Stop Print random. I not understand M122. Desperate
-
Hello,
With no reason stop in random place the print.
All axies are working with the expansion boardCould somebody helpme?
Tested and failed with 2.03 and 2.05Thanks
M122
=== Diagnostics ===
RepRapFirmware for Duet 2 WiFi/Ethernet version 2.05 running on Duet Ethernet 1.02 or later
Board ID: 08DGM-917DA-G4MSD-6J9F8-3SN6P-KSTM9
Used output buffers: 1 of 24 (8 max)
=== RTOS ===
Static ram: 25712
Dynamic ram: 92740 of which 0 recycled
Exception stack ram used: 424
Never used ram: 12196
Tasks: NETWORK(ready,628) HEAT(blocked,1232) MAIN(running,3816) IDLE(ready,160)
Owned mutexes:
=== Platform ===
Last reset 01:04:26 ago, cause: software
Last software reset time unknown, reason: User, spinning module GCodes, available RAM 12264 bytes (slot 2)
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0441f000 BFAR 0xe000ed38 SP 0xffffffff Task 0x4e49414d
Error status: 0
Free file entries: 9
SD card 0 detected, interface speed: 20.0MBytes/sec
SD card longest block write time: 60.6ms, max retries 0
MCU temperature: min 34.9, current 36.7, max 36.9
Supply voltage: min 24.4, current 24.4, max 24.6, under voltage events: 0, over voltage events: 0, power good: yes
Driver 0: standstill, SG min/max not available
Driver 1: standstill, SG min/max not available
Driver 2: standstill, SG min/max not available
Driver 3: standstill, SG min/max not available
Driver 4: standstill, SG min/max not available
Date/time: 1970-01-01 00:00:00
Cache data hit count 4294967295
Slowest loop: 177.90ms; fastest: 0.06ms
I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0
=== Move ===
Hiccups: 13926974, FreeDm: 83, MinFreeDm: 83, MaxWait: 22000ms
Bed compensation in use: mesh, comp offset 0.000
=== DDARing ===
Scheduled moves: 37405, completed moves: 37365, StepErrors: 0, LaErrors: 0, Underruns: 0, 11
=== Heat ===
Bed heaters = 0 -1 -1 -1, chamberHeaters = -1 -1
Heater 0 is on, I-accum = 0.0
=== GCodes ===
Segments left: 1
Stack records: 2 allocated, 0 in use
Movement lock held by null
http is idle in state(s) 0
telnet is idle in state(s) 0
file is doing "G1 X1087.786 Y1704.077 E7.7697" in state(s) 0
serial is idle in state(s) 0
aux is idle in state(s) 0
daemon is idle in state(s) 0
queue is idle in state(s) 0
autopause is idle in state(s) 0
Code queue is empty.
=== Network ===
Slowest loop: 185.73ms; fastest: 0.02ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0)
HTTP sessions: 1 of 8
Interface state 5, link 100Mbps full duplex -
Tested with different gcode files
-
your hiccups counter is realy hight ! look here for more information:high-number-of-hiccups
-
check that you are running x16 with interpolation. thats mostly the problem.
-
But i not configure nothing about x16 or interpolation because i have All axis's in external stepper drivers...
My steps are: X83.5 Y83.5 Z320 and E550 -
@FBG said in Stop Print random. I not understand M122. Desperate:
13926974
Can you post your config and some details about your setup?
-
@FBG said in Stop Print random. I not understand M122. Desperate:
But i not configure nothing about x16 or interpolation because i have All axis's in external stepper drivers...
My steps are: X83.5 Y83.5 Z320 and E550Hiccups occur when the time it takes to generate each step becomes larger than the interval between steps, so something has to give. So you need to either reduce the time it takes to generate each step by reducing the T parameters on your M569 commands for the external drivers (if you can do that without losing steps), or reduce the maximum speed to increase the interval between steps.
-
Today i reduce the steps of Extruder from 550 to 110.
I check the Hiccups a lot times with the same GCode and i see 11 hiccups a times, and another times 0 (mostly). I never see hiccups more that 13 or 14.
The printed work perfectly now.
I understand that hiccups 13 or 14 are stupid and not important yes?Thanks a lot
-
@FBG said in Stop Print random. I not understand M122. Desperate:
I understand that hiccups 13 or 14 are stupid and not important yes?
If that's 13 or 14 hiccups in a short move, it's too much. If it's in a long move at maximum speed with several motors moving at once, then it's OK although zero would be preferable.
-
I see this with all axis in movement, X Y Z and E, +compensate auto level, in not maximum speed but yes high speed.
-
@FBG said in Stop Print random. I not understand M122. Desperate:
I see this with all axis in movement, X Y Z and E, +compensate auto level, in not maximum speed but yes high speed.
High speed is hard to d when using external drivers, because of the long step pulses they need. What M569 T parameters are you using, and what timing does the driver manual specify?
-
I config 10:10:10:10
Manual steppers say: 2.5:5:5:0
-
@FBG said in Stop Print random. I not understand M122. Desperate:
I config 10:10:10:10
Manual steppers say: 2.5:5:5:0
10:10:10:10 is very high. For most drivers, 2.5 is sufficient for the first two values. The last two values may need to be a little larger, such as both 5.
-
So i will test 5 tomorrow, but i remember check 5 in the last and that stepper motor lose some steps.
-
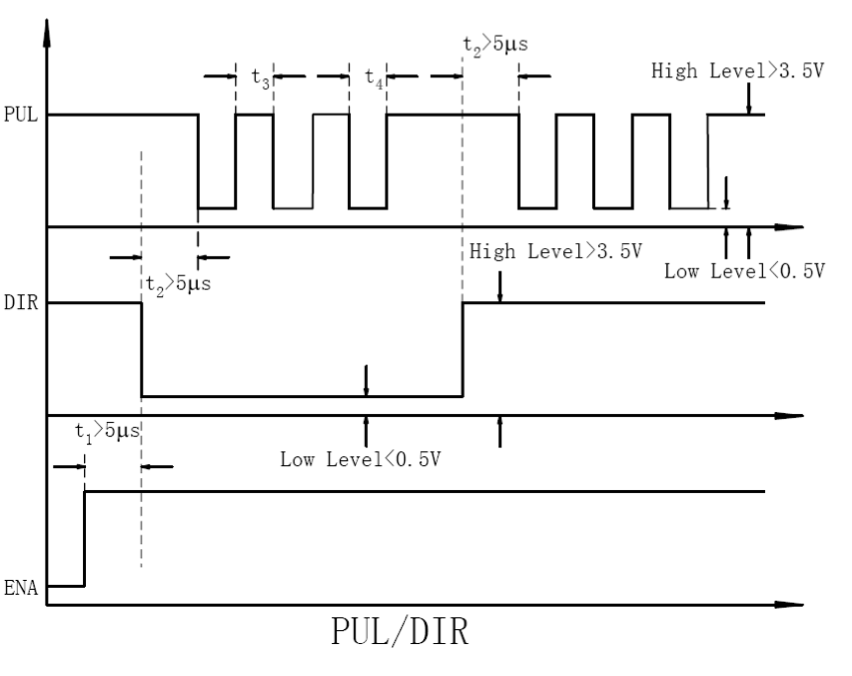
Follow the diagram the correct must be:
M569 T2.5:2.5:5:5yes?
Explain in manual:Remark: a) t1: ENA must be ahead of DIR by at least 5s. Usually, ENA+ and ENA- are NC (not connected). See “Connector P1 Configurations” for more information. b) t2: DIR must be ahead of PUL effective edge by 5s to ensure correct direction; c) t3: Pulse width not less than 2.5s; d) t4: Low level width not less than 2.5s.Thanks!