Help Interpreting Accelerometer Data
-
I updated my Duet 3 and my tool board v1.0 to RRF 3.4 on my CoreXY. I wasn't able to find anything that gave any real insight on how to configure input shaping after gathering the accelerometer data.
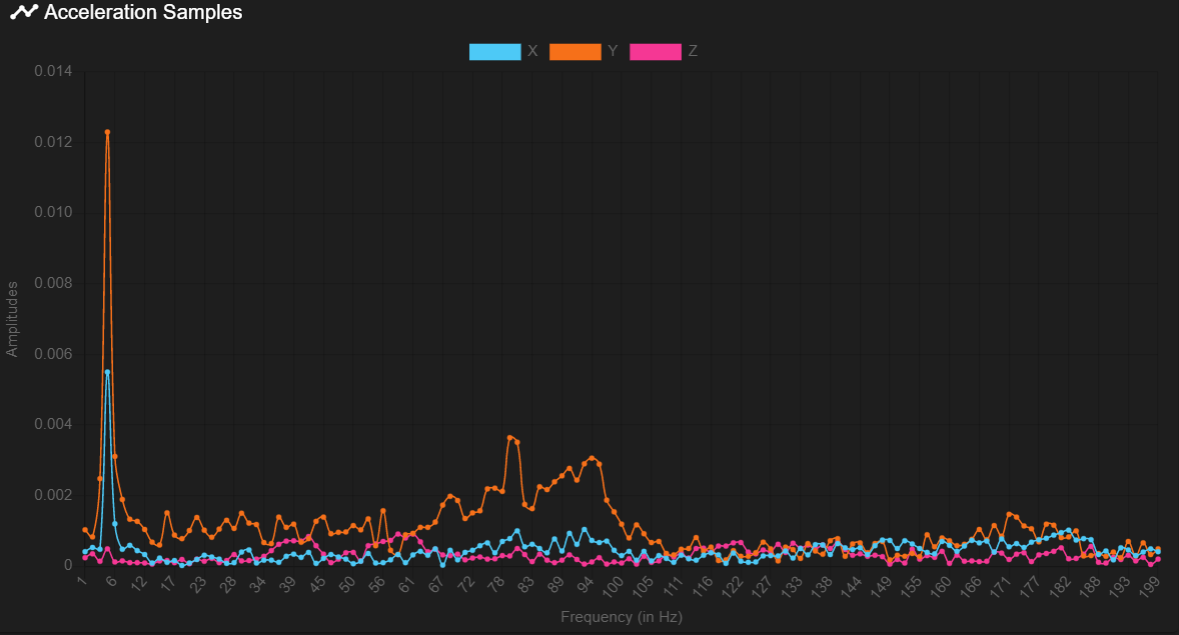
G1 X5 G4 S2 M956 P20.0 S1000 A0 G4 P10 G1 X100 F20000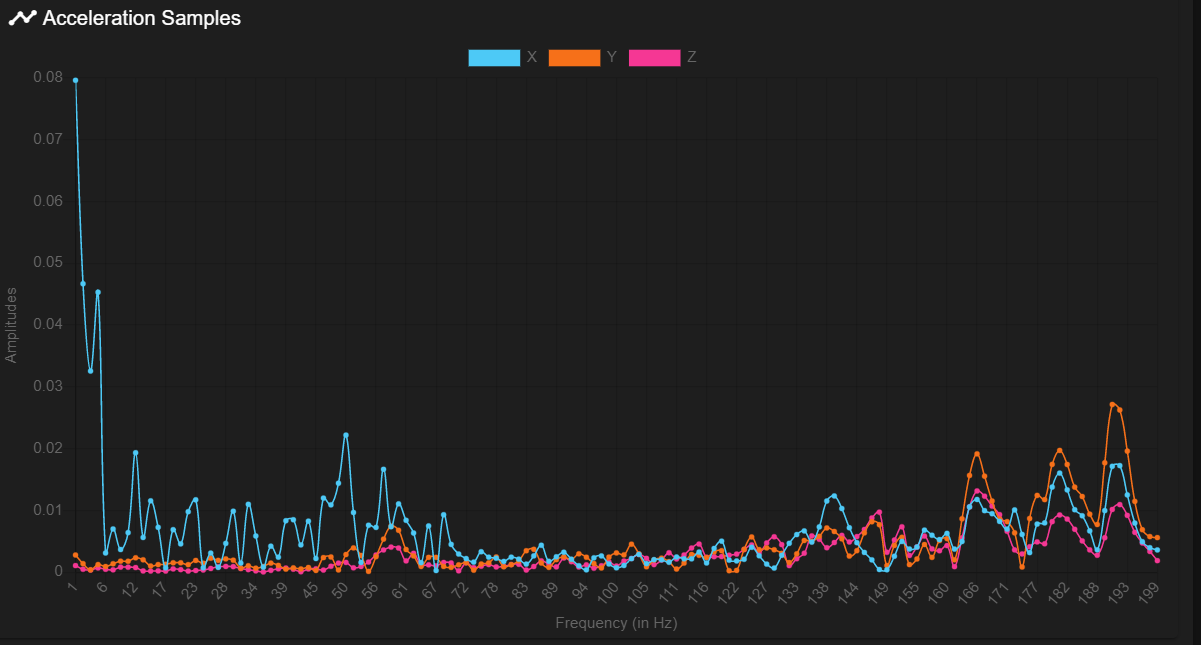
G1 Y5 G4 S2 M956 P20.0 S1000 A0 G4 P10 G1 Y100 F20000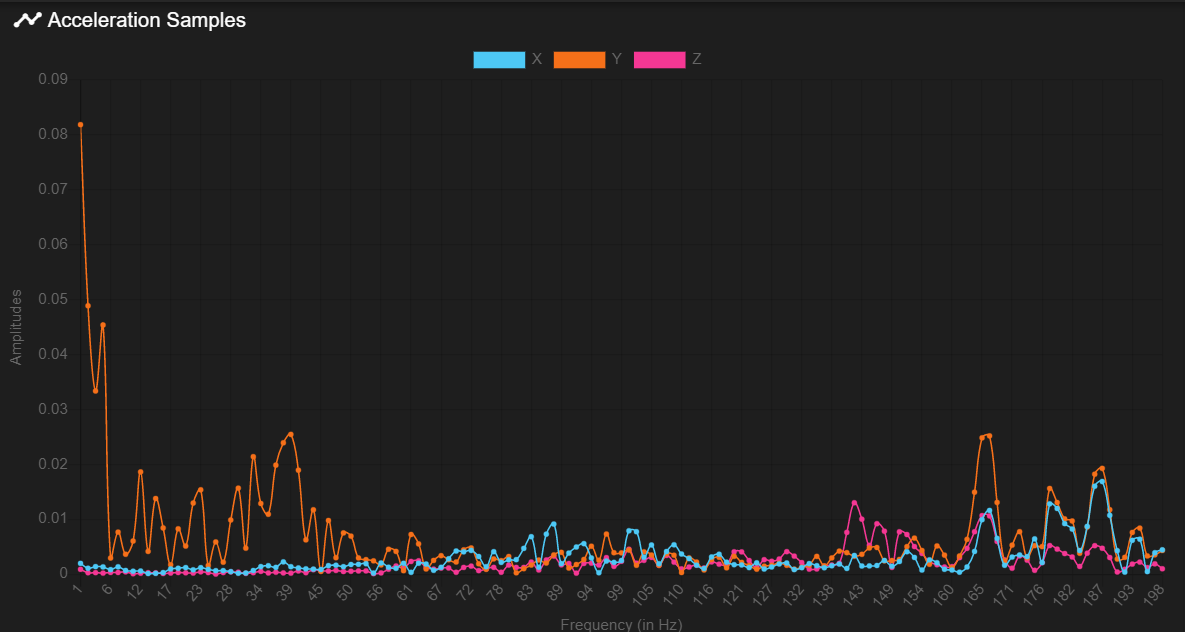
-
Bumping post
-
Can anyone provide any insight on this?
-
@dhusolo as described at https://docs.duet3d.com/en/User_manual/Connecting_hardware/Sensors_Accelerometer#using-accelerometers it is usually better to capture accelerometer data just after completing a move that stops quickly. Then you will see the resonance better, without also seeing belt noise, motor noise, and low frequency data caused by the move itself.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 I reran it like you suggested. These are the results
G1 X5 G4 S2 G1 X105 F20000 M400 M956 P20.0 S1000 A0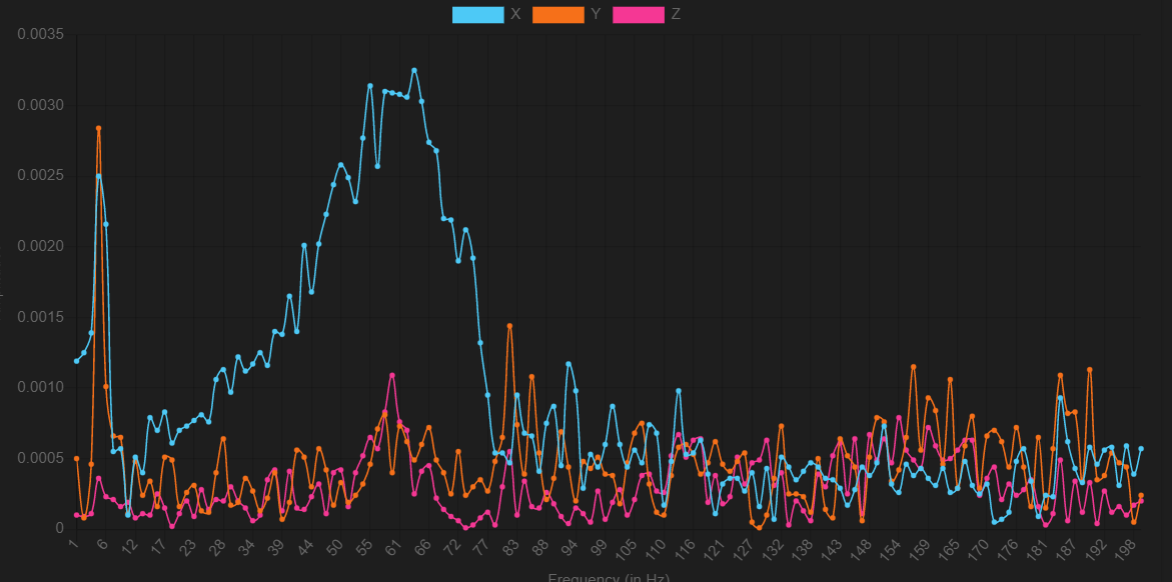
G1 Y5 G4 S2 G1 Y105 F20000 M400 M956 P20.0 S1000 A0