Splitting Z-axis steppers
-
@hlwerschner
No, the D-bot is a CoreXY -
@engikeneer
At the moment my config.g is just a standard setup. I've not made any changes. Or at least I've not kept any changes. I rolled them back until I could find something that worked. -
Hi,
If at one point you had both Z steppers connected to the two Z connectors did you restore the jumpers when you disconnected the stepper that is now connected to E1?
Frederick
-
Maybe this is the problem, I did not change any jumpers. I didn't think I needed to. I thought that I could just do the M584 X0 Y1 Z2:4 E3. I've not read anywhere that said I needed to change jumpers.
-
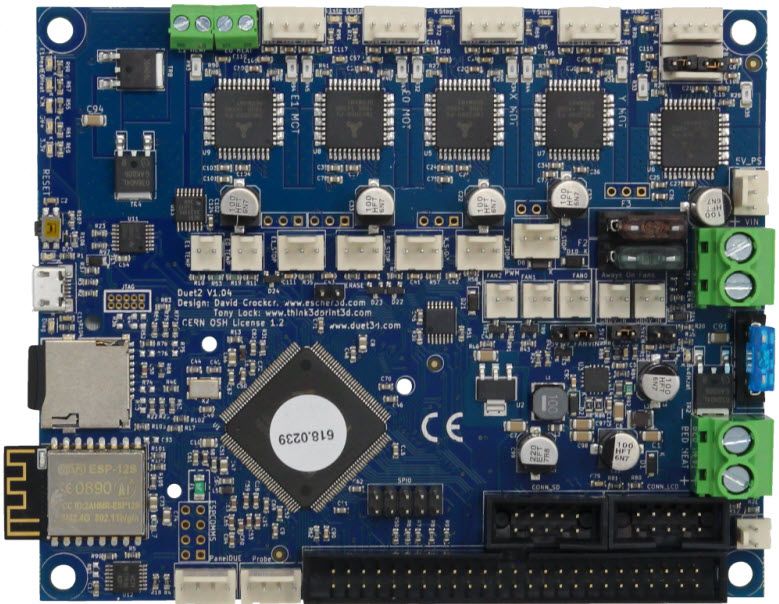
Well IF you had both Z steppers connected to the two Z connectors you had to remove the two little black jumpers on the second Z connector.
IF you removed a cable to a Z stepper from the second Z connector you need to restore the jumpers.
See the upper right corner of this screen shot of the Duet WiFi board.
Frederick
-
@StevePS3 What @fcwilt said...
FYI, the two Z-motor headers on the Duet are wired in series, hence the need for the jumpers to complete the circuit. There's a note about this on the Duet wiring diagrams:
https://duet3d.dozuki.com/Wiki/Duet_Wiring_Diagrams@Phaedrux (/someone with the power) - Might be worth putting a quick reminder about this on the Independent Z motor's page to make things clearer
")
-
Ahhhh. That makes sense. Thanks, let me try that.
-
OK, So I have put the jumpers back and I've updated the config.g
; Drives
M569 P1 S1 ; physical drive 1 goes forwards
M569 P0 S1 ; physical drive 0 goes forwards
M569 P2 S0 ; physical drive 2 goes backwards
M569 P3 S0 ; physical drive 3 goes forwards
M584 X1 Y0 Z2:4 E3 ; set drive mapping
M671 X0:0 Y-20:220 S0.5 ; leadscrews at front (connected to Z) and back (connected to E1) of Y axis
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X100.00 Y100.00 Z400.00 E420.00 ; set steps per mm
M566 X900.00 Y900.00 Z12.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X18000.00 Y18000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2)
M906 X900 Y900 Z1100 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30Other than that I've done nothing so far. I though that it was best to get the leadscrews working before I worries about endstops.
Now the stepper plugged into the E2 is working but the stepper plugged into Z is totally passive.
-
OK, I saw one of the comments and I swapped it to 4:2 and that works.
-
I now have the two endstop positions working but with each enstop probe, both motors are turning. Is that correct? If so then how is this levelling the bed?
-
OK, sorted. I had to change the M574 command to use an S2 probe rather than an S1. All working now, thanks everyone.
-
Glad you got it sorted. I'll add a note to the page about adding the jumpers back to the second Z driver port as it certainly may not be obvious to the uninitiated.
By the way, if you already have a probe you don't really need to use the dual z endstop method at all, but if it's working for you, rock on.
-
This post is deleted!