Clarification on stepper motor resistance, voltage, inductance
-
I've read the guide on choosing stepper motors and understand you want to aim for low resistance, low inductance, low rated voltage, and a higher rated current.
Is it possible to overdo that guidance and find a motor that has too low of the above specs? Are there any drawbacks and what type of behaviors would result from it? For example, would the motor operate worse at low speeds therefore inducing vibrations? Is there a sweet spot we should be aiming for etc? My printer is a Voron 2.4 using a 6HC plus a toolboard.
Here is an example of a motor I found. Almost seems too good to be true when using the emf calculator
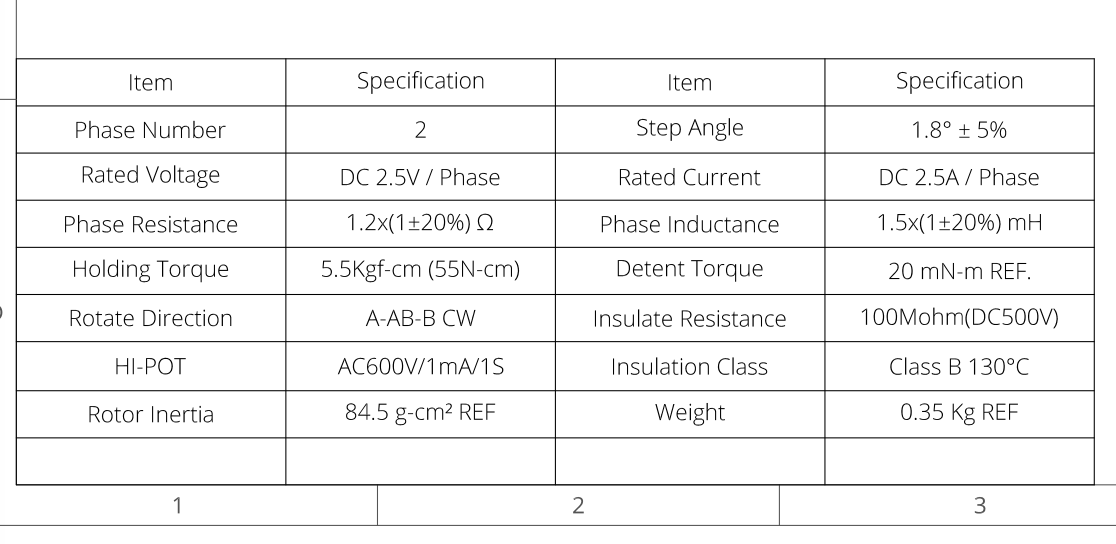
-
@ctilley79 said in Clarification on stepper motor resistance, voltage, inductance:
Voron 2.4
I would suggest you find a motor kit for a Voron from someone like LDO and call it a day. They've done all the hard work for you.
-
@Phaedrux I’ve had this machine for 2 years. I love to tinker and experiment. Mainly asking for knowledge not support.
-
@ctilley79 those look like the specs for the 2504 motors from LDO. Seem to work well on mine. I have run quiet a few fast prints with them. Mine runs well. I did get encoders fitted and have yet to tune them but open loop they are good. VZBot used them until they released some other ones for them
-
@samlogan87 Are you running a Duet 3 6XD?
-
@ctilley79 yes, that motor looks good for driving from a 6HC board.
-
@ctilley79 no. I am running the 1HCL boards on them