Resonance, spreadCycle and stealthChop
-
@garethky said in Resonance, spreadCycle and stealthChop:
@dc42 thanks! Can you say what
T5inM915 P0 T5is actually doing?It's rather technical. See sections 5 and 6.7 of the TMC2660 datasheet. Unless you understand what you are doing, I suggest you remove that T5 parameter.
-
@garethky This is very interesting, can you confirm which drivers you are using (5160/2209/2660)? Having recently switched to 0.9 e3d steppers on a CoreXY I'd like to get rid of some of the noise as well!
@dc42 If/when you have have tuned a motor would it make sense to read the tuning values and then set them at startup (rather then tuning each time)? Is it possible with RRF to set all of the required register values (and which ones are they?).
-
@gloomyandy I'm using the Duet 3 with the
TMC2160TMC5160@dc42 removing the T5 parameter breaks the tuning! Nothing I have ever tried worked properly till I tried that suggestion.
WARNING: its smarter me from the future, everything below this line is WRONG! Leaving it here to demonstrate the confusion:
I'm technical
 . But even better, @Kolbi made a spreadsheet so we can have visual aids:
. But even better, @Kolbi made a spreadsheet so we can have visual aids: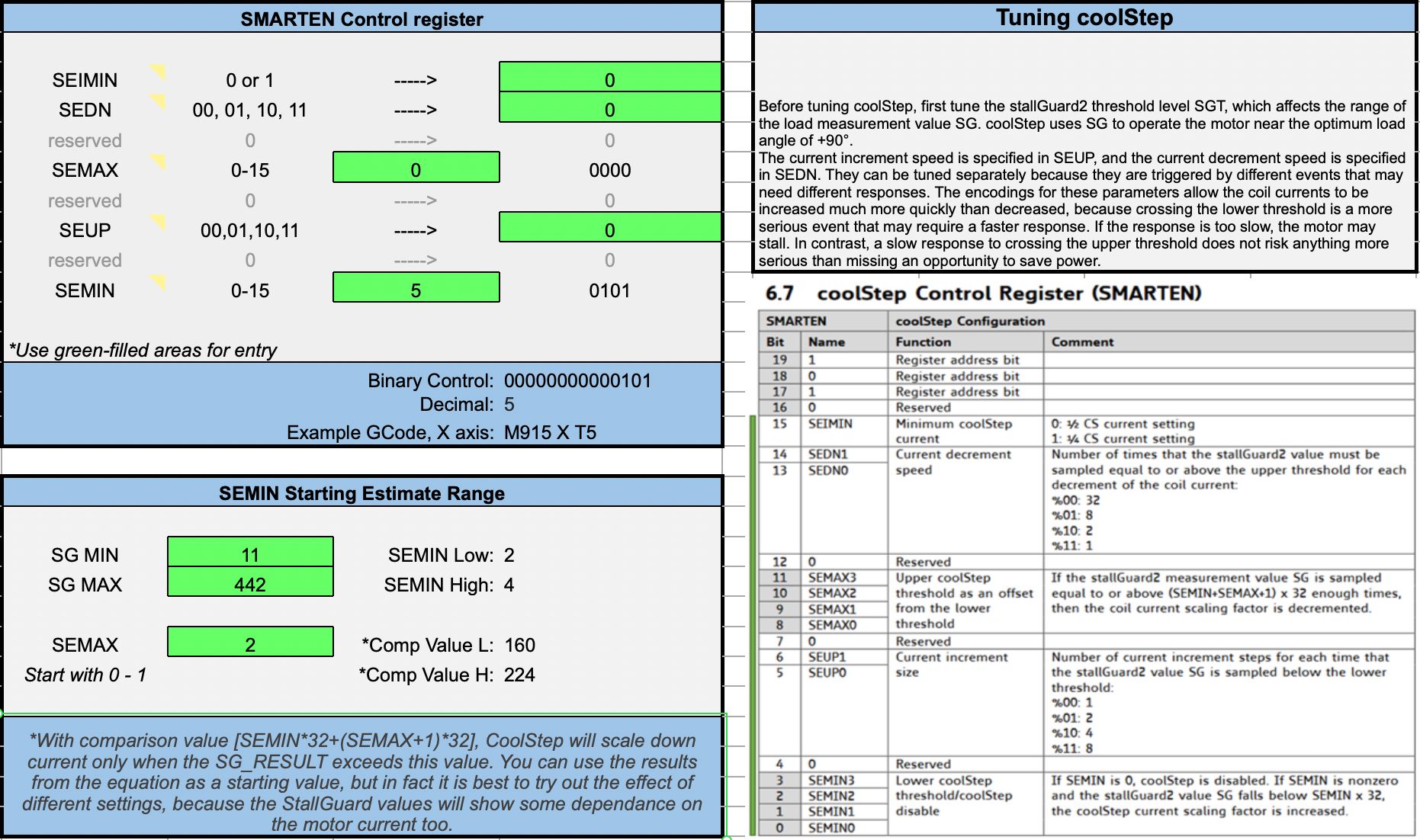
T5sets all of the bits related to Stall Guard to 0/off. But it sets SEMIN to 5 or really 160. My guess is that the important part is assigning all the stall guard fields to 0. The value 5 is probably something that should be tuned.My machine config has no other calls to M915 except for the C axis. So there is some voodoo here about writing zeros to that register that I don't see documented in the manual. Maybe its TMC2160 specific?
-
@dc42 I think the documentation is confusing people, me included, so I went to he source code:
Setting the T param on the 22XX chips does nothing:
https://github.com/Duet3D/RepRapFirmware/blob/7c571137d68a1a2de0d79e2dc1741793a96c7279/src/Movement/StepperDrivers/TMC22xx.cpp#L611Only the 51XX chip family writes the register:
https://github.com/Duet3D/RepRapFirmware/blob/7c571137d68a1a2de0d79e2dc1741793a96c7279/src/Movement/StepperDrivers/TMC51xx.cpp#L513The register it writes to is
TCOOLTHRSsee here. The documentation for M915 says that T sets the "CoolStep control register", which I think a whole lot of users assumed was the "CoolStep config register" referenced here. The config register is written to but only via the set stall detect threashold and set stall detection filer.So the calculator that people are using doesn't do what they think it does. There is no way to write all the bits of the CoolStep config registers with M915. Any large values supplied to the T parameter get truncated to 20 bits and shoved into
TCOOLTHRS. I don't think anyone pointed out this confusion.I think the documentation here and here should be updated to say that T writes to
TCOOLTHRS. The only accurate description of how this works is here.Also, my Duet3 board has 5160's, verified by inspection.
-
@garethky said in Resonance, spreadCycle and stealthChop:
After some more testing this is a mixed bag.
[snip]
I read your interesting report and it's exactly my experience. In real life printing I can't use switching from stealth to spread, jolts and lost steps... it's a nightmare. At "high" speed stealth is not usable, not just for the noise but it loses steps. Unfortunately that happens already at around 130mm/s (with my motors).
So honestly I don't know what else to do apart throwing more money into motors or trying a corexyuv.
Long story short, I don't think this is an issue that can be solved with stealthchop
-
@matt3o said in Resonance, spreadCycle and stealthChop:
I read your interesting report and it's exactly my experience. In real life printing I can't use switching from stealth to spread, jolts and lost steps... it's a nightmare. At "high" speed stealth is not usable, not just for the noise but it loses steps. Unfortunately that happens already at around 130mm/s (with my motors).
So honestly I don't know what else to do apart throwing more money into motors or trying a corexyuv.
Long story short, I don't think this is an issue that can be solved with stealthchop
Agreed. I'm happy that I got it to work but unhappy with being limited to 150mm/sec. I'd like to see 300 max when loaded with a tool and maybe 500 when no tool is loaded.
I'm going to try the 1.8 degree 2 Amp steppers that the Voron community are recommending. But that is the last stepper I'm going to mess with. Seeing the StealthChop results we know its not the mechanical system that's at fault.
-
@garethky said in Resonance, spreadCycle and stealthChop:
I'm going to try the 1.8 degree 2 Amp steppers that the Voron community are recommending.
if they are the Moons 1.8° 2A, don't do it, I have them, they are good but they don't solve the issue (you just move the resonance to a different frequency). Also to be really fair, I get a much better surface texture with 0.9° on my corexy.
-
Would it be possible to add a command to write directly to the driver control registers for those who know what they are doing? (I would love to kill my chips in experimenting, my system has two more drivers than I really need!
 )
) -
-
@matt3o said in Resonance, spreadCycle and stealthChop:
@garethky said in Resonance, spreadCycle and stealthChop:
I'm going to try the 1.8 degree 2 Amp steppers that the Voron community are recommending.
if they are the Moons 1.8° 2A, don't do it, I have them, they are good but they don't solve the issue (you just move the resonance to a different frequency). Also to be really fair, I get a much better surface texture with 0.9° on my corexy.
I have the Moons now. The Voron recommendation is the Stepper Online 17HS19-2004S1. I'm going with 1.8 because top speed is related to steps/second in the driver. I don't hold out much hope but it was cheap to try.
-
@garethky keep us posted!
-
@matt3o not sure if you've seen it before, but @Nxt-1 went through a lot of noise reduction stuff on his big delta a few months ago and did a very good job of writing it up. He even tried reinforcing the printer with concrete struts! In the end I think the maim source of noise was the motors themselves, so he got best results by fitting a torsional damper onto the motor shaft itself. I'm toying with the idea of getting some for my printer now too.
There's three long threads on it, but the final one sums it up best:
https://forum.duet3d.com/topic/18281/battling-sources-of-vibration-and-noise/82 -
@engikeneer thanks for the heads up, I'll have a look at that post, I made all kind of tests and I'm 99% sure the problem is with the motor shaft itself (not even the motor body). So what you say makes a lot of sense to me
-
So the StepperOnline 17HS19-2004S1, I'll admit I was skeptical. It doesn't sound any quieter in Stealth Chop mode, if anything its noisier. But in Spread Cycle, its significantly quieter and smoother than the Moons. So quiet that I think I could live with them in Spread Cycle mode in general and leave them on the printer. That's a big deal if you are on the Duet 2 and don't have access to Stealth Chop.
The other big difference is the low frequency rumble is greatly reduced.
I don't know why any of this is so?
The moons are 1.04 Ohm and 2.2mH
The Stepper Online motor is 1.4Ohm and 3.0mH -
@garethky I believe my problem is mostly the length of the belts. I have a 400x400 print area and belts are about 3m per side... but of course I could be wrong.
As you've probably seen in the video I posted the vibrations at 4000mm/m are really bad and I doubt new motors would solve the issue completely. But thanks for your report, they are rather inexpensive motors I might give them a try.
In the meantime I'm converting my corexy into a corexyuv. Shorter belts and motors don't play against each other. I think I'm gonna make the first XY test later today... wish me luck...
-
@matt3o said in Resonance, spreadCycle and stealthChop:
,..........In the meantime I'm converting my printer in a corexy into a corexyuv. Shorter belts and motors don't play against each other. I think I'm gonna make the first XY test later today... wish me luck...
I'm a bit confused by that. Did you really mean CoreXYUV or something else? It's just that a CoreXYUV use two gantries, stacked one above the other. So the belt lengths are the same (but you have more of them).
On the resonance thing, does it impact on print quality or are you simply trying to reduce the noise? If it's the former, there is a very simple solution.
-
@deckingman said in Resonance, spreadCycle and stealthChop:
I'm a bit confused by that. Did you really mean CoreXYUV or something else? It's just that a CoreXYUV use two gantries, stacked one above the other. So the belt lengths are the same (but you have more of them).
each gantry has it's own belts. So instead of 2x3m I have 4x1.2m and motors don't play against each other (I do not get resonance on diagonals).
@deckingman said in Resonance, spreadCycle and stealthChop:
On the resonance thing, does it impact on print quality or are you simply trying to reduce the noise? If it's the former, there is a very simple solution.
no, I don't care about the noise, it's a performance/quality issue.
-
@matt3o I'm also confused by what it is you are moving to. Can you post a diagram of the new belt layout? I assume your comment about not having resonance on diagonals refers to the "old" corexy setup?
-
@gloomyandy said in Resonance, spreadCycle and stealthChop:
I assume your comment about not having resonance on diagonals refers to the "old" corexy setup?
yes, on a corexy I don't get resonance on diagonals. In what I'm building I have individual X and Y axis so only one motor moves to go in straight lines.
This is an old picture but should give you an idea. (yeah to be honest I don't know what is the name of this config. I believe I've seen it referenced as corexyuv once).

-
@matt3o That ain't CoreXYUV. It looks like Cartesian with two X motors and two Y motors. If you try to run CoreXYYUV kinematics on that, bad things will happen.