Coming soon: Accelerometer Support
-
@jay_s_uk rats.

I'm designing the mount for the accelerometer, and now I'm trying to understand the "Inn" orientation parameter for M955. It's not quite clear how to determine the correct value. I have a core xy (BLV cube) and I'm looking to orient the board 90 degrees from what the board symbol shows, which would otherwise align with the printer x/y axis. So if the "default" is 21, I'm not sure what it would be if I rotated the board clockwise 90 degrees.
-
@nuramori, the documentation was wrong. The default (which corresponds to the chip axes lining up with the machine axes) is 20, not 21.
When you rotate the chip, if chip +Z is still up then the first digit 2 doesn't change. The second digit will be 1 if the chip +X direction faces the machine +Y direction, or 5 if it faces machine -Y.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 aaaah, I get it now, thanks! The silkscreen arrow on the adafruit board helps put that together.
-
@nuramori said in Coming soon: Accelerometer Support:
I'm designing the mount for the accelerometer..
Is the accelerometer supposed to be mounted permanently or just used one time to measure the reassurance frequency(s) of the system?
-
@zapta My understanding it's providing real time or near real time feedback that's taken into account for all movement. So in short, a permanent part of the system.
-
@nuramori on klipper its a run once and remove from the system thing until you change something.
not sure if it will be used in the same way here or not -
@jay_s_uk said in Coming soon: Accelerometer Support:
@nuramori on klipper its a run once and remove from the system thing until you change something.
not sure if it will be used in the same way here or notMy understanding is also that it's a run once to characterise the resonance of the printer.
Input shaping is an open loop approach as far as I understand.
However, the accelerometer needs to be rigidly secured to the print head to accurately measure the printers characteristics so a dedicated mount IMO is a good idea.
That's not to say we won't find other uses for an accelerometer in the the future of course!!
-
My soon to be installed Sammy/LIS3DH combo.

-
@nuramori said in Coming soon: Accelerometer Support:
My soon to be installed Sammy/LIS3DH combo.
That's nice, I've got an order in for a couple of duet Sammy boards from Germany. Looking forward to having a play with my Duet 3 mini.
-
So would the accelerometer be mounted to the frame or motor? Does its position matter for it to read any ringing frequency.
This article is interesting:
https://www.omega.com/en-us/resources/accelerometershttps://www.pcb.com/resources/technical-information/mounting
-
@aprz said in Coming soon: Accelerometer Support:
So would the accelerometer be mounted to the frame or motor?
It would be mounted on the print head. For a bed slinger, you would also need to take measurements with it mounted on the bed.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
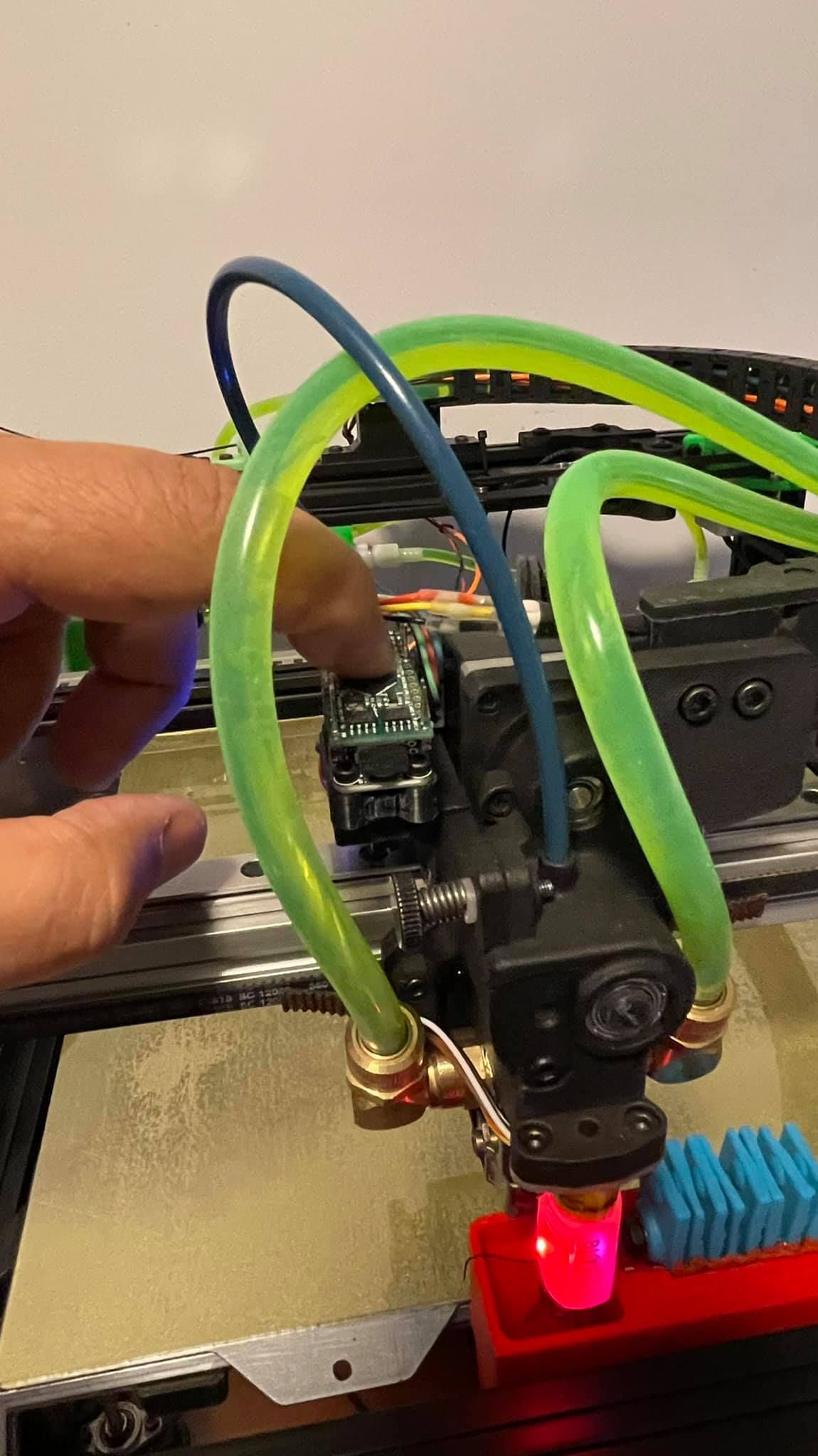
@aprz This is how/where I'm mounting mine...
-
@nuramori

I like your silicone-sock wiper")
-
@dc42 said in Coming soon: Accelerometer Support:
@aprz said in Coming soon: Accelerometer Support:
So would the accelerometer be mounted to the frame or motor?
It would be mounted on the print head. For a bed slinger, you would also need to take measurements with it mounted on the bed.
@dc42 Given the bed on a bed slinger increases in mass during a print would it be beneficial to alter the ringing frequency during the print to account for the print mass?
If so I guess we could embed input shaping gcode in the print file or something like that.
Perhaps enter the total print mass at the start of a print and profile the shaping based on % complete and a survey of frequencies across a print mass range.
Interesting
 stuff...
stuff...Polar Duet3 Mini + 1HCL
https://youtube.com/playlist?list=PLWjZVEdMv1BY82izahK45qKh-hp3NFkix
Wanhao D4S: Duet2
https://forum.duet3d.com/post/296755
K40 Laser, Duet2
https://forum.duet3d.com/post/312082
Wanhao D5S
https://www.youtube.com/CNCModellerUK -
@cncmodeller the amount of filament used is known already so it wouldn't be too difficult to track that to mass being added
-
@nuramori said in Coming soon: Accelerometer Support:
@aprz This is how/where I'm mounting mine...
@Nuramori given these don't need to be a permanent fit, are you fitting a plug at the print head to remove it after doing the resonance survey? I will be as I have a moving bed and will also be using the board to characterise my other printers too.
Therefore:
Should I be adding ballast to account for the loss of mass. Probably not unless the print head is very light?
Also should we be terminating the disconnected wire's at the connector to reduce EMF back to the Duet?
Really looking forward to trying this out.
Polar Duet3 Mini + 1HCL
https://youtube.com/playlist?list=PLWjZVEdMv1BY82izahK45qKh-hp3NFkix
Wanhao D4S: Duet2
https://forum.duet3d.com/post/296755
K40 Laser, Duet2
https://forum.duet3d.com/post/312082
Wanhao D5S
https://www.youtube.com/CNCModellerUK -
@cncmodeller said in Coming soon: Accelerometer Support:
Also should we be terminating the disconnected wire's at the connector to reduce EMF back to the Duet?
When you uninstall it, you also comment out the sensor definition. The pins involved will no longer be 'observed' by RRF
-
@o_lampe said in Coming soon: Accelerometer Support:
@cncmodeller said in Coming soon: Accelerometer Support:
Also should we be terminating the disconnected wire's at the connector to reduce EMF back to the Duet?
When you uninstall it, you also comment out the sensor definition. The pins involved will no longer be 'observed' by RRF
Yeah thinking about it I'm just going to have a temporary loom as well so it'll all get removed all the way back to the Duet.
Polar Duet3 Mini + 1HCL
https://youtube.com/playlist?list=PLWjZVEdMv1BY82izahK45qKh-hp3NFkix
Wanhao D4S: Duet2
https://forum.duet3d.com/post/296755
K40 Laser, Duet2
https://forum.duet3d.com/post/312082
Wanhao D5S
https://www.youtube.com/CNCModellerUK -
@cncmodeller
Imagine we'd have to terminate all unused I/O pins on the boards
-
@o_lampe said in Coming soon: Accelerometer Support:
@cncmodeller
Imagine we'd have to terminate all unused I/O pins on the boardsAs I understand it there is a difference between unused pins and unterminated flying wires that are still connected. Unterminated wires would just act as an antenna to draw electromagnetic interference into the Duet.
