@oliof here is some of the g code, hopefully this is what you need
Latest posts made by frnknstn518
-
RE: Illegal parameter and have no idea where to look or what to do.posted in Duet Web Control
-
Illegal parameter and have no idea where to look or what to do.posted in Duet Web Control
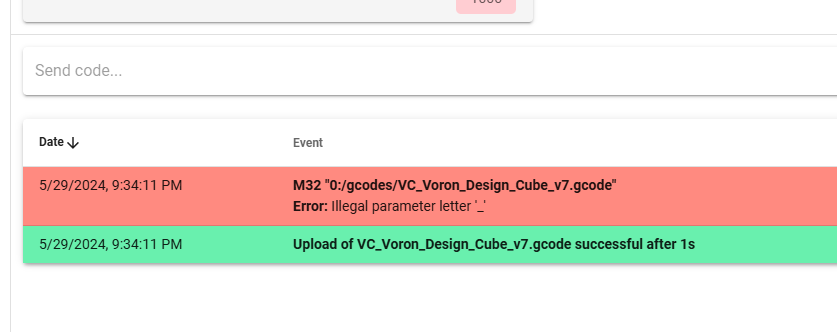
i have everything updated to 3.5.1. this happens when i try to upload to print.
-
RE: klicky probe setup helpposted in Third-party add-ons
@frnknstn518 So this is where im at. I have Euclid probe and i cant seem to get it to trigger. i checked the wiring, and when connected lights are on. When i press the switch it goes off. How do i set this to work with the probe display in DWC. Probe just stays at zero. Here are some of my g files
; Configuration file for Duet 3 MB 6HC (firmware version 3.3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.3.16 on Sat May 13 2023 19:27:15 GMT-0400 (Eastern Daylight Time) ; General preferences M575 P1 S1 B57600 ; enable support for PanelDue G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"Duet 3" ; set printer name M669 K1 ; select CoreXY mode G4 S2 ; Wait for expansion boards to start ; Network ;M552 S1 ;Enable network ;M586 P0 S1 ;Enable HTTP ;M586 P1 S0 ;Disable FTP ;M586 P2 S0 ;Disable Telnet ; ----Z Drive Map---- , ------+------ , | 0.2 | 0.3 | , |-----+-----| , | 0.1 | 0.4 | , ------+------ , FRONT ; Looking at the printer from the top ; Drive directions M569 P1.0 S1 ; physical drive 1.1 goes forwards Y DRIVE M569 P1.1 S1 ; physical drive 1.0 goes forwards X DRIVE M569 P0.1 S1 ; physical drive 0.1 goes forwards FL Z DRIVE M569 P0.2 S0 ; physical drive 0.2 goes forwards RL Z DRIVE M569 P0.3 S1 ; physical drive 0.3 goes forwards RR Z DRIVE M569 P0.4 S0 ; physical drive 0.4 goes forwards RF Z DRIVE M569 P0121.0 S0 ; physical drive 0.0 goes forwards EXTRUDER DRIVE ; Motor mapping and steps per mm M584 X1.1 Y1.0 Z0.1:0.2:0.3:0.4 E121.0 ; set drive mapping M84 S3600 ; motor idle timeout M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X160.00 Y160.00 Z400.00 E690.00 ; set steps per mm ; Drive currents and speeds M566 X900.00 Y900.00 Z60.00 E300.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z180.00 E7200 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z20.00 E3000.00 ; set accelerations (mm/s^2) M906 X1600 Y1600 Z1200 E500 I70 ; set motor currents (mA) and motor idle factor in per cent M84 S120 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X350 Y350 Z350 S0 ; set axis maxima ; endstops M574 X2 S1 P"121.io0.in" ; X min active high endstop switch M574 Y2 S1 P"io5.in" ; Y min active high endstop switch M574 Z1 S1 P"io6.in" ; Z min active low endstop switch ; Z-Probe (Euclid) M558 P8 C"!121.io2.in" X0 Y0 Z1 H3F200 T5000 ; K is probe type, P5 for NC switch, C input pin, H is dive height, F is probing speed, T is travel speed, A is number of probes G31 P500 X 11.0 Y0.5 Z1.65 ; Bed leveling params M671 X-65:-65:365:365 Y0:395:395:0 S20 ; Define Z belts locations (Front_Left, Back_Left, Back_Right, Front_Right) M557 X30:270 Y30:270 P5 ; Define bed mesh grid (inductive probe, positions include the Y offset!) ; Heaters M308 S0 P"temp0" Y"thermistor" T100000 B3950 A"BedTemp" ; configure sensor 0 as thermistor on pin temp0 M950 H0 C"out1" T0 Q10 ; create bed heater output on out0 and map it to sensor 0 M307 H0 R4.843 K1.017:0.000 D1.55 E1.35 S1.00 B0 ; disable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C M308 S1 P"121.temp1" Y"thermistor" T100000 B4725 A"NozzleTemp" ; configure sensor 1 as thermistor on pin temp1 M950 H1 C"121.out0" T1 ; create nozzle heater output on 121.out0 and map it to sensor 1 M307 H1 R5.006 K0.971:0.000 D1.64 E1.35 S1.00 B0 V23.9 ; disable bang-bang mode for heater and set PWM limit M143 H1 S280 ; set temperature limit for heater 1 to 280C ; Fans M950 F0 C"121.out1" Q500 ; create fan 0 on pin 121.out1 and set its frequency M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off M950 F1 C"121.out2" Q500 ; create fan 1 on pin 121.out2 and set its frequency M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on ; Tools M563 P0 D0 H1 ; define tool 0 G10 P0 X0 Y0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C T0 ; Custom settings are not defined; *********************************************************** ; Euclid Probe homez.g Example Macro ; RRF3.X Firmware Example ; saveas system/homez.g ; comments and echo statements throughout are provided for convenience ; *********************************************************** if !move.axes[0].homed || !move.axes[1].homed ; If the printer hasn't been homed, home it M98 P"0:/sys/homexy.g" M561 ; clear any bed transform M290 S0 R0 ; clear baby steps G91 ; relative positioning G1 H2 Z6 F6000 ; lift Z relative to current position to clear any obstructions M400 G90 ; absolute positioning ; echo "Call deployprobe.g macro" M401 P0 ; This runs macro file deployprobe ; echo "Return" G1 X175 Y175 F9000 ; go to center of bed in advance of probe that point M400 ; echo "G30 Command" G30 ; Probe the bed at the current XY position. When the probe is triggered, ; adjust the Z offset of the current tool to make the current position Z=0. G1 Z10 ; raise Z=10 M400 G4 P500 ; echo "Call bed4point.g macro" M98 P"0:/sys/bed4point.g" ; tram bed ; echo "Return" G1 X145 Y162.5 F9000 ; go back to the first probe point and reprobe 0 in case it moved G30 ; echo "Call retractprobe.g macro" M402 P0 ; retract probe ; echo "Return" G1 Z10 F600 ; lift Z relative to current position G90 ; absolute positioning M564 S1 H0 ; reset the bounding limits ; G1 X150 Y0 F9000 ; move carriage to center front; *********************************************************** ; Euclid Probe Fixed Dock Retract Probe Macro M402 ; RRF3.x Firmware Example ; saveas system/retractprobe.g ; comments and echo statements throughout are provided for convenience ; *********************************************************** echo "running retractprobe.g macro" ; uncomment next line to echo the probe deploy state ; echo "Object Model Deployuser token =" ^sensors.probes[0].deployedByUser ; Dock side position is at X0 Y30 ; Docked probe postion is at X0 Y0 ; Dock entry/exit point is at X65 Y0 Z10 **USER MUST ESTABLISH EXIT HEIGHT Z G90 ; absolute positioning M564 S0 ; allow beyond limit axis to print area if sensors.probes[0].value[0]!= 0 echo "Probe Value =" ^sensors.probes[0].value[0] echo "Object Model Deployuser token =" ^sensors.probes[0].deployedByUser abort "retractprobe: Probe not currently picked up!" ; echo "pass first logic loop" ; uncomment next line to echo the probe value and probe deploy state ; echo "Probe Value =" ^sensors.probes[0].value[0] ; echo "Object Model Deployuser token =" ^sensors.probes[0].deployedByUser G1 X150 Y350 Z10 F3000 ; move to ready position G1 X100 Y350 Z10F 3000 ; move to the entry position for the dock G1 X50 Y350 Z10 F300 ; move into the dock position G4 P250 ; pause 250 usecs G1 X50 Y300 Z10 F6000 ; move to the side adjacent to the dock swiping the probe off M400 ; uncomment next line to echo the probe value and probe deploy state ; echo "Probe Value =" ^sensors.probes[0].value[0] ; echo "Object Model Deployuser token =" ^sensors.probes[0].deployedByUser G1 X175.0 Y175.0 Z10 F6000 ; move to the center of the bed M400 M564 S1 ; limit axis to print area ; echo "complete movement commands" if sensors.probes[0].value[0]!= 1000 ; echo "Probe Value =" ^sensors.probes[0].value[0] ; echo "Object Model Deployuser token =" ^sensors.probes[0].deployedByUser abort "retractprobe.g Probe not correctly dropped off in dock!" M564 H1 S1 ; Restrict movement to within axes boundaries (for normal Y movement) echo "Macro retractprobe.g complete"; *********************************************************** ; Euclid Probe Moving Z Dock Deploy Probe Macro M401 ; RRF3.X Firmware Example ; saveas system/deployprobe.g ; comments and echo statements throughout are provided for convenience ; *********************************************************** ; echo "Running deployprobe.g" ; if !move.axes[0].homed || !move.axes[1].homed ; If the printer hasn't been homed, home it ; M98 P"0:/sys/homexy.g" ; uncomment next line to echo the probe deploy state ; echo "Object Model Deployuser token =" ^sensors.probes[0].deployedByUser M564 H0 S0 ; Allow movement BEYOND axes boundaries (for Y to reach probe dock) G91 ; relative positioning echo "Lift Z in advance of deploy" G1 H2 Z15 F3000 ; move Z 15 for clearance above dock. ; ; need to figure out some safety check on this G90 ; absolute positioning ; echo "Probe Value =" ^sensors.probes[0].value[0] if sensors.probes[0].value[0]!=1000 ; if sensor is value other than 1000 do this ; uncomment next line to echo the probe deploy state ; echo "deployuser token = " ^sensors.probes[0].deployedByUser ; echo "Probe State = " ^sensors.probes[0].value[0] abort "deployprobe start value Probe already picked up. Manually return probe to the dock" ; if we're here we know it's because the above is true which I assume is because you have an NC switch as a probe. ; echo "Passed first logic test to deploy probe" ; Dock side position is at X0 Y30 ; Docked probe position is at X0 Y0 ; Dock exit point is at X65 Y0 G1 X50 Y300 F6000 ; move adjacent to probe dock location M400 ; wait for moves to finish G91 ; relative coordinates G1 Z-15 ; recover the z clearance ; echo "Probe Pickup while loop running" ; uncomment next line to echo the probe deploy state ; echo "Object Model Deployuser token (before while loop) = " ^sensors.probes[0].deployedByUser G90 ; absolute coordinates G1 X50 Y350 F3000 ; move over dock G4 S1 ; pause for pickup M400 ; wait for moves to finish while sensors.probes[0].value[0]=1000 ; echo "Probe Pickup while loop running" G91 ; relative coordinates G1 Z-0.25 F600 ; jog bed up 0.25mm change to suit user preference M400 ; wait for moves to finish, allow polling interval to trigger and check probe value G90 ; absolute coordinates ; echo sensors.probes[0].value[0] ; echo iterations if iterations=100 ; if probe has moved 100*step increment without pickup detection, exit loop break G4 P250 ; pause 1/4 seconds echo "Probe Value =" ^sensors.probes[0].value[0] G91 G1 Z-0.5 F600 ; move probe down in the dock to clear the roof. adjust as needed G90 G1 X100 Y350 F1200 ; slide probe out of dock - slowly example exit is to the +X direction G1 Z10 ; move bed to clear probe from build surface M400 G4 P250 ; pause 1 seconds echo "Probe Pickup while loop complete" ; uncomment to echo the probe deploy state ; echo "Object Model Deployuser token (after while loop) = " ^sensors.probes[0].deployedByUser G90 ; absolute positioning G1 X175 Y175 F3000 ; move to center of bed for ready position M400 ; wait for moves to finish if sensors.probes[0].value[0]!=0 ; uncomment to echo the probe deploy state echo "Object Model Deployuser token (in abort if section)= " ^sensors.probes[0].deployedByUser abort "Deployprobe endvalue not 0 Probe not picked up! Deploy cancelled." M564 H1 S1 ; Restrict movement to within axes boundaries (for normal Y movement) echo "Macro deployprobe.g complete" -
RE: klicky probe setup helpposted in Third-party add-ons
@frnknstn518 ; Z-Probe (Euclid)
M558 P8 C"!121.io2.in" X0 Y0 Z1 H3F200 T5000 G31 P500 X 11.0 Y0.5 Z1.65I added the pin back in but i am still wrong somewhere
-
RE: klicky probe setup helpposted in Third-party add-ons
@dc42 just checking in. I checked my wirng to make sure I was g-g v-v and s-s. froom the 1lc to the euclid probe. I am assuming its my config.
; Z-Probe (Euclid) M558 P8 X0 Y0 Z1 H3F200 T5000 G31 P500 X 11.0 Y0.5 Z1.65Is this suppose to be K8 and P5 for the NC switch?
-
RE: klicky probe setup helpposted in Third-party add-ons
@frnknstn518 i thought i was suppose to set this up as type 5 but its on expansion board and i get an error that says it has to be 8 or 9. i thought the switches were 5
; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X350 Y350 Z350 S0 ; set axis maxima ; endstops M574 X2 S1 P"121.io0.in" ; X min active high endstop switch M574 Y2 S1 P"io5.in" ; Y min active high endstop switch M574 Z1 S1 P"io6.in" ; Z min active low endstop switch ; Z-Probe M558 P5 C"!121.io2.in" I1 A5 H1.45 R0.1 F65 T7000 A5 S0.01 B1 -
klicky probe setup helpposted in Third-party add-ons
I want to see if i can get help properly installing my klicky. i have it installed already on voron 350
its set at X 52 Y350Voron 2.4
Duet3 6hc
duet web control 3.4.5
rrf -
RE: trying to see why when i home x and y they only go half way.posted in Tuning and tweaking
@Phaedrux i updated both the boards. then i rebooted. all went to normal thank you
-
RE: trying to see why when i home x and y they only go half way.posted in Tuning and tweaking
@frnknstn518 nevermind i reset and it went back to normal
-
RE: trying to see why when i home x and y they only go half way.posted in Tuning and tweaking
@Phaedrux i ran them but now my nozzle temp went to 2000 and is offline and my graph has lines going straight up