Duet3D System won't turn on now
-
@Jim46 if you mean the config tool, the link is working for me. Should work in any browser.
Ian
-
Thanks Ian, just tried it on Chrome and it opened up! I'll try to follow the
https://duet3d.dozuki.com/Wiki/ConfiguringRepRapFirmwareCartesianPrinter
Jim -

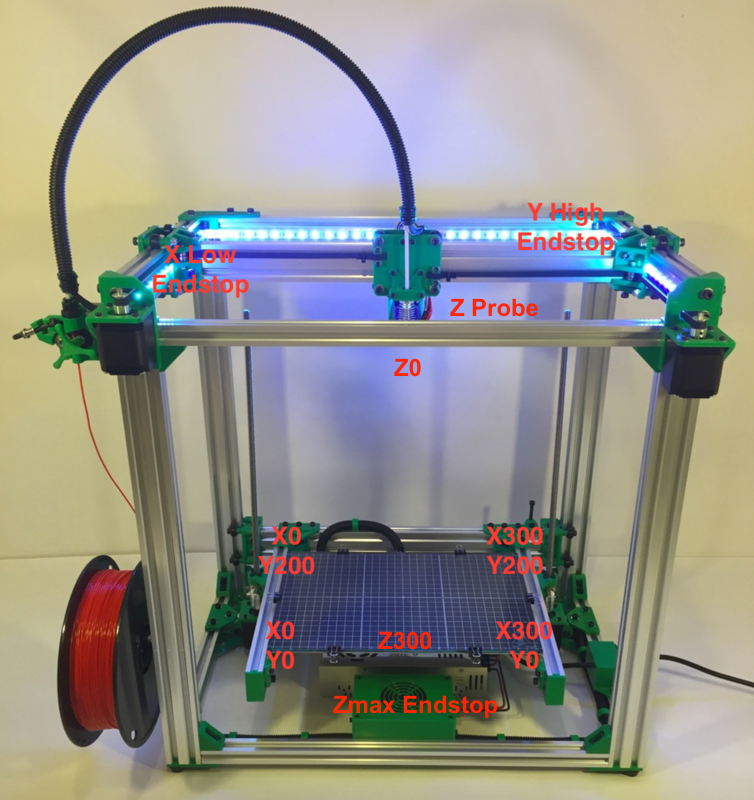
As mentioned at 15:04 April 5, Here is the Duet powered by the Rpi4. It also has the 24v PS on too. The light just to the left of the microSD slot, is flashing about once a second. What is it? I'm unable to find it named anywhere. Thanks, jim
-
If you have VIN connected as well, can you unplug the USB and see if the LED goes out. Perhaps it's indicating 5v power via USB, but that's speculation on my part.
-
Hello All,
hope you are well!
I'm trying to setup the config-reprap. My NEMA 23 high torque stepper motors are 1.8 degree +/-5%. This is a belt drive system using 2 motors on the X-axis (front to back motion carrying 2 Z beams), 1 motor on Y axis (left to right motion for the extrude head carrying load), and 2 motors on the Z-axis (up and down motion for the Y beam). The pulley is a 20 tooth GT3 (GT2-3M), Pitch 3 mm. The belt is GT3 (GT2 - 3M) with Pitch 3mm.
I believe this means one tooth goes by each 3mm.
Then 16 microsteps/whole step x 200 step/revolution + 3200 microsteps/revolution of motor.
then 20 teeth x 3mm/tooth = 60 mm travel/motor revolution.
and 3200 microsteps/60 mm per microstep = 53.3333 microsteps/mm of travel.

I think I have the motors input ok. Is that true? I notice the Max. Speed Change (mm/s) is different for the Z -axis. Why and why aren't they equal? This is my first time doing this. Thanks again,PS Phaedrux thanks for your comment on the LED light question. I'll try it. Is it a warning light?
-
@Jim46 said in Duet3D System won't turn on now:
This is a belt drive system using 2 motors on the X-axis (front to back motion carrying 2 Z beams), 1 motor on Y axis (left to right motion for the extrude head carrying load),
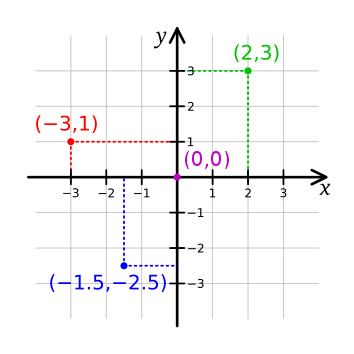
Traditionally the X axis would be considered the left/right motion and the Y axis would be front/back. That way when looking at the "front" of the printer you have a right hand coordinate system that matches what the slicers use. This ensures prints don't come out mirrored. Here are some photos that illustrate that.
@Jim46 said in Duet3D System won't turn on now:
Then 16 microsteps/whole step x 200 step/revolution + 3200 microsteps/revolution of motor.
then 20 teeth x 3mm/tooth = 60 mm travel/motor revolution.
and 3200 microsteps/60 mm per microstep = 53.3333 microsteps/mm of travel.Here is the formula for a belted axis.
xy_steps_per_mm = (motor_steps_per_rev ∗ driver_microstep) / (belt_pitch ∗ pulley_number_of_teeth)And it matches the 53.3 repeating steps per mm you've found.
It's far more common to use 2mm pitch belt so that you end up with a nice round steps per mm value. In your case you can use more than just 2 decimal places in config.g when setting the steps per mm value in M92 to gain some more precision. Changing out the belts and pulleys for 2mm may or may not be worth it to you at this point.
@Jim46 said in Duet3D System won't turn on now:
I think I have the motors input ok. Is that true?
See my comment about X and Y above and consider changing your assignments.
@Jim46 said in Duet3D System won't turn on now:
I notice the Max. Speed Change (mm/s) is different for the Z -axis. Why and why aren't they equal?
The Z axis is typically a much slower axis since it's either lifting/lowering a heavy bed, or is raising/lowering the X and/or Y axis. It also only has to move a very short amount during layer changes. The Z jerk is set very conservatively in the configurator to prevent any unintentional damage during commissioning. It will be up to you to do some testing to find out what your acceptable settings are.
At this point I might suggest creating a new thread with any further commissiong questions since the purpose for this one has now been resolved and is nearly 100 posts long. You'll get more eyeballs with a new post and new title.
-
@Jim46 The flashing light is the DIAG light. It flashes to show the firmware is running. It's perfectly normal. If you remember back to when your Duet wasn't working, this was the LED that was only very dimly lit, indicating the firmware had been deleted!
53.333 steps per mm sounds correct for the belts. But does your Z run on belts too? Most Z axis run on leadscrews, and the steps per mm will be different. If it does run on the same belts, then yes, that should be the same as X and Y. The config tool usually assumes the Z will run on leadscrews, so sets the motor settings for this. You can change them to the same as X and Y if you're running a belt Z axis.
If you are running leadscrews, but you don't know what they are or how many steps per mm to set them to, post a picture of the leadscrew with a ruler next to it, and try and measure the diameter. Also take a picture of the opn end of the leadscrew (ie not the one connected to the motor), as this will show how many 'starts' it has.
Ian
-
Hi Ian,
It was explained to me that my machine was too big for lead screws due to whip lash, so the whole machine is belt driven.
I'm going to open a new thread on commissioning a new custom machine.
Jim -
After updating from 3.0-RC2 to 3.01-RC8, "dcs not available", same error.
(uploaded Duet3Firmware_MB6HC.bin on Webmenu / System).Repaired with:
wget -q https://pkg.duet3d.com/duet3d.gpg
wget -q https://pkg.duet3d.com/duet3d-unstable.list
sudo mv duet3d.gpg /etc/apt/trusted.gpg.d/
sudo mv duet3d-unstable.list /etc/apt/sources.list.d/duet3d-unstable.list
sudo chown root:root /etc/apt/trusted.gpg.d/duet3d.gpg
sudo chown root:root /etc/apt/sources.list.d/duet3d-unstable.list
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install with --reinstall duetsoftwareframeworkTested with:
apt list 2>/dev/null | grep duet | awk -F'[/ ]' '{print $1" "$3 }'Output:
duetcontrolserver 2.0.0
duetruntime 2.0.0
duetsd 1.0.6
duetsoftwareframework 2.0.0
duettools 2.0.0
duetwebcontrol 2.1.3
duetwebserver 2.0.0Thanks to everyone in this forum, solved it through you.
-
@Razurel said in Duet3D System won't turn on now:
Thanks to everyone in this forum, solved it through you.
Please clarify: is this problem now solved? If so, please use the Topic Tools button to select "Ask as question", then again to select "Mark as solved".
-
(That wasn't the original poster)
-
@bearer I have tried to recover a DUET3 6HC with the help of your script, but it fails half way through the process. It correctly detects and identifies the board and connects to it, however then after a while I get a similar
SAM-BA operation failederror as you mentioned earlier.When trying on a windows machine with bossa I am able to read an image to a file as well as verify an image, but when I try to write an image it does not progress.
Any Idea what could be wrong?
-
@too You may need to use the erase jumper a few times to make it writable. I'm not sure why, but it can take a few attempts.
-
@too Seems to be a potential bug in the bossa that only triggers with the new cpu in the Duet3.
Is it reproducable on the Pi? If so I'd like you to try a patched bossa version (been unable to build a windows binary, but the linux one is easy).
Create a new topic and I'll get to the instructions when i find time, busy week this week, but i'll try to squeeze it in if noone beats me to it.
pull request to test https://github.com/shumatech/BOSSA/pull/121
(alternatively you could try the SAM-BA software from microchip/atmel)
-
Alright, thanks for the quick response. I'll give it a shot over the weekend and will update with the results.
