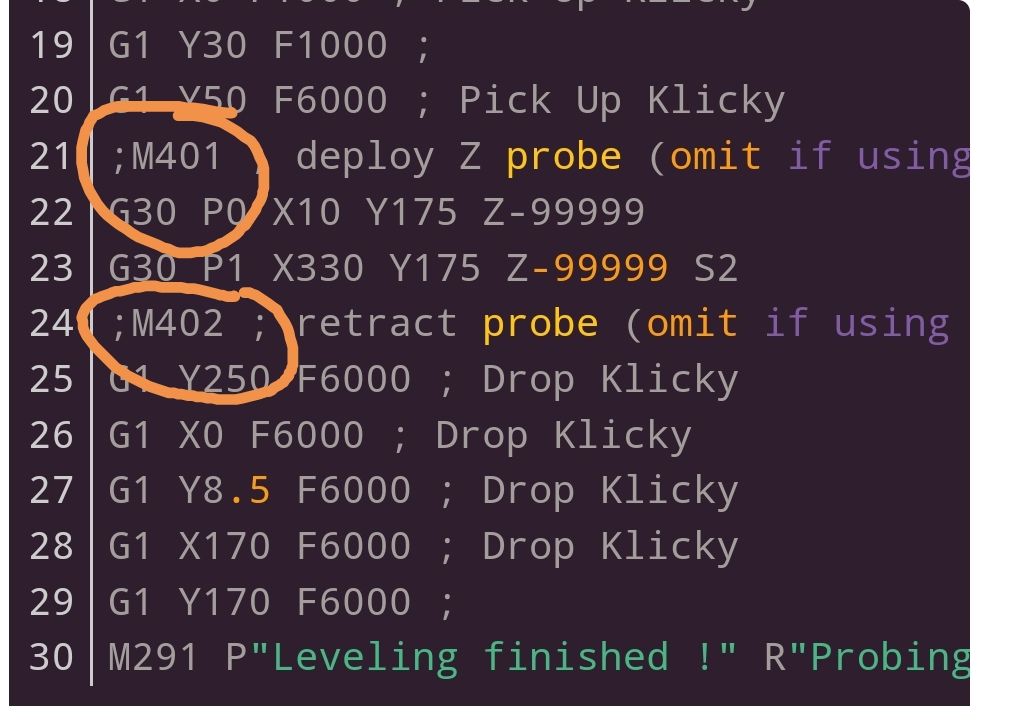
@sgk I have just realised you should also move the M291 to the bottom of the file and also comment G29 S0 out, just like this -
; bed.g ; called to perform automatic bed compensation via G32 ; ; generated by Ben Levi - BLV developer as a basic version M561 ; clear any bed transform G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position G90 ; absolute positioning G28 ; home all ;G30 P0 X10 Y175 Z-99999 ; probe near a leadscrew, half way along Y axis ;G30 P1 X330 Y175 Z-99999 S2 ; probe near a leadscrew and calibrate 2 motors ;G29 S0 ; probe the bed and enable compensation ;M291 P"Leveling started!" R"Probing.." S1 T2 G1 Y8.5 F6000 ; Pick Up Klicky G1 X20 F2000 ; G1 X0 F1000 ; Pick Up Klicky G1 Y30 F1000 ; G1 Y50 F6000 ; Pick Up Klicky ;M401 ; deploy Z probe (omit if using bltouch) G30 P0 X10 Y175 Z-99999 ; probe near a leadscrew, half way along Y axis G30 P1 X330 Y175 Z-99999 S2 ; probe near a leadscrew and calibrate 2 motors ;M402 ; retract probe (omit if using bltouch) G1 Y250 F6000 ; Drop Klicky G1 X0 F6000 ; Drop Klicky G1 Y8.5 F6000 ; Drop Klicky G1 X170 F6000 ; Drop Klicky G1 Y170 F6000 ; M291 P"Leveling finished !" R"Probing.." S1 T26HC Voron Trident based, 6XD CNC, Mini 5 polar printer
-
@jumpedwithbothfeet yes OK

 thank you
thank you -
@jumpedwithbothfeet The m 401 and m 402 I have to leave like this with [;]
-
@sgk yes that’s the quickest way to get you up and running, but it’s not the conventional way, it all depends on how you what to use your Euclid probe, I think most people would use M401 and M402 in which case you would need to remove the G1 codes from bed.g, homeall.g, and homez.g, see how you get on, the best thing about rrf is it’s flexible, there are multiple ways of achieving the same thing.

6HC Voron Trident based, 6XD CNC, Mini 5 polar printer
-
@jumpedwithbothfeet I will already change and see how it works.
-
@jumpedwithbothfeet
hello I changed but it's the same nothing to change when I do home and after g29 or g32 it doesn't probing the bed.
-
@sgk in homez.g remove or comment out -
G1 X152 Y166.4 F6000 ; go to first probe point G30 ; home Z by probing the bedin homeall.g remove or comment out -
G1 X170 Y180 F6000 ; go to first probe point X11.5 Y65.8 Z0 The coordinate put the Z sensor in the center of the bed. G30 ; Proberepost both files once you have changed them
")
-
@jumpedwithbothfeet I will change and see
-
I changed but when I run g32 or g29 it doesn't work
-
@sgk ok back to the beginning, when you home all axis, the printer does this? the euclid probe is detected and you can move all axes of the printer independently?
6HC Voron Trident based, 6XD CNC, Mini 5 polar printer
-
@sgk this thread is getting long and I have lost track of what the current problem is. Can you state it again?
To clarify how we intend a deployable probe such as the Euclid to be used:
- Put the GCode movement commands needed to deploy or pick up the probe in file sys/deployprobe.g on the SD card, and nowhere else
- Put the GCode movement commands needed to retract or stow the probe in file sys/retractprobe.g on the SD card, and nowhere else
- Then if you run M401 it should pick up the probe. If you run M401 again then it will not repeat the pickup moves, but it will increment an internal counter
- If you run M402 it will stow the probe, unless the internal counter indicates that M401 was run more than once without an intervening M402; in which case it just decrements the counter
- When you have that working, if you command the nozzle to a XY position over the bed and execute G30, it should pick up the probe, return to the original position, probe the bed, and stow the probe
- Running G29 S0 should pick up the probe, run mesh probing (assuming you have used M557 to define the grid), and stow the probe
- The only time you need to use M401 and M402 explicitly is in a bed.g file that contains multiple G30 commands. If you don't use M401 then it will pick up and stow the probe for every probe point. If you use M401 before the first G30 command then it will pick up the probe once at the start and stow it once at the end.
- Never invoke deployprobe.g or retractprobe.g directly. That would pick up or stow the probe without adjusting the internal counter, which RRF uses to keep track of whether the probe is deployed or stowed.
HTH David
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 to put it simply since I installed the euclid probe when I run the g32 or g29 command nothing happens, that is to say the probe does not palpate the bed.
I followed the euclid probe instructions. Deploy and retract config.g homeall home z. I'll make another video to see better. -
@jumpedwithbothfeet When I go home all she goes to get the probe and pats the center of the bed.
Yes I can move all my axes. -
@sgk lets start a fresh shall we? please post the contents of the following files.
-
config.g
-
homez.g
-
homeall.g
-
deployprobe.g
-
retractprobe.g
-
bed.g
-
-
retractprobe.g homez.g homeall.g deployprobe.g config.g bed.g
want the files in raw or it goes in ZIP
-
My bed 350x350x350 and prob euclid X0 y8. 5

-
M558 K0 P5 C"^io2.in" H8 F300 60 T9000 A3 S0.01
G31 K0 P500 X-27.955 Y-18.716 Z1.033If you include K0, you need to use K0 everywhere else the probe is called. You only have a single probe, so remove K0 from your config where you have it.
In your bed.g and home all you have a bunch of moves to pick the probe but then you also call the probe deploy. Your pickup moves should just be in the deploy macro.
G1 Y8.5 F6000 ; Pick Up Klicky G1 X20 F2000 ; G1 X0 F1000 ; Pick Up Klicky G1 Y30 F1000 ; G1 Y50 F6000 ; Pick Up Klicky M401 ; deploy Z probe (omit if using bltouch) -
@phaedrux ok thank you I have to change the probe control in the bed m558 and g31?
-
as this

-
https://youtu.be/9wJ2RCimWXU
it gives me that