BLTouch will not deploy
-
Hi,
I am upgrading a CR10S to Duet WiFi, E3D Hemera, AC Mains Heated bed and BLtouch.
I have used 2 previous Duet Wifi's successfully on a custom 500x500x750 delta.
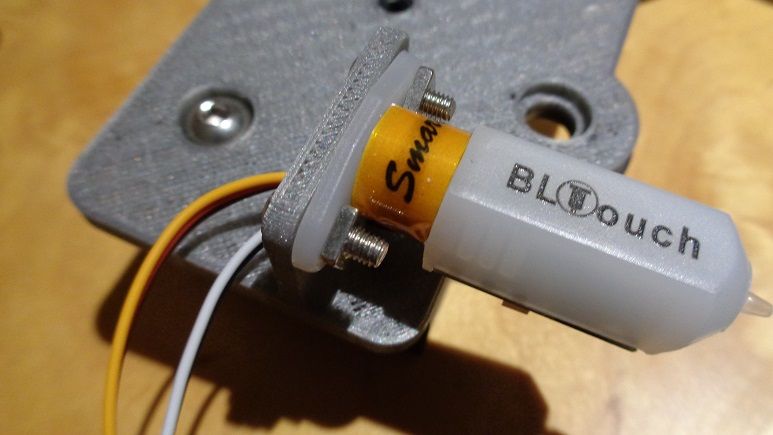
I cannot for the life of me get the BLTouch to Deploy
(I have 2 version 3.1s with standard wiring and 1m extensions)Duet Wifi v 1.04
Firmware version 3.0I have wired per https://betrue3d.dk/bltouch-on-duet-wifi-configuratio-and-usage/
with the servo on heater 7
And I have wired per https://duet3d.dozuki.com/Wiki/Connecting_a_Z_probe#Section_BLTouch
with the probe on heater 3The probe will just not deploy with M401 or the Pin Down Macro
M280 P7 S10 ; Send PWM channel 7 the s10 (angle) commandon power up, the BLtouch deploys the probe twice and there is a constant red led.
NO blue LEDs litPulling the probe out by hand, the red LED goes out.
here is my current config.g
and deploy probe macroI have tried different heaters with no success.
I notice the 3.1 BLtouch no longer has the solder joint to cut to fix the 3.3v logic thing; config.g
; Configuration file for Duet WiFi
; executed by the firmware on start-up; General preferences
G90 ; send absolute coordinates
M83 ; but relative extruder moves
M550 P"CR10S" ; printer name; Network
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet; Drives
M569 P0 S0 ; physical drive 0 goes backwards
M569 P1 S0 ; physical drive 1 goes backwards
M569 P2 S1 ; physical drive 2 goes forwards
M569 P3 S1 ; physical drive 3 goes forwards
M584 X0 Y1 Z2 E3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z3600.00 E420.00 ; set steps per mm
M566 X900.00 Y900.00 Z12.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2)
M906 X800 Y800 Z800 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S60 ; Set idle timeout; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X300 Y300 Z400 S0 ; set axis maxima; Endstops
M574 X1 S1 P"xstop" ; configure active-high endstop for low end on X via pin xstop
M574 Y1 S1 P"ystop" ; configure active-high endstop for low end on Y via pin ystop
M574 Z1 S1 P"zstop" ; configure active-high endstop for low end on Z via pin zstop; Z-Probe
M950 S0 C"exp.heater7" ; create servo pin 0 for BLTouch
M558 P9 C"zprobe.in+zprobe.mod" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X44 Y0 Z2.5 ; set Z probe trigger value, offset and trigger height
M557 X15:215 Y15:195 S20 ; define mesh grid; Heaters
M308 S0 P"bedtemp" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin bedtemp
M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M308 S1 P"e0temp" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin e0temp
M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1
M143 H1 S280 ; set temperature limit for heater 1 to 280C
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit; Fans
M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
M950 F1 C"fan1" Q500 ; create fan 1 on pin fan1 and set its frequency
M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C; Custom settings are not defined
; Miscellaneous
T0 ; select first tooldeployprobe.g
M280 P7 S10 ; deploy BLTouch -
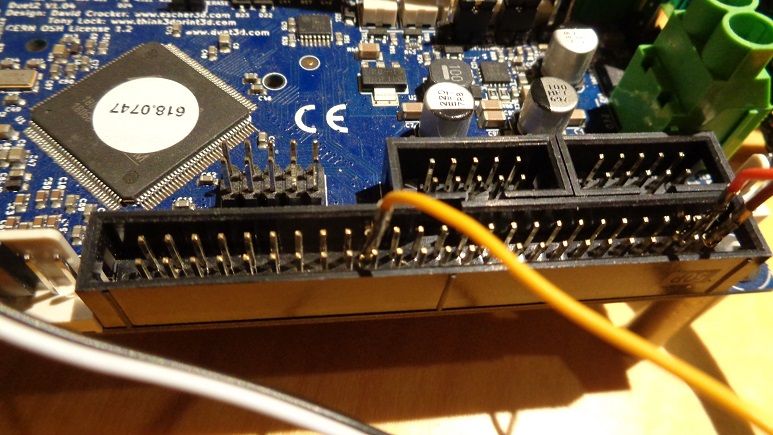
post a picture of your wiring
the rrf3 deploy is
M280 P0 S10 ; deploy BLTouch
-
@PeteIHughes said in BLTouch will not deploy:
M558 P9 C"zprobe.in+zprobe.mod" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
https://duet3d.dozuki.com/Wiki/Connecting_a_Z_probe
The Z probe input pin will be zprobe.in on a Duet 2, or one of io4.in, io5.in or io7.in on a Duet 3. If using zprobe.in, you need to enable the pullup resistor using the ^ character in front of the pin name.
(UTC+1)
-
Hope these help.
As I said, I wired it per https://betrue3d.dk/bltouch-on-duet-wifi-configuratio-and-usage/
on heater 7Also tried the wiring on this site and heater 3

-
Sorry, I really don't understand.
I tried the wiring on the page you linked
https://duet3d.dozuki.com/Wiki/Connecting_a_Z_probe
and this in my config.g
M307 H3 A-1 C-1 D-1
M558 P9 H5 F100 T2000
G31 X0 Y0 Z0 P25so heater 3 I guess.
I did not come across any documentation for the pullup resistor ^ thing.I am just trying to follow posted documentation
Thanks
Pete
btw, the Ender 3 stock is doing a massive job printing the PETG mount right now -
@PeteIHughes said in BLTouch will not deploy:
and this in my config.g
M307 H3 A-1 C-1 D-1
M558 P9 H5 F100 T2000
G31 X0 Y0 Z0 P25This is for firmware 2.0. Are you using Firmware 3.0 or no? Your original config looked almost correct for RRF3.
-
@PeteIHughes
Sorry the link wasn't copied as expected....
https://duet3d.dozuki.com/Wiki/Connecting_a_Z_probe#Section_Software_setup_RepRapFirmware_Num_3M950 S0 C"exp.heater7" ; create servo pin 0 for BLTouch
M558 P9 C"zprobe.in+zprobe.mod" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speedsYou have wired to heater 7 so the code should be
M950 S0 C"exp.heater7"
M558 P9 C"^zprobe.in" H5 F120 T6000
You don't need the mod pin.... -
@PeteIHughes
Also check the endstop setting
That would use an connected endstopM574 Z1 S1 P"zstop" ; configure active-high endstop for low end on Z via pin zstop
Normally with Bltouch the probe is used as endstop
M574 Z1 S2 ; Set endstops controlled by probe -
@DIY-O-Sphere
Thanks for all the help BTWUnfortunately, none of the above suggestions has affected anything.
It is not that the BLtouch isn't probing correctly.
The issue is that the probe doesn't move at all.
The probe servo is not moving the tip out.
It does so twice on power up, but never again.M401 does nothing.
It is almost like it is dead, but as I said, I have 2, and 2 sets of wires.
So I believe that the Duet is not sending a signal to operate the probe pin..I have a multimeter if needed to check duet pin outputs,
and worse case scenario, I have a stock ender 3 I could test it on.Thx again
Pete
-
I am on Duet Web Control ver 2.0:4
Wifi Server ver 1.22
Wifi/ethernet 3.0
2020.01.03b3 -
@Veti said in BLTouch will not deploy:
post a picture of your wiring
the rrf3 deploy is
M280 P0 S10 ; deploy BLTouch
What do you have in your deploy macro? Does it match what veti says here?
-
@PeteIHughes said in BLTouch will not deploy:
It does so twice on power up, but never again.
Then the Bltouch is working
Have you tried "M280 P0 S10" in DWC? -
@DIY-O-Sphere
That worked !!!!!!!
so my guess is that my deploy probe "g" file is bad.
It is all lower case.
could that be it ? -
@PeteIHughes
If they are from RRF2 you have to edit the contentdeployprobe.g
M280 P0 S10retractprobe.g
M280 P0 S90 -
@PeteIHughes said in BLTouch will not deploy:
@DIY-O-Sphere
That worked !!!!!!!
so my guess is that my deploy probe "g" file is bad.
It is all lower case.
could that be it ?No, lowercase is fine. The difference is the M280 P parameter. In RRF2, the P parameter is the logical pin number, which for heater pins is the same as the heater number. In RRF3 is it the number of the servo device that you created using the M950 S command.