Compensation in DWC always NONE - why?
-
Hi,
I ran into a strange problem, since after executing G32, the webinterface does not show that any compensation is in use??What do I have to do that it shows BED, since if I load my mesh is says Mesh.
This is after G32 - NONE
I use 2 Probes finally, since i got such a messed up bed heightmap after BLTOUCH. Now I use basically a switch for probing the bed to get real measurements.
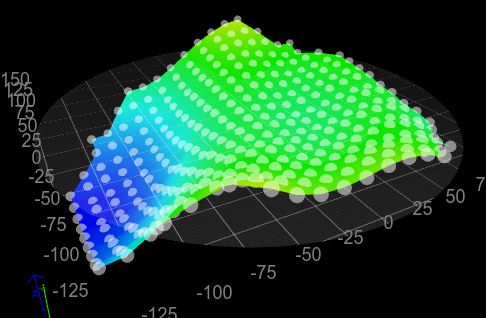
Measurements with K1 -BLTOUCH
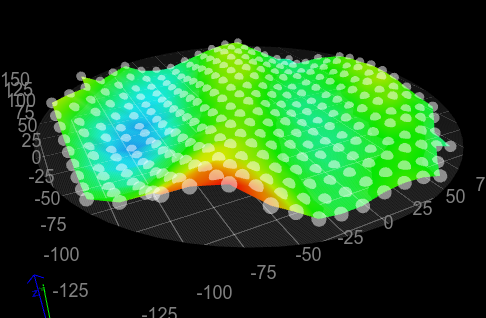
Measurements with simple touch switch
I don't know what the problem is anymore since if I use K0 or K1 as probe ... BLTOUCH always deploys and retracts if it was used even if it supposed to be sitting still. I have no Idea if that needs to be like that either?
I tried to remember it did it sometimes before I upgraded to 3.4.
Please enlight me.
Well I still try to get a solid first print (first layer) out of the machine... not happeningall the best
bed.g - my G32 exec
M190 S65 ;G4 S180 ; Pause 3min to thouroughly heat bed M561 ; clear any bed transform, otherwise homing may be at the wrong height G28 G1 X0Y0Z15 F15000 M291 R"NOZZLE SENSOR REQUIRED" P"CONNECT NOZZLE SENSOR NOW AND PRESS OK" S3 ;G1 X0 Y0 Z50 F15000 ; get the head out of the way of the bed ;M401 G30 P0 X0.00 Y130.00 Z-99999 H0 K0 G30 P1 X112.58 Y65.00 Z-99999 H0 K0 G30 P2 X112.58 Y-65.00 Z-99999 H0 K0 G30 P3 X0.00 Y-130.00 Z-99999 H0 K0 G30 P4 X-112.58 Y-65.00 Z-99999 H0 K0 G30 P5 X-112.58 Y65.00 Z-99999 H0 K0 G30 P6 X0.00 Y65.00 Z-99999 H0 K0 G30 P7 X56.29 Y32.50 Z-99999 H0 K0 G30 P8 X56.29 Y-32.50 Z-99999 H0 K0 G30 P9 X0.00 Y-65.00 Z-99999 H0 K0 G30 P10 X-56.29 Y-32.50 Z-99999 H0 K0 G30 P11 X-56.29 Y32.50 Z-99999 H0 K0 G30 P12 X0 Y0 Z-99999 K0 S9 ;M402 ;M402 ; retract the Z probe G1 X0 Y0 Z150 F15000 ; get the head out of the way of the bedconfig.g
; Configuration file for testing Duet Ethernet and Wifi M575 P1 S1 B57600 ; enable support for PanelDue M550 P"Monstaprint" ; Machine name and Netbios name (can be anything you like) ; Network M552 P0.0.0.0 S1 ; enable network and acquire dynamic address via DHCP M586 P0 S1 R80 ; enable HTTP on Port80 M586 P2 S1 ; enable Telnet ; General preferences M665 R170 L397.19 B155 H525 ; set delta radius, diagonal rod length, printable radius and homed height M666 X0 Y0 Z0 ; put your endstop adjustments here ; Drives M569 P0 S1 ; Drive 0 (X) goes forwards M569 P1 S1 ; Drive 1 (Y) goes forwards M569 P2 S1 ; Drive 2 (Z) goes forwards M569 P3 S0 ; Drive 3 (E0) goes backwards M584 X0 Y1 Z2 E3 ; X on motor0, Y on motor1, Z on motor2, E0 on motor4 M350 E128 I0 ; Configure microstepping without interpolation M350 X128 Y128 Z128 I0 ; Configure microstepping with interpolation M92 X640 Y640 Z640 E1100 ; Set steps per mm M566 X1500 Y1500 Z1500 E1500 ; Set maximum instantaneous speed changes (mm/min) M203 X12500 Y12500 Z12500 E7500 ; Set maximum speeds (mm/min) M201 X1000 Y1000 Z1000 E1000 ; Set accelerations (mm/s^2) M906 X1600 Y1600 Z1600 E1250 I35 ; Set motor currents (mA) and motor idle factor in per cent ; Endstops M574 X2 S1 P"xstop" ; X min active high endstop switch M574 Y2 S1 P"ystop" ; Y min active high endstop switch M574 Z2 S1 P"zstop" ; Z min active high endstop switch ; Z-Probe - BLTouch M950 K1 S0 C"exp.heater7" ; create servo pin 0 for BLTouch M558 K1 P9 C"^zprobe.in" H5 F1500:150 T5000 A2 ; set Z probe type to bltouch and the dive height + speeds G31 K1 X0 Y20 Z1.435 P50 ; Z probe trigger value, offset in relation to nozzle. And trigger height adjustment 1.44 Worked well ; Z-Probe - Nozzle M574 K0 E0 P"nil" ; (RRF 3.0 on Duet 2 ONLY) no Z endstop switch, free up Z endstop input M558 K0 P5 C"!^e1stop" H5 F1000:250 T10000 A2 G31 K0 X0 Y0 Z0.25 P30 ; Z probe trigger value, offset in relation to nozzle. And trigger height adjustment M557 R150 S15 K0 ; Define mesh grid Nozzle Sensor ; M557 R150 S15 K1 ; Define mesh grid BLTOUCH; ; Bedheater M308 S0 P"bedtemp" Y"thermistor" T100000 B4138 ; sensor 0 ### R4700 M950 H0 C"bedheat" T0 ; create bed heater and map sensor 0 M140 H0 ; the bed heater is heater 0 M301 H0 S1.00 P10 I0.1 D200 T0.4 W180 B30 ; Use PID on bed heater (may require further tuning) - old allowed to stay M140 S65 R0 ; set bed temperature to 65C and bed standby temperature to 20C M144 S0 ; activate standby temperature ;Hotend M308 S1 P"e0temp" Y"thermistor" T100000 B4607 C8.950070e-8 R4700 ; sensor 1 M950 H1 C"e0heat" T1 ; create heater and map sensor 1; Tools M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit M143 H1 P0 S280 A2 ; switch off heater 1 temporarily if it exceeds 280°C M143 H1 P1 S290 A0 ; raise a heater fault if it exceeds 290°C ; Fan Modes M950 F1 C"fan0" ; Fan 0 definition M950 F0 C"fan1" ; Fan 1 definition M106 P1 T40 H1 ; Turn on Fan0 if Heater Temperature is above 40°C M106 P0 S0 H-1 ; Set fan 1 value, PWM signal inversion and frequency. Thermostatic control is turned off ; Tools M563 P0 D0 H1 F0 S"Extruder" ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R120 S0 ; set initial tool 0 active and standby temperatures to 120C M280 P0 S160 I1 ; Clear any Alarms of BLTOUCH M579 X1Y1Z1 ; Axis scaling factor M501My M122
M122 === Diagnostics === RepRapFirmware for Duet 2 WiFi/Ethernet version 3.5beta2 (2023-02-08 17:41:22) running on Duet Ethernet 1.02 or later Board ID: 08DDM-9FAM2-LW4SD-6J9F4-3SN6M-92ZVY Used output buffers: 1 of 26 (26 max) === RTOS === Static ram: 22216 Dynamic ram: 70800 of which 0 recycled Never used RAM 19808, free system stack 188 words Tasks: NETWORK(ready,30.0%,233) HEAT(notifyWait,0.0%,315) Move(notifyWait,0.0%,361) MAIN(running,69.3%,496) IDLE(ready,0.6%,30), total 100.0% Owned mutexes: === Platform === Last reset 00:02:19 ago, cause: software Last software reset at 2023-03-06 08:35, reason: User, Gcodes spinning, available RAM 19320, slot 2 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0041f000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a Error status: 0x04 Aux0 errors 0,0,0 Step timer max interval 0 MCU temperature: min 23.4, current 24.7, max 25.2 Supply voltage: min 24.1, current 24.3, max 24.4, under voltage events: 0, over voltage events: 0, power good: yes Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0 Events: 0 queued, 0 completed Driver 0: standstill, SG min n/a Driver 1: standstill, SG min n/a Driver 2: standstill, SG min n/a Driver 3: standstill, SG min n/a Driver 4: standstill, SG min n/a Driver 5: Driver 6: Driver 7: Driver 8: Driver 9: Driver 10: Driver 11: Date/time: 2023-03-06 08:37:59 Cache data hit count 4294967295 Slowest loop: 10.08ms; fastest: 0.19ms I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0 === Storage === Free file entries: 10 SD card 0 detected, interface speed: 20.0MBytes/sec SD card longest read time 0.7ms, write time 0.0ms, max retries 0 === Move === DMs created 83, segments created 0, maxWait 0ms, bed compensation in use: none, comp offset 0.000 no step interrupt scheduled === DDARing 0 === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters 0 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 === GCodes === Movement locks held by null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 Daemon is idle in state(s) 0 Autopause is idle in state(s) 0 Q0 segments left 0 Code queue 0 is empty === Network === Slowest loop: 10.47ms; fastest: 0.02ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) HTTP sessions: 2 of 8 Interface state active, link 100Mbps full duplex -
@SetraX G32 is not used for mesh bed compensation (unless you use a G29 command within bed.g). It is used for calibration of the delta parameters on a delta machine, and for true bed levelling (not compensation) on Cartesian and Core machines.
-
You've created a heightmap based on the photos, but you don't have it loaded when you've sent M122. It's only loaded after creating a fresh one with G29, or loading a saved one with G29 S1.