Massive Vibrations with Duet3 & NEMA23 drives
-
First, very nice looking printer!
Second, at what print speed are you trying to print those perimeters? I see similar effects when trying to print curves at ~100 mm/s. I think it's because of belts not being rigid enough to change direction that fast.
With increased size of printer, comes increased weight. Could this be it? The added weight of the gantry of the larger model is causing the belts to produce such motion?
-
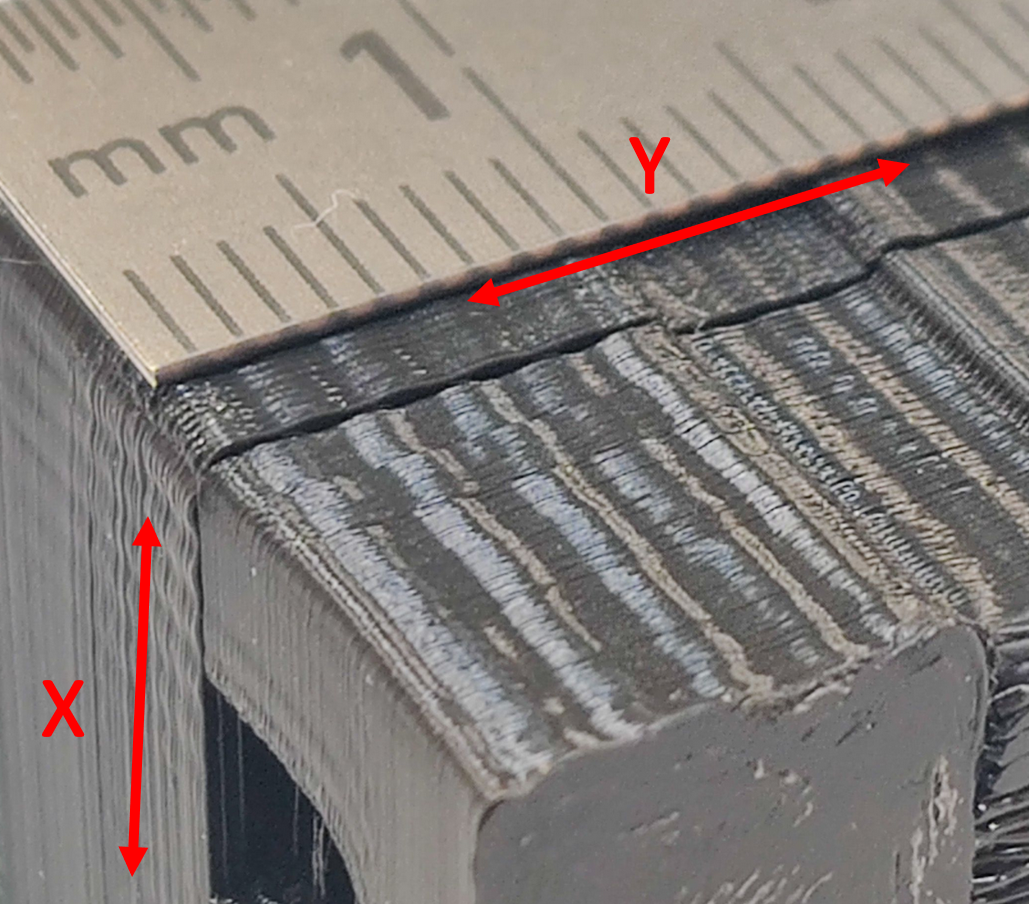
@CR3D I would check the pulleys of y (at stepper and at the other end) and extruder and that the stepper shafts are rotating round without vibration. The waves are 2 mm long, in x direction also, so I would check the extruder first.
Less probable your x gantry stucks every 2 mm (slow down and accelerate) because gantry is too stiff between the two y guides.
Maybe the bed vibrates, as the z linear guide is connected with the y guides. You should be able to see (or feel) it directly where is the reason.
Less probable is that the two y stepper have different properties (eg different pulleys) and fight each other.
-
I wonder if it's perhaps related to this: https://forum.duet3d.com/topic/18010/duet-3-stealthchop-2-tuning-for-nema23/3
-
First of all, thank you very much for your answers
")
@bot thanks for your compliment! Now if it would also print well everything would be great!

the perimeters were printed at approx. 60mm / s. the belts are very well tensioned at the moment.The pulleys really run very smoothly and evenly. These are very high quality pulleys from misumi for the 15mm gt3 belts (3mm Belt Pitch)
-> What do you mean with: "Less probable your x gantry stucks every 2 mm (slow down and accelerate) because gantry is too stiff between the two y guides." ?
What is to stiff?
@Phaedrux
Thank you for the link!Unfortunately, I don't quite understand the subject yet! Could someone help me with the parameter finding?
I use the motor from the data sheet above on the Y-axisIn addition to the bad surfaces, I have increased layer shifts in the Y direction!
I would be very grateful if you could help me!
Regards ChristianChristian from CR-3D
Homepage:
www.cr-3d.deFacebook:
https://www.facebook.com/cr3d.officialOur Discord Server
https://discord.gg/SxRaPNuRdAThingiverse Profile:
https://www.thingiverse.com/cr-3d_official/about -
@CR3D said in Massive Vibrations with Duet3 & NEMA23 drives:
What do you mean with: "Less probable your x gantry stucks every 2 mm (slow down and accelerate) because gantry is too stiff between the two y guides." ?
I mean, the X gantry is moving on two Y rails which have a specific distance. If this distance is too low or high or the gantry is tilted, the friction will be high and an uneven torque of the stepper/belt system will lead to uneven movement.
The distance can change through changed temperature e.g.
Less probable because I expect you checked that the gantry moves smoothly.I expect the solution is, if you find out where the 2 mm frequency comes from (visible in both x and y direction), you know the reason.
It's interesting that the belts are 3 mm, so they cannot be the reason.
The article https://hackaday.com/2020/08/19/re-imagining-the-crossed-gantry-3d-printer/ has a lot of useful information about ghosting in the user comments section.
-
-
Are you using a Duet 2 (WiFi or Ethernet) or Duet 3?
(asking just to double check, I see 'Duet 3' at the top of your config.g)I don't believe this is caused by your Nema23s. Nanotec makes nice stepper motors. I could see it being caused by having two steppers on two different drivers BUT I will not be diagnosing that, if it were the issue.
Do you note the Nema23s getting OVERLY hot (above the temperature in which the insulation would fail)? I run OrientalMotor Nema23s with similar specs (higher torque but lower inductance) and they stay cool to the touch at 2.4amps on a Duet 2. If using a Duet3 I would run your Nema23s at 2.4A, but thats your call (double check the calculations for your machine).
Which direction is the Y and X axes? Like the image below or the opposite?
If you had a theoretical object, say 500mm long in the Y axis, does this ripple/'vibration' occur for the entire 500mm length, or only the first 50mm? Can you feel the vibration?
I see no mention of M593, Dynamic Acceleration Adjustment in your config.g. I would recommend implementing that and reporting back.
-
@sebkritikel I have a Duet 3 and a Duet 2 Ethernet.
For my cartesion printer, I have: M593 F23, for my Duet 2 Ethernet and the prior Duet 085.
Currently don't have it set for my corexy that has the duet 3.
-
@Stephen6309 said in Massive Vibrations with Duet3 & NEMA23 drives:
@sebkritikel I have a Duet 3 and a Duet 2 Ethernet.
For my cartesion printer, I have: M593 F23, for my Duet 2 Ethernet and the prior Duet 085.
Currently don't have it set for my corexy that has the duet 3.
On my IDEX setup I have M593 ~F25 to combat ringing artifacts specifically as a result of ringing from the X and U axis.
-
Thank you for your response! The part was printed as your picture shows ....
I use the Duet 3 and I also think the problem is the firmware settings and not the steppers themselves ...
I can feel the ripple along the whole object ... that's that strange for me ...
the axes themselves run very smoothly and do not jam.
A change in the acceleration values can affect the shape of the waves ...
ok now i understand what you meant!
Yes, I've already checked it, the axes run very smoothly. The printed image occurs in a cold and in a warm state.
I have been building the mechanical structure for about a year. Cartesian with two separate Y-motifs. So far it has always been NEMA 17 motors and the Duet Wifi.
That was the reason why I first blamed the bigger motors or the other drivers.
I once read a post by @dc42, where he said NEMA 23 tend to vibrate.
on the subject of M593:
How do you find the Find the right frequency?
Christian from CR-3D
Homepage:
www.cr-3d.deFacebook:
https://www.facebook.com/cr3d.officialOur Discord Server
https://discord.gg/SxRaPNuRdAThingiverse Profile:
https://www.thingiverse.com/cr-3d_official/about -
@CR3D said in Massive Vibrations with Duet3 & NEMA23 drives:
I once read a post by @dc42, where he said NEMA 23 tend to vibrate.
What I think I said, which was based on something I had read elsewhere, was that when designing a stepper motor there is a balance to be had between smoothness of microstepping (i.e. how consistent the size of each microstep is) and torque; and that Nema 17 motors were typically designed to favour smooth microstepping, whereas Nema 23 motors were typically designed to favour maximum torque.
All stepper motors suffer from mid-band resonance, which is caused by the inherent elasticity of the magnetic forces combined with the rotor inertia. However, mid-band resonance tends to occur at travel speeds, not printing speeds.
I suggest the following test. Print a long wall along the X or Y direction, which slopes back by 1mm for every 5mm of height. Change the print speed by a significant amount (e.g. halve it) after you have printed 10mm of height. Does the pattern continue over the whole length of the wall, or is it stronger at the starting end? Is the pattern vertical, or has the slight slope changed it to that it runs diagonally? Does the spacing in the pattern change when the print speed changed?
-
that is a 2mm pitch. are your belts 2mm pitch as well?
maybe running tooth belt on a smooth idler.
-
@Veti they are GT3 3 mm belts, please see above.
-
@CR3D said in Massive Vibrations with Duet3 & NEMA23 drives:
Thank you for your response! The part was printed as your picture shows ....
I use the Duet 3 and I also think the problem is the firmware settings and not the steppers themselves ...
I can feel the ripple along the whole object ... that's that strange for me ...
the axes themselves run very smoothly and do not jam.
A change in the acceleration values can affect the shape of the waves ...
ok now i understand what you meant!
Yes, I've already checked it, the axes run very smoothly. The printed image occurs in a cold and in a warm state.
I have been building the mechanical structure for about a year. Cartesian with two separate Y-motifs. So far it has always been NEMA 17 motors and the Duet Wifi.
That was the reason why I first blamed the bigger motors or the other drivers.
I once read a post by @dc42, where he said NEMA 23 tend to vibrate.
on the subject of M593:
How do you find the Find the right frequency?
Unfortunately I cannot find where it was written, but if the picture is as you say, the ripples are likely not caused by the Y stepper motors, but the the movement of the print head wobbling parallel to the X axis while the gantry moves down the Y axis.
Please run the test DC42 recommended and report back to us.
For specifically M593:
'To measure the ringing frequency, take a print that exhibits ringing on the perimeters (for example a cube), preferably printed single-wall or external-perimeters-first. Divide the speed at which the outer perimeter was printed (in mm/sec) by the distance between adjacent ringing peaks (in mm). When measuring the distance between peaks, ignore peaks close to the corner where the ringing started (these peaks will be spaced more closely) because the print head will have been accelerating in that area.'If the perimeter is 60mm/s, and the 'waves' are 2mm pitch, 60mm/s / 2mm = 30 1/s, so "M593 F30; frequency 30hz"