@jens55 thank you for the information. What kind of printer do you have?
I am putting it on my 300x300x400 corexy
@jens55 thank you for the information. What kind of printer do you have?
I am putting it on my 300x300x400 corexy
I gotta say I upgraded my firmware on my Prusa MK4 to IS… gotta say I love it.
When I learned that I could add it to my custom build, I was elated!
Straight away I ordered the accelerometer from my spot for Duet3D products, Filastruder.
Once I get it and installed, do I just amend the config.g file and that’s it?
I see a native plugin called accelerometer, does this get turned on too?
I see a plugin available called input shaper…so I get this one too? Does this one replace both?
I am so unsure, I am not entirely certain that this is in the correct forum?
Thank you
-lost on the rabbit hole

I like the progress so far, thank you all for the advice.
I have been looking through the forums for what seems like a long time, I’m looking for some kind of process or work flow when calibrating a new printer with a duet.
For instance I know that you’ll need to confirm feed rate before you can calibrate hotend temperature and retract speed. I’d like to tune my new build as efficiently as possible.
I copied the RepRap config that Chris’s basement posted a while ago as a starting point.. I gotta say, he’s got his set FAST. But there’s lots of holes in his guide.
I don’t wanna miss anything, the last time I set up a duet was 2018… and it’s been great since. But the I attempted to add a CR Touch to it and I fried it. It was epic, I pushed the pin and watched a little chip near the bottom turn red like a LED and POP.
@Phaedrux it seems that I have some setting in the prusa slicer messed up. The Cura sliced it and it travels correctly
@Phaedrux said in Z traveling wrong direction during printing:
switching the motor wiring is the same effect as changing the direction of rotation in the config.
You shouldn't change the homing file. Your Z moves need to follow Z- moves bed and nozzle closer together and Z+ moves them farther away. That's just the way it is. The only thing you have control over is where the endstops are located, either high end or low end of travel and how that is set in the config, and finally the direction of rotation of the motors. You can flip that one way or the other so that the Z- and Z+ travel in the expected direction.
This is how mine is going. -Z moves the bed up, toward the nozzle. +Z moves it down.
Gonna try a different slicer
@Phaedrux ;
I just ran this with success
homez.g
; Called to home the Z axis
;
G91 ; Relative positioning
G1 H2 Z10 F10000 ; Lift Z relative to current position
M280 P0 S10 ; Extend the probe pin
G90 ; Use absolute positioning
G1 X143 Y155 F6000 ; Go to the probe point
G30 ; Home the Z axis by probing the bed
G91 ; Use relative positioning
G1 Z5 F100 ; lift Z relative to current position
G90 ; absolute positioning
M280 P0 S90 ; Retract probe pin
;
@Phaedrux
Yes it goes correctly when I manually move it.
However, this is a coreXY machine and I feel like the z motors should be set to run backwards. I have them set to run forwards.
It weird, I am switching out a duet 2 wifi that I accidentally fried switching to a CRTouch. Other than that it’s all the same everything.
I tried to reverse everything, motors and the z commands in all the home.g files, but it homed the wrong way.
Would switch the poles on the motor work?
So after coming along a great deal, I finally melted some plastic. The first layer went fantastic then z went the wrong direction.
I have a duet 3 mini 5+ WiFi. CoreXY configuration.
It homes correctly. (Finally)
I used the prusa slicer to make the print.
Should I put my config.g file(below) and the homeall in the slicer startup gcode?
I switched to advanced in the slicer so I could see all the menu items. I did not see any setting that controls the Z direction. Or even the printer configuration itself…
Configuration file for Duet 3 Mini 5+ (firmware version 3.3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.3.16 on Fri Aug 11 2023 17:43:56 GMT-0400 (Eastern Daylight Time)
; General preferences
M575 P1 S1 B57600 ; enable support for PanelDue
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"CoreXY" ; set printer name
M669 K1 ; select CoreXY mode
; Network
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S1 ; enable Telnet
; Drives
M569 P0.0 S1 ; physical drive 0.0 goes forwards
M569 P0.1 S1 ; physical drive 0.1 goes forwards
M569 P0.2 S1 ; physical drive 0.2 goes forkwards
M569 P0.3 S1 ; physical drive 0.3 goes forwards
M569 P0.4 S1 ; physical drive 0.4 goes forwards
M584 X0.0 Y0.1 Z0.2:0.3 E0.4 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z400.00 E409.00 ; set steps per mm
M566 X600.00 Y600.00 Z12.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X18000.00 Y18000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min)
M201 X3000.00 Y3000.00 Z100.00 E250.00 ; set accelerations (mm/s^2)
M906 X800 Y800 Z800 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X300 Y300 Z380 S0 ; set axis maxima
; Endstops
M574 X1 S1 P"!io5.in" ; configure switch-type (e.g. microswitch) endstop for low end on X via pin io5.in
M574 Y1 S1 P"!io6.in" ; configure switch-type (e.g. microswitch) endstop for low end on Y via pin io6.in
; Z-Probe
M950 S0 C"io3.out" ; create servo pin 0 for BLTouch
M558 P9 C"io3.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X150 Y150 Z2.5 ; set Z probe trigger value, offset and trigger height
M557 X15:215 Y15:195 S20 ; define mesh grid
; Heaters
M308 S0 P"temp0" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin temp0
M950 H0 C"out0" T0 ; create bed heater output on out0 and map it to sensor 0
M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S1 P"temp1" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 1 as thermistor on pin temp1
M950 H1 C"out1" T1 ; create nozzle heater output on out1 and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S285 ; set temperature limit for heater 1 to 285C
; Fans
M950 F0 C"out6" Q500 ; create fan 0 on pin out6 and set its frequency
M106 P0 S1 H1 T45 ; set fan 0 value. Thermostatic control is turned on
M950 F1 C"out5" Q500 ; create fan 1 on pin out5 and set its frequency
M106 P1 S0 H-1 ; set fan 1 value. Thermostatic control is turned off
; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C
; Custom settings are not defined
Thank you so much!
Solved
The CRTouch was fried and my code was bunk.
I’ll dedicate the first Benchy to you guys
@Herve_Smith off to Microcenter then… should I try a different io on the board?
@Herve_Smith 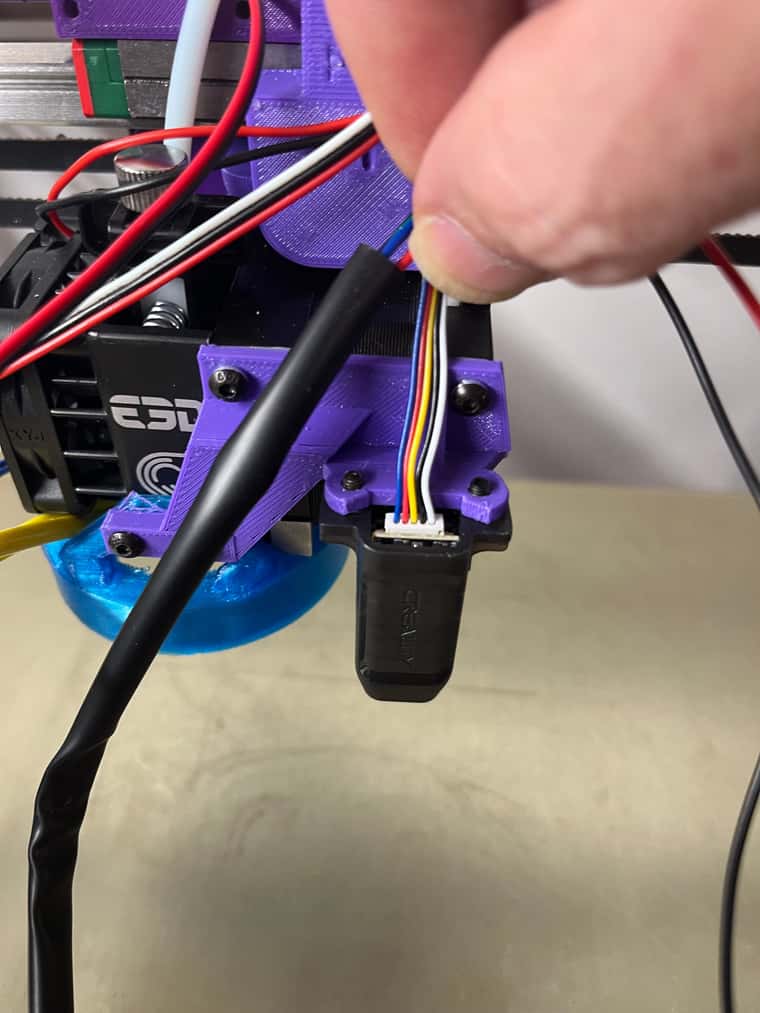
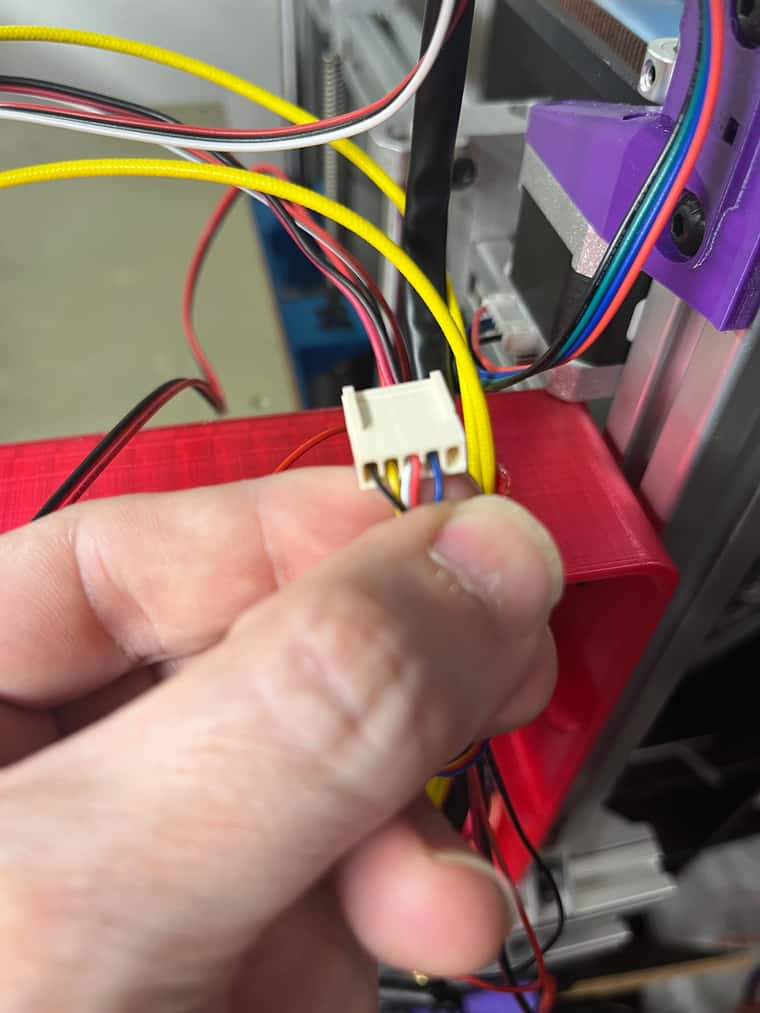
Duet. - CRTouch. - Wire
3.3v - none. - none
IN - OUT - Blue
GND - GND - Red and White
OUT - Control - Yellow
+5V - +5V - black
@Herve_Smith. I checked continuity, my crimps are sufficient.
I tried that homez and pushed the pin while it was traveling. It didn’t stop it.
There is no reading for the probe on the web interface.
I also noticed that after the M401 command, if I press the pin in, I cannot get it to redeploy with another M401. I tried to send M402 then M401. M280 does nothing either. I have to reset the firmware to get it to deploy again.
All that happens when I run the homez.g is the bed moves down 5 mm then I get a G28 Z failed error.
The pin deploys with M401 and retracts with M402: The Z-probe reading never changes
I just changed the line in my Confing.g from
M557 X15:215 Y15:195 S20 to
M557 X15:215 Y15:195 P12
I copied and pasted the homez.g file thet Herve_Smith just supplied above. Now everything looks like it's gonna work. The bed moves down a bit, the pin deploys. The bed moves up, hits the pin on the CRTouch and pushes it up and keeps going until the bed crashed into the nozzle.
This is progress.
Thank you for the help so far.
I cannot get it to homez.g
I have a coreXY running Duet 3 Mini 5+ with a CRTouch.
The M280 deploy and retract work just fine when I send the commands that are in the deploy and retract .g files.
Any help would be greatly appreciated
This is the config.g
; Configuration file for Duet 3 Mini 5+ (firmware version 3.3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.3.16 on Fri Aug 11 2023 17:43:56 GMT-0400 (Eastern Daylight Time)
; General preferences
M575 P1 S1 B57600 ; enable support for PanelDue
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"CoreXY" ; set printer name
M669 K1 ; select CoreXY mode
; Network
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S1 ; enable Telnet
; Drives
M569 P0.0 S1 ; physical drive 0.0 goes forwards
M569 P0.1 S1 ; physical drive 0.1 goes forwards
M569 P0.2 S1 ; physical drive 0.2 goes forkwards
M569 P0.3 S1 ; physical drive 0.3 goes forwards
M569 P0.4 S1 ; physical drive 0.4 goes forwards
M584 X0.0 Y0.1 Z0.2:0.3 E0.4 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z400.00 E409.00 ; set steps per mm
M566 X600.00 Y600.00 Z12.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X18000.00 Y18000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min)
M201 X3000.00 Y3000.00 Z100.00 E250.00 ; set accelerations (mm/s^2)
M906 X800 Y800 Z800 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X300 Y300 Z380 S0 ; set axis maxima
; Endstops
M574 X1 S1 P"!io5.in" ; configure switch-type (e.g. microswitch) endstop for low end on X via pin io5.in
M574 Y1 S1 P"!io6.in" ; configure switch-type (e.g. microswitch) endstop for low end on Y via pin io6.in
; Z-Probe
M950 S0 C"io3.out" ; create servo pin 0 for BLTouch
M558 P9 C"io3.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X150 Y150 Z2.5 ; set Z probe trigger value, offset and trigger height
M557 X15:215 Y15:195 S20 ; define mesh grid
; Heaters
M308 S0 P"temp0" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin temp0
M950 H0 C"out0" T0 ; create bed heater output on out0 and map it to sensor 0
M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S1 P"temp1" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 1 as thermistor on pin temp1
M950 H1 C"out1" T1 ; create nozzle heater output on out1 and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S285 ; set temperature limit for heater 1 to 285C
; Fans
M950 F0 C"out6" Q500 ; create fan 0 on pin out6 and set its frequency
M106 P0 S1 H1 T45 ; set fan 0 value. Thermostatic control is turned on
M950 F1 C"out5" Q500 ; create fan 1 on pin out5 and set its frequency
M106 P1 S0 H-1 ; set fan 1 value. Thermostatic control is turned off
; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C
; Custom settings are not defined
Here is the homez.g
; homez.g
; called to home the Z axis
;
G90 ; absolute positioning
G1 X105 Y100 F900
G30
And here is the M122 result
M122
=== Diagnostics ===
RepRapFirmware for Duet 3 Mini 5+ version 3.3RC2 (2021-05-11 14:55:40) running on Duet 3 Mini5plus WiFi (standalone mode)
Board ID: 37V3T-V196U-D65J0-40KMJ-1P03Z-ZGDWZ
Used output buffers: 3 of 40 (14 max)
=== RTOS ===
Static ram: 102476
Dynamic ram: 106108 of which 336 recycled
Never used RAM 31928, free system stack 132 words
Tasks: NETWORK(ready,15.8%,226) HEAT(delaying,0.0%,338) Move(notifyWait,0.1%,288) CanReceiv(notifyWait,0.0%,943) CanSender(notifyWait,0.0%,357) CanClock(delaying,0.0%,341) TMC(notifyWait,0.7%,115) MAIN(running,82.6%,412) IDLE(ready,0.1%,29) AIN(delaying,0.8%,273), total 100.0%
Owned mutexes: WiFi(NETWORK)
=== Platform ===
Last reset 00:06:43 ago, cause: software
Last software reset at 2023-08-12 22:19, reason: User, GCodes spinning, available RAM 31712, slot 0
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00000000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a
Error status: 0x00
Aux0 errors 0,0,0
Aux1 errors 0,0,0
MCU revision 3, ADC conversions started 403972, completed 403972, timed out 0, errs 0
Step timer max interval 1487
MCU temperature: min 31.8, current 32.1, max 32.9
Supply voltage: min 23.9, current 24.0, max 24.1, under voltage events: 0, over voltage events: 0, power good: yes
Heap OK, handles allocated/used 99/0, heap memory allocated/used/recyclable 2048/8/8, gc cycles 0
Driver 0: position 16000, standstill, SG min/max 0/8, read errors 0, write errors 1, ifcnt 39, reads 21221, writes 12, timeouts 0, DMA errors 0
Driver 1: position 0, standstill, SG min/max 0/8, read errors 0, write errors 1, ifcnt 39, reads 21221, writes 12, timeouts 0, DMA errors 0
Driver 2: position 20000, standstill, SG min/max 0/2, read errors 0, write errors 1, ifcnt 40, reads 21221, writes 12, timeouts 0, DMA errors 0
Driver 3: position 0, standstill, SG min/max 0/2, read errors 0, write errors 1, ifcnt 40, reads 21220, writes 12, timeouts 0, DMA errors 0
Driver 4: position 0, standstill, SG min/max 0/0, read errors 0, write errors 1, ifcnt 29, reads 21224, writes 9, timeouts 0, DMA errors 0
Driver 5: position 0, assumed not present
Driver 6: position 0, assumed not present
Date/time: 2023-08-12 22:26:44
Cache data hit count 772018305
Slowest loop: 23.01ms; fastest: 0.11ms
=== Storage ===
Free file entries: 10
SD card 0 detected, interface speed: 22.5MBytes/sec
SD card longest read time 3.3ms, write time 6.3ms, max retries 0
=== Move ===
DMs created 83, maxWait 30420ms, bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves 14, completed moves 14, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 1], CDDA state -1
=== AuxDDARing ===
Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters = 0 -1, chamberHeaters = -1 -1
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty.
=== CAN ===
Messages queued 3637, send timeouts 3634, received 0, lost 0, longest wait 0ms for reply type 0, peak Tx sync delay 0, free buffers 17 (min 17)
Last cancelled message type 30 dest 127
=== Network ===
Slowest loop: 75.80ms; fastest: 0.00ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions
HTTP sessions: 1 of 8
So after heating up it would rise the bed 2.5mm x4
CoreXY, duet WiFi, 24v, titan extruder, E3D v6, dc42 ir sensor, 110vac heater bed and the rest from china.
After I press the homeall command everything goes fantastic (thank you DC!!). Including the bed homing.
Now when I start a print the extruder moves to position and the bed rises past the Endstop.
I don’t even know where to begin?! (Artist)
Here is my config file.
; Configuration file for Duet WiFi (firmware version 1.21)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool on Sun Dec 16 2018 22:01:10 GMT-0500 (Eastern Standard Time)
; General preferences
G90 ; Send absolute coordinates...
M83 ; ...but relative extruder moves
M555 P1 ; Set firmware compatibility to look like RepRapFirmare
M667 S1 ; Select CoreXY mode
; Network
M550 PMy printer ; Set machine name
M552 S1 ; Enable network
;*** Access point is configured manually via M587
M586 P0 S1 ; Enable HTTP
M586 P1 S0 ; Disable FTP
M586 P2 S0 ; Disable Telnet
; Drives
M569 P0 S1 ; Drive 0 goes forwards
M569 P1 S1 ; Drive 1 goes forwards
M569 P2 S1 ; Drive 2 goes forwards
M569 P3 S0 ; Drive 3 goes backwards
M350 X16 Y16 Z16 E16 I1 ; Configure microstepping with interpolation
M92 X80 Y80 Z1600 E418.599 ; Set steps per mm
M566 X900 Y900 Z12 E120 ; Set maximum instantaneous speed changes (mm/min)
M203 X6000 Y6000 Z180 E1200 ; Set maximum speeds (mm/min)
M201 X500 Y20 Z250 E250 ; Set accelerations (mm/s^2)
M906 X800 Y800 Z800 E800 I30 ; Set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
; Axis Limits
M208 X0 Y0 Z0 S1 ; Set axis minima
M208 X265 Y250 Z380 S0 ; Set axis maxima
; Endstops
M574 X1 Y1 S0 ; Set active low endstops
; Z-Probe
M574 Z1 S2 ; Set endstops controlled by probe
M558 P1 H0 F120 T6000 ; Set Z probe type to unmodulated and the dive height + speeds
G31 P500 X0 Y0 Z2.5 ; Set Z probe trigger value, offset and trigger height
M557 X15:190 Y15:190 S20 ; Define mesh grid
; Heaters
M305 P0 T100000 B4138 C0 R4700 ; Set thermistor + ADC parameters for heater 0
M143 H0 S120 ; Set temperature limit for heater 0 to 120C
M305 P1 T100000 B4724 C7.060000e-8 R4700 ; Set thermistor + ADC parameters for heater 1
M143 H1 S280 ; Set temperature limit for heater 1 to 280C
; Fans
M106 P0 S0.3 I0 F500 H-1 ; Set fan 0 value, PWM signal inversion and frequency. Thermostatic control is turned off
M106 P1 S1 I0 F500 H1 T45 ; Set fan 1 value, PWM signal inversion and frequency. Thermostatic control is turned on
M106 P2 S1 I0 F500 H1 T45 ; Set fan 2 value, PWM signal inversion and frequency. Thermostatic control is turned on
; Tools
M563 P0 D0 H1 ; Define tool 0
G10 P0 X0 Y0 Z0 ; Set tool 0 axis offsets
G10 P0 R0 S0 ; Set initial tool 0 active and standby temperatures to 0C
; Automatic saving after power loss is not enabled
; Custom settings are not configured
; Miscellaneous
T0 ; Select first tool
@stephen6309 hummm I copy and pasted your homeall file... it still fails when it tries to home the bed. to does move differently.