Input Shapers: 2HUMP_EI & 3HUMP_EI + Auto Tuning
-
My accelerometer has just arrived... Something else to tinker with when time permits.
As my printer bed moves with the part on it, I was thinking that for large parts the natural frequency will change. This begs the question could there be a way to change the parameter during a print based on the amount of filament extruded?
Just thinking out loud for now.
")
Polar Duet3 Mini + 1HCL
https://youtube.com/playlist?list=PLWjZVEdMv1BY82izahK45qKh-hp3NFkix
Wanhao D4S: Duet2
https://forum.duet3d.com/post/296755
K40 Laser, Duet2
https://forum.duet3d.com/post/312082
Wanhao D5S
https://www.youtube.com/CNCModellerUK -
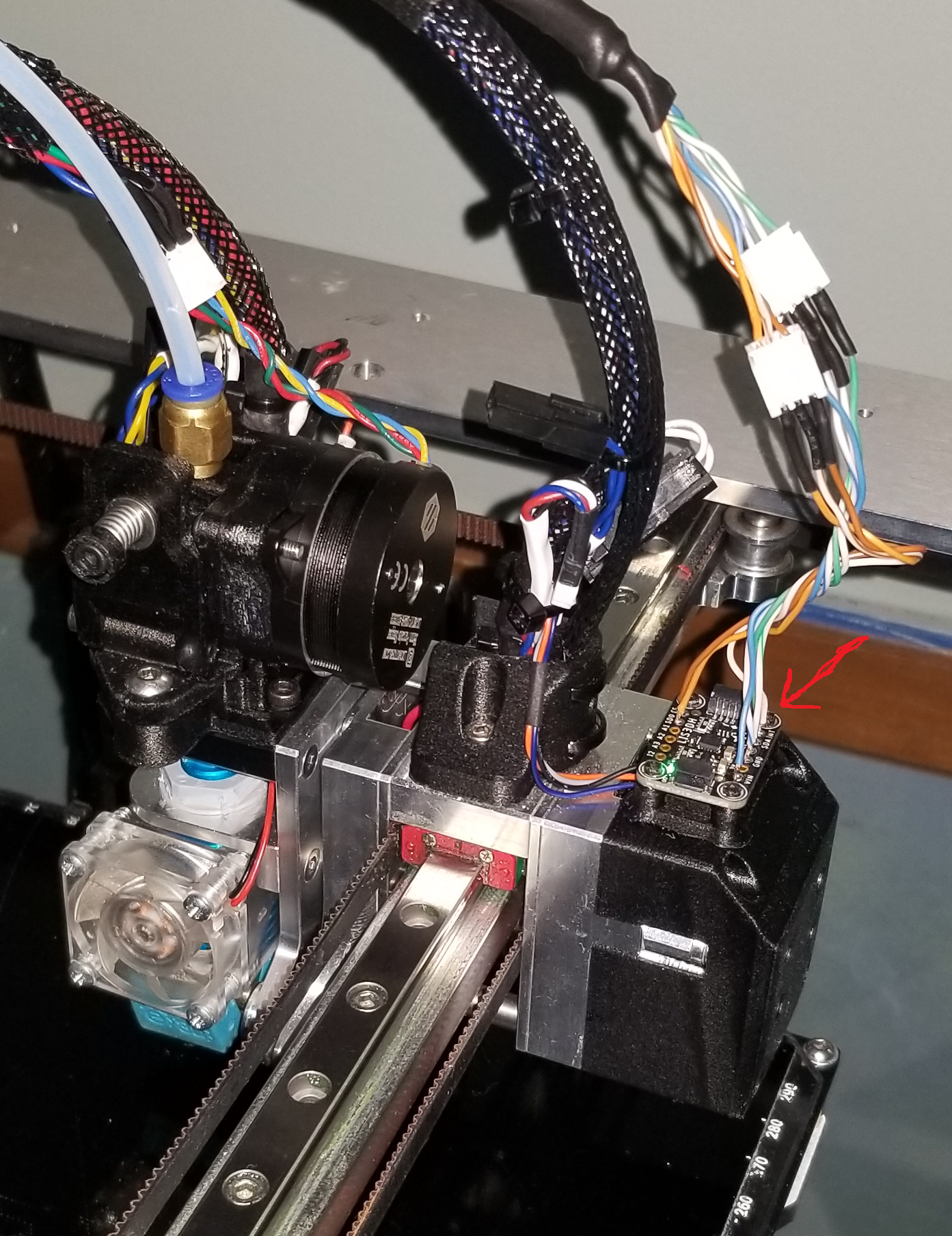
@dc42 I have my accelerometer set up on my tool changer. I mounted it like this:
Are any of the input shapers in the version you put into the dropbox?
Thanks!
-
@dc42 FWIW - I also am thinking that the table the printer is on vibrates. Could a second accelerometer could be used to measure the vibration of the printer frame and subtract it from the samples collected on the carriage? The accelerometer is measuring all vibrations, not just the vibrations of the carriage inside the printer frame. I know that samples would have to be synchronous, or perhaps asynchronous and the Fourier results of the frame vibration subtracted from the Fourier results of the carriage vibration?
-
Input shapers to generally have a range they reduce vibrations so it's not only a specific frequency they dampen but + / - x% from the specified input shaping frequency. Depending on the shaper the range is smaller or bigger.
Nevertheless it is possible to change the input shaping frequency during a print.The object "move.extruders[0].position" should display the total amount of filament used so far and with some conditional gcode in the daemon.g you should be able to achieve your goal.
-
@generisi said in Input Shapers: 2HUMP_EI & 3HUMP_EI + Auto Tuning:
I know that samples would have to be synchronous, or perhaps asynchronous and the Fourier results of the frame vibration subtracted from the Fourier results of the carriage vibration?
By using the same file for both tests, one could write a specific start- and end movement (a number of fast/short back and forth moves) which would allow to match the results. (*) The input shaper would have to search for these patterns...
*) calling a macro M98 P"ShakeItBaby.g"
-
@cncmodeller said in Input Shapers: 2HUMP_EI & 3HUMP_EI + Auto Tuning:
could there be a way to change the parameter during a print based on the amount of filament extruded?
Adding filament will change the frequencies, but it also depends where you put it. In case of a Cartesian, the layer height has an influence. In case of a Polar bed, even the distance from bed-center is important.
Then each layer of plastic adds a different amount of flexibility (PLA vs ABS, vs PETG)
It's impossible to digest all that in a theoretic shaper model.
Better measure online and correct on the fly -
Instead of input shaping, for global vibrations one could also create vibrations in opposite direction like a noise cancellation system for earphones. Maybe Piezo based, using LIS3DH as source of information.
-
@dc42 said in Input Shapers: 2HUMP_EI & 3HUMP_EI + Auto Tuning:
Yes, but perhaps not on the Duet Maestro because it doesn't have floating point hardware.

Boy, I really hope it doesn't pan out that way. I have been really looking forward to this feature on my Maestro. Accelerometer on the way.
-
I have a PT100 daughter board and my accelerometer is attached to my hot end assembly.
Could somebody point me in the direction of where to find how to connect the 2 boards and what changes are needed to config.g
Thanksappjaws - Core XYUV Duet Ethernet Duex5
firmware 3.5.0-rc.4 Web Interface 3.5.0-rc.4
Ormerod 1-converted to laser engraver, Duet wifi
OpenSCAD version 2024.03.18
Simplify3D 5.1.2 -
-
@appjaws for the connection via the daughterboard see:
https://forum.duet3d.com/topic/22904/duet-2-wifi-accelerometer-connection/1 -
Thanks for the help.
I am totally confused....(not hard)from the Wiki*****
Two further signals must be connected on the accelerometer breakout board: SPI CS, and INT1. The INT1 pin must be connected to a Duet pin with interrupt capability. This is what we suggest:On Duet WiFi, Duet Ethernet and Duet Maestro all the SPI CS pins have interrupt capability, so you can use any two spare CS pins on the daughter board connector. For example, on a Duet WiFi or Duet Ethernet you could connect the accelerometer CS pin to SPI.CS3, and the INT1 pin to SPI.CS4. Then use this command to tell RRF about it:
M955 P0 C"spi.cs3+spi.cs4"
I can not see any markings on my daughter board for SPI.CS3 or CS4
from the Wiki*****
To use a direct connection, connect the accelerometer MOSI (also called SDI), MISO (also called SDO), SCLK and GND pins to the corresponding pins on the SPI daughter board connector. You can also pick up +3.3V on the daughter board connector to feed to the Vcc pin of the accelerometer.
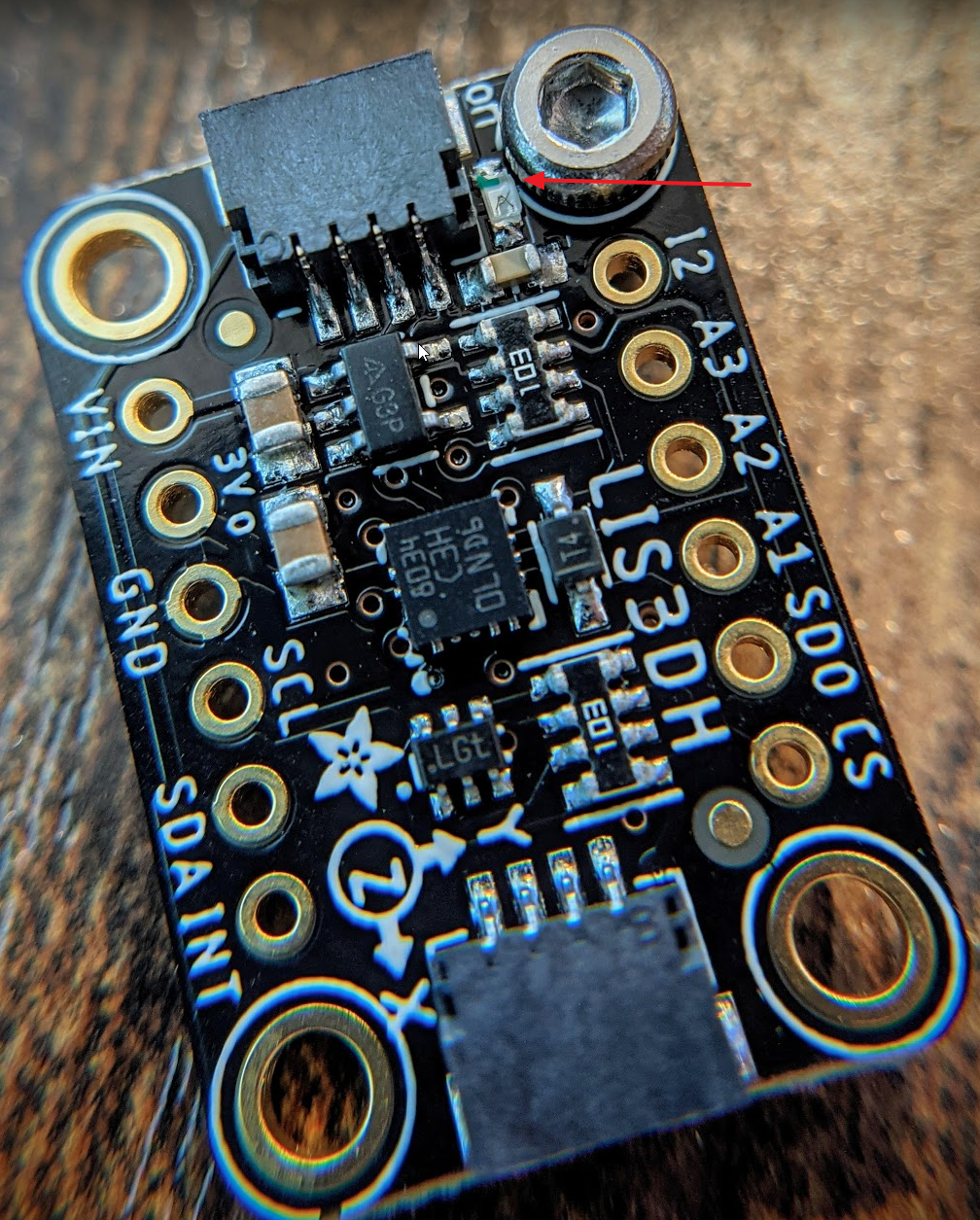
On the accelerometer the markings are:
I2,A3,A2,A1,SDO,CSVin, GND,SCL, SDA INT
So would SDI actually be SDA?
Would SCLK actually be SCL?
Where are the corresponding SCLK, GND, Vcc SDI,SDO, SPI.CS3, SPI.CS4 on the daughter board?I already have a PT100 connected to RTD1 on the daughter board
-
@appjaws Here is my wiring diagram I used when connecting to the daughter board header on the Duet2 - see important notes below about actually connecting to the daughter board itself.
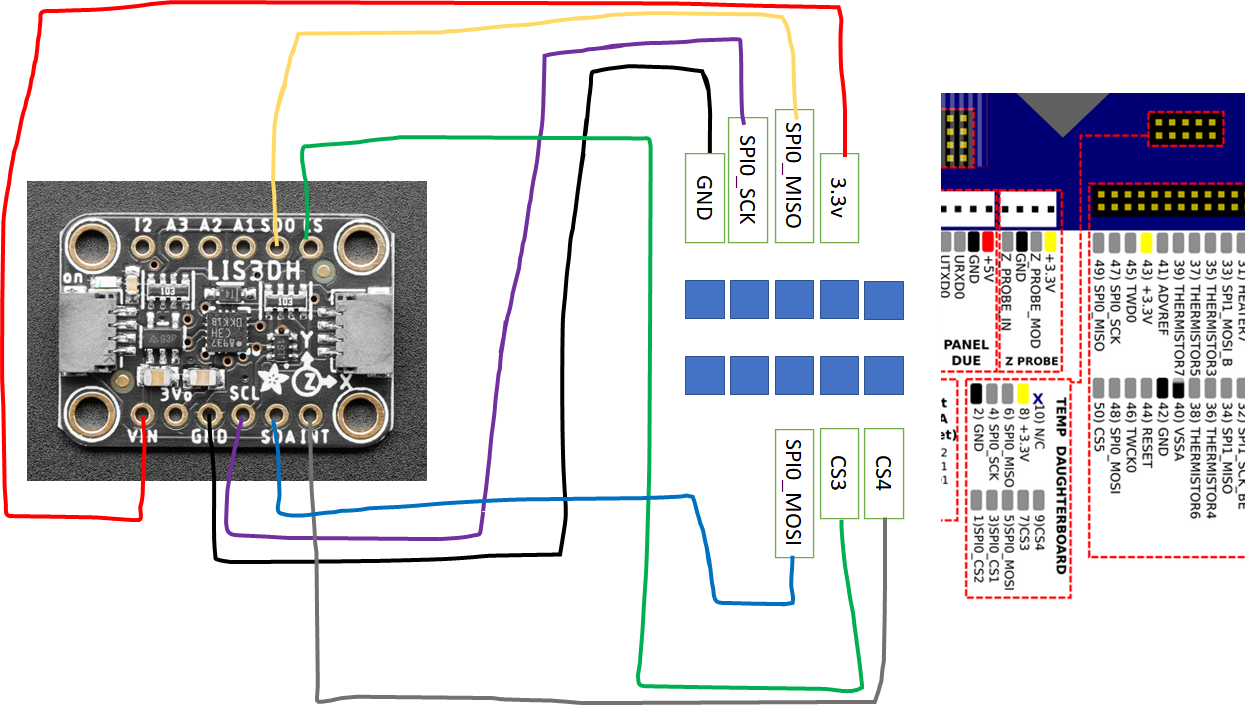
For the daughter board, I think the two key notes are
You would have needed to use spi.cs3 or spi.cs4(because spi.cs1 and spi.cs2 are used by the daughter board. Those pins are routed to the top of the daughter board on different pins (the pins that would be spi.cs1 and spi.cs2 respectively if those were routed straight through).
and
So when connecting via the daughterboard, I should connect cs to pin position 3, and int1 to pin position 1, to pick up cs3 and cs4?
Using M955 P0 C"spi.cs3+spi.cs4"
-
@sebkritikel perfect, thanks, I'll crack on in the morning.
-
@appjaws, the diagram posted by @sebkritikel is valid if you don't have a daughter board already plugged into the connector.
If you do have a single daughter board plugged in to it, then on the top of the daughterboard CS3 and CS4 are shifted 3 pins to the left in the above diagram. CS1 and CS2 are not available because the daughter board uses them.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
Accelerometer has arrived.
Man, this component is close to the mounting screw! Might have to grind down the head.
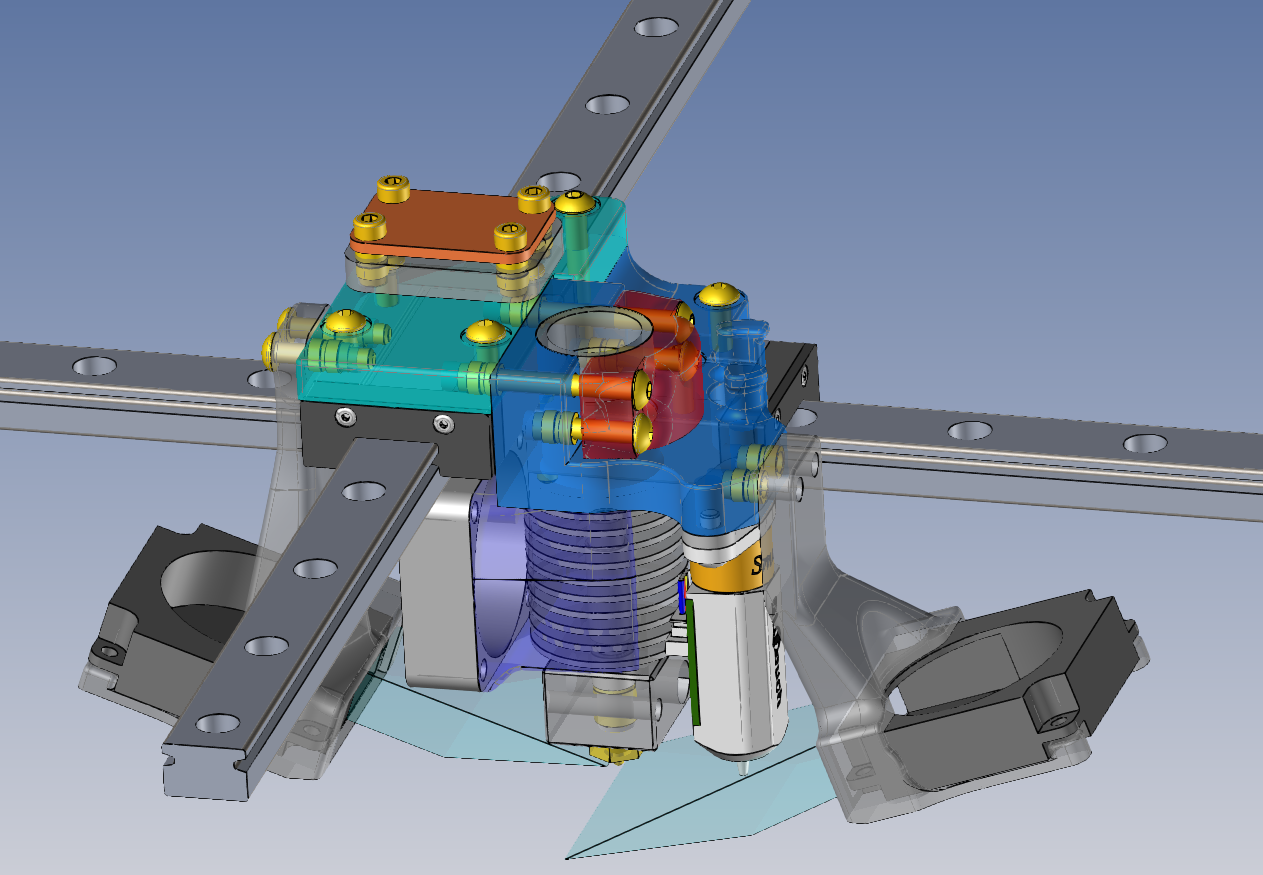
Have a nice mount for my carriage designed and ready to print:
@dc42 What are the odds input shaping makes it to the Maestro?
-
@ccs86 said in Input Shapers: 2HUMP_EI & 3HUMP_EI + Auto Tuning:
What are the odds input shaping makes it to the Maestro?
Not good, because the Maestro does not have hardware floating point.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 said in Input Shapers: 2HUMP_EI & 3HUMP_EI + Auto Tuning:
@ccs86 said in Input Shapers: 2HUMP_EI & 3HUMP_EI + Auto Tuning:
What are the odds input shaping makes it to the Maestro?
Not good, because the Maestro does not have hardware floating point.
That is super disappointing to hear. I was under the impression that it did: https://duet3d.dozuki.com/Wiki/Comparison_of_Duets_vs._other_32-bit_controller_boards
-
@ccs86, notice the difference in the link you posted between Maestro and Duet2, one is M4 and one is M4F.
https://en.wikipedia.org/wiki/ARM_Cortex-M#Cortex-M4 .
Sometimes the fine prints make a big difference.
")
-
@zapta said in Input Shapers: 2HUMP_EI & 3HUMP_EI + Auto Tuning:
@ccs86, notice the difference in the link you posted between Maestro and Duet2, one is M4 and one is M4F.
https://en.wikipedia.org/wiki/ARM_Cortex-M#Cortex-M4 .
Sometimes the fine prints make a big difference.
I was talking about this:
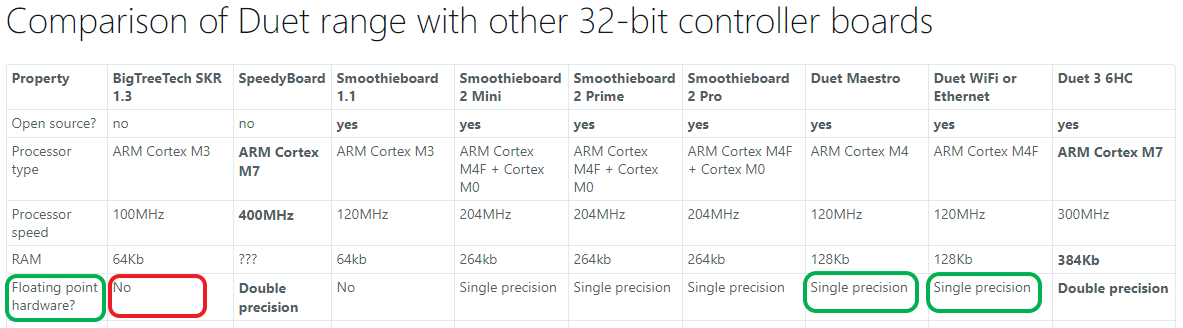
This reads to me as the Maestro having floating point hardware. So, when one of the most anticipated firmware features isn't likely to be supported on the Maestro because of a "lack of floating point hardware", it seems reasonable to be confused/disappointed.