@dc42 i am using only GND and io_0_In for the X limit switch.
Posts made by 3Dream
-
RE: Compatibility 1HCL motor encoder closed loopposted in Duet Hardware and wiring
-
RE: Compatibility 1HCL motor encoder closed loopposted in Duet Hardware and wiring
@dc42 Good evening
Indeed the 7 meter cable does not work, it recognizes Adafruit LIS3DH but creates problems.
So using one of these two systems as an interface could I connect to the EXP1HCL CAN with the Adafruit LIS3DH accelerometer?
Could you give me a link to understand which one to choose and how to connect it?
I'm not using the EXP1HCL board to drive the extruder motor but I drive it directly with the motherboard driver.
However the last EXP1HCL board of the can line is connected to the X axis and is located near the extruder. Approximately 1.5 meter cable. -
RE: Compatibility 1HCL motor encoder closed loopposted in Duet Hardware and wiring
@dc42
ok thanks, when is the next 3.5 release expected?
Currently if I carried a cable from the head/accelerometer to the motherboard I would have a cable about 7 meters long; Do you think it's ok or are there too many problems?
Thanks again and sorry for the many questions -
RE: Compatibility 1HCL motor encoder closed loopposted in Duet Hardware and wiring
@dc42
Hello DC42,
would it be possible to connect an accelerometer like Adafruit LIS3DH to a 1HCL?
On the encoder connector I connected only 4 wires GND, 5V, A input and B input.
Only SPI_SCK would be missing. Can I use CS or CCK?
Thank you -
RE: Compatibility 1HCL motor encoder closed loopposted in Duet Hardware and wiring
@dc42
I tried to bring the value to 6000 but the result doesn't change, maybe it gets worse.Z motors:
Driver 50.0 basic tuning succeeded, measured backlash 0.068 step
Driver 51.0 basic tuning succeeded, measured backlash 0.082 step
Driver 52.0 basic tuning succeeded, measured backlash 0.072 step
Driver 53.0 basic tuning succeeded, measured backlash 0.078 stepY motors:
Error: Driver 54.0 basic tuning failed, measured backlash (0.241 step) is too high
Warning: Driver 54.0 warning: tuning/calibration failed
Warning: Driver 55.0 basic tuning succeeded but measured backlash (0.218 step) is highX motors:
Warning: Driver 56.0 basic tuning succeeded but measured backlash (0.170 step) is high
I am attaching my config referring to the motors.
Tell me if you see any errors please.;Impostazione motori
M569 P50.0 D4 S0; Senso rotazione motori Z0 Post SX
M569.1 P50.0 T2 C1000 S200 R100 I0 D0 ; Configure the 1HCL board at CAN address 50 with a quadrature encoder on the motor shaft that has 5 steps per motor full step.
M569 P51.0 D4 S0; Senso rotazione motori Z1 Ant SX
M569.1 P51.0 T2 C1000 S200 R100 I0 D0 ; Configure the 1HCL board at CAN address 50 with a quadrature encoder on the motor shaft that has 5 steps per motor full step.
M569 P52.0 D4 S0; Senso rotazione motori Z2 Ant DX
M569.1 P52.0 T2 C1000 S200 R100 I0 D0 ; Configure the 1HCL board at CAN address 50 with a quadrature encoder on the motor shaft that has 5 steps per motor full step.
M569 P53.0 D4 S0; Senso rotazione motori Z3 Post DX
M569.1 P53.0 T2 C1000 S200 R100 I0 D0 ; Configure the 1HCL board at CAN address 50 with a quadrature encoder on the motor shaft that has 5 steps per motor full step.
M569 P54.0 D4 S1 ; Senso rotazione motori Y1 SX
M569.1 P54.0 T2 C1000 S200 R100 I0 D0 ; Configure the 1HCL board at CAN address 50 with a quadrature encoder on the motor shaft that has 5 steps per motor full step.
M569 P55.0 D4 S1 ; Senso rotazione motori Y2 DX
M569.1 P55.0 T2 C1000 S200 R100 I0 D0 ; Configure the 1HCL board at CAN address 50 with a quadrature encoder on the motor shaft that has 5 steps per motor full step.
M569 P56.0 D4 S1 ; Senso rotazione motori X
M569.1 P56.0 T2 C1000 S200 R100 I0 D0 ; Configure the 1HCL board at CAN address 50 with a quadrature encoder on the motor shaft that has 5 steps per motor full step.
M569 P0.0 S0
M584 X56.0 Y54.0:55.0 Z50.0:51.0:52.0:53.0 E0.0 P3; Assegnazione motori
M917 X100 Y100 Z100 ; Set the closed loop axes to have a holding current of zero
M350 X128 Y128 I0 ; set steps/mm to 64 to make full use of the encoder resolution
M350 Z32 I0 ; set steps/mm to 32 to make full use of the encoder resolution
M350 E16 I0 ; set steps/mm to 16 to make full use of the encoder resolution
M92 X1600 Y1600 Z1280 E274; Step giro motori
M566 X500 Y500 Z400 E300; Jerk motori
M203 X10000 Y10000 Z1500 E3000; Velocita motori
M201 X1000 Y1000 Z150 E2000; Accelerazione motori
M906 X5000 Y5000 Z4500 E2300 I50; corrente motori
M84 S30
M572 D0 S0.05
;Corse macchina
M208 X0 Y0 Z0 S1; Posizione corsa minima
M208 X1490 Y1450 Z998.2 S0; Posizione corsa massima era 1031.5
;Finecorsa
M574 X1 S1 P"56.io0.in"
M574 Y1 S1 P"54.io0.in+55.io0.in" ; doppio finecorsa microswitch su assi Y SU 1XD 46.io0.in
M574 Z2 S1 P"50.io0.in+51.io0.in+52.io0.in+53.io0.in" ; quadruplo finecorsa proximity su assi Z SU 1XD era !53.io0.in
;Posizione proximity e bed levelling
M558 P5 C"^!io0.in" H8 R1 F120 T10000
G31 P600 X0 Y55 Z1.1; era Z
M557 X5:1490 Y60:1490 S495:476 -
RE: Compatibility 1HCL motor encoder closed loopposted in Duet Hardware and wiring
@dc42
i'm using 5000 which is the maximum i think right?
M906 X5000 Y5000:5000
-
RE: Compatibility 1HCL motor encoder closed loopposted in Duet Hardware and wiring
@dc42
Good morning,
i'm having trouble using my engines on 1HCL boards.
I have used this configuration of motors / screws / guides / structure weight on other machines with external drive and 1XD cards without problems.
The printer is very large.
After tuning example ( M569.6 P50.0 V1 )
On the 4 Z-axis motors (5mm pitch ball screws)
I get example:
Driver 50.0 basic tuning succeeded, measured backlash 0.067 step
But on X Y axes where I use 15mm pitch ball screws
I get example:
Error: Driver 54.0 basic tuning failed, measured backlash (0.237 step) is too high
Warning: Driver 54.0 warning: tuning/calibration failed
I can only reduce the backlash error by disconnecting the screws from the motors.
Can I solve it in some other way?
I installed version 3.5 and tried to use closed loop auto tune without success.
Is there an instruction manual explaining how to use it and where is the data saved?
I can't figure out how to use it
Thank you
David -
RE: Compatibility 1HCL motor encoder closed loopposted in Duet Hardware and wiring
@dc42 the 24V fuse had blown. I replaced it but the out 1 output smoked when the fan was turned on. I do not understand..
-
RE: Compatibility 1HCL motor encoder closed loopposted in Duet Hardware and wiring
@dc42
The 24V that I send to the 1HCL V_Brake input is the same that I use to power the motherboard and all the 24V users (pump, fixed fans) -
RE: Compatibility 1HCL motor encoder closed loopposted in Duet Hardware and wiring
@dc42
Good morning,
the configuration of the machine is going well, and almost everything works.
I have a problem with the OUT0 and OUT 1 outputs of the 1HCL.
The outputs work fine when used with V fused but I can't get them to work when used with V brake. I have 24V input power to the 1HCL but I can't get 24V output.
I'm trying to use it to power a fan.
The CAN 56.0 board refers to the X axis motor of the machine
This is the configuration in config.g;Ventole
M950 F0 C"56.out1" Q250
M106 P0 C"Part"Thank you very much for helping
-
RE: Compatibility 1HCL motor encoder closed loopposted in Duet Hardware and wiring
@dc42 Many thanks
I proceed to purchase -
Compatibility 1HCL motor encoder closed loopposted in Duet Hardware and wiring
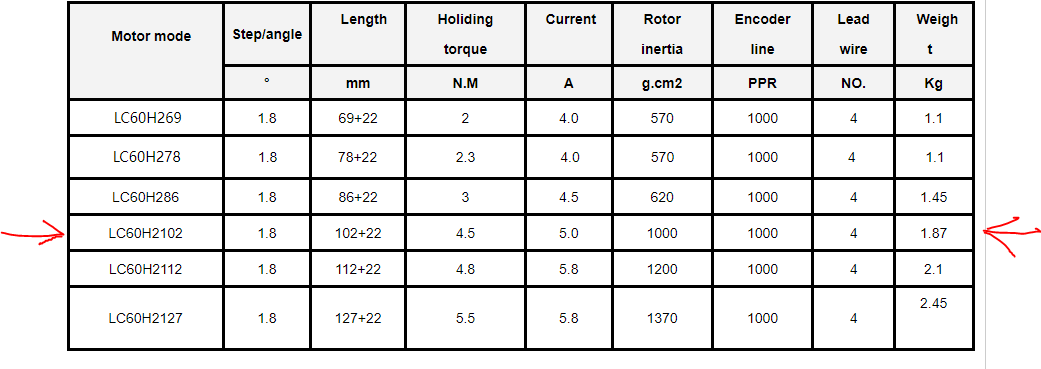
Hello, reading the characteristics it seems to me that the 1HCL expansion is compatible with this motor :
the doubt is on 1000PPR encoder
The goal is to check for any engine position alarms and improve the wiring.
I would like to try using this new expansion on a printer with 7 engines.
I wouldn't want any nasty surprises given the cost of the components.
Could someone please confirm?
Many thanks to all and happy holidays -
RE: Brake motors 1XDposted in Using Duet Controllers
@3dream said in Brake motors 1XD:
Good morning,
even after inserting a 4 second pause the problem persists.
It would seem that the problem is always at the first start in the morning where 1 or 2 Z motors don't want to go.
I switch the machine off and on again several times and the problem disappears. The problem occurs only if the machine remains off for a few hours. Do you have any other ideas please?G4 S4; Pausa per avvio 1XD G21; Unit millimetri G90; Posizioni assolute M83; Estrusore posizione relativa ;Impostazioni rete M550 P3Dream 1300 HYBRID ; Nome macchina M552 P192.168.44.30 M554 P192.168.44.10 M553 P255.255.255.0 M552 S1 M586 P0 S1 M586 P1 S0 M586 P2 S0 M669 K0 ;Impostazione motori M569 P40.0 R0 S1 T5:5:5:5; Senso rotazione motori Z0 Ant DX M569 P41.0 R0 S1 T5:5:5:5; Senso rotazione motori Z1 Ant SX M569 P42.0 R0 S1 T5:5:5:5; Senso rotazione motori Z2 Post SX M569 P43.0 R0 S1 T5:5:5:5; Senso rotazione motori Z3 Post DX M569 P44.0 R0 S0 T5:5:5:5; Senso rotazione motori X M569 P45.0 R0 S1 T3:3:5:0; Senso rotazione motori E Antiorario visto da alto M569 P46.0 R0 S1 T5:5:5:5; Senso rotazione motori Y0 Ant SX M569 P47.0 R0 S1 T5:5:5:5; Senso rotazione motori Y1 Ant DX M569.7 P40.0 C"out1";Freno Z0 M569.7 P41.0 C"out1";Freno Z1 M569.7 P42.0 C"out1";Freno Z2 M569.7 P43.0 C"out1";Freno Z3 M584 X44.0 Y46.0:47.0 Z40.0:41.0:42.0:43.0 E45.0 P3; Assegnazione motori M92 X400 Y400:400 Z1280:1280:1280:1280 E224.6; Step giro motori M566 X500 Y500:500 Z40:40:40:40 E300; Jerk motori M203 X5000 Y5000:5000 Z600:600:600:600 E9000; Velocita motori M201 X500 Y500:500 Z40:40:40:40 E2000; Accelerazione motori ;M572 D0 S0.05 ;Corse macchina M208 X0 Y0 Z0 S1; Posizione corsa minima M208 X1300 Y1290 Z1030.3 S0; Posizione corsa massima era 1031.5 ;Finecorsa M574 X1 S1 P"io2.in" M574 Y1 S1 P"46.io0.in+47.io0.in" ; doppio finecorsa microswitch su assi Y SU 1XD 46.io0.in M574 Z2 S1 P"!40.io0.in+!41.io0.in+!42.io0.in+!43.io0.in" ; quadruplo finecorsa proximity su assi Z SU 1XD ;Posizione proximity e bed levelling M558 P8 C"^!io8.in" H8 R1 F120 T8000 G31 P600 X-28 Y60 Z0.5; era Z-0.8 con pellicola PP M557 X100:1200 Y100:1200 S550:550 ;limiti temperatura estrusione M302 P0 S150 R150 ;Piano riscaldato M308 S0 P"temp_0" Y"thermistor" A"Piano" T100000 B3950 M950 H0 C"out0" T0 M143 H0 S120 M307 H0 B1 S1.00 M140 H0 M570 H0 P1000000 T1000000 ;Estrusore Alto M308 S1 F60 P"spi.cs0" Y"rtd-max31865" A"Alto" ; definizione M950 H1 C"out1" T1 Q100 ; heater 1 uses the high current output pin sensor 1 M143 H1 S400 ; set temperature limit for heater 1 to 300C M570 H1 P1000 T1000 M307 H1 S0.50 ;Estrusore Centro M308 S2 F60 P"spi.cs1" Y"rtd-max31865" A"Centro" ; define E0 temperature sensor M950 H2 C"out2" T2 Q100 ; heater 1 uses the high current output pin sensor 1 M143 H2 S400 ; set temperature limit for heater 1 to 300C M570 H2 P1000 T1000 M307 H2 S0.50 ;Estrusore Ugello M308 S3 F60 P"spi.cs3" Y"rtd-max31865" A"Nozzle" ; define E0 temperature sensor M950 H3 C"out3" T3 Q100 ; heater 1 uses the high current output pin sensor 1 M143 H3 S400 ; set temperature limit for heater 1 to 300C M570 H3 P1000 T1000 M307 H3 S0.50 ;Camera M308 S4 P"temp_1" Y"thermistor" A"Camera" T100000 B3950 Attivazioni varie M950 P8 C"43.out0" ; Creazione GPIO pin 8 su 1XD Can 43 out0 alimentazione proximity finecors Z3 M42 P8 S1 ; abilita uscita 24V proximity Z3 M950 P9 C"42.out0" ; Creazione GPIO pin 9 su 1XD Can 42 out0 alimentazione proximity finecors Z2 M42 P9 S1; abilita uscita 24V proximity Z2 M950 P10 C"41.out0" ; Creazione GPIO pin 10 su 1XD Can 41 out0 alimentazione proximity finecors Z1 M42 P10 S1; abilita uscita 24V proximity Z1 M950 P11 C"40.out0" ; Creazione GPIO pin 11 su 1XD Can 40 out0 alimentazione proximity finecors Z0 M42 P11 S1; abilita uscita 24V proximity Z0 M950 P12 C"45.out0" ; Creazione GPIO pin 12 su 1XD Can 45 out0 alimentazione sensore granulo M42 P12 S1; abilita uscita 24V sensore granulo M950 P13 C"45.out1" ; Creazione GPIO pin 13 su 1XD Can 45 out 1 alimentazione valvola exair granulo tramoggia M42 P13 S1; abilita uscita 24V sensore granulo tramoggia ;M950 J7 C"45.io0.in" ; Creazione input Pin7 su 1XD Can 45 per sensore granulo M591 D0 P2 C"45.io0.in" S1 ;M950 J14 C"^io0.in" ; Creazione input Pin 14 sensori porte ;M581 P14 S1 T6 R1 ; invoca trigger 6 apertura porte ;Ventole M950 F0 C"out7" Q250 M106 P0 S0 H-1 ; Tools M563 P0 D0 H1:2:3 S"Pulsar" ; define tool 0 G10 P0 X0 Y0 Z0 G10 P0 S0 R0 ; set tool 0 axis offsets ;Autopoweroff ;M911 S23 P"G91 M83 G1 Z3 E-2 F1000" M106 S0 M671 X1450:-150:-150:1450 Y-150:-150:1450:1450 S5 M501 -
RE: Brake motors 1XDposted in Using Duet Controllers
Good morning,
even after inserting a 4 second pause the problem persists.
It would seem that the problem is always at the first start in the morning where 1 or 2 Z motors don't want to go.
I switch the machine off and on again several times and the problem disappears. The problem occurs only if the machine remains off for a few hours. Do you have any other ideas please? -
RE: Brake motors 1XDposted in Using Duet Controllers
@dc42
Perhaps I have not explained myself well, I mean that in the config.g there is already the G4 command in the first line. Maybe I need to insert it just before M569.7? or even before M569?
ThanksG4 S2; Pausa per avvio 1XD
G21; Unit millimetri
G90; Posizioni assolute
M83; Estrusore posizione relativa
;Impostazioni rete
M550 P3Dream 1300 HYBRID ; Nome macchina
M552 P192.168.44.30
M554 P192.168.44.10
M553 P255.255.255.0
M552 S1
M586 P0 S1
M586 P1 S0
M586 P2 S0
M669 K0
;Impostazione motori
M569 P40.0 R0 S1 T5:5:5:5; Senso rotazione motori Z0 Ant DX
M569 P41.0 R0 S1 T5:5:5:5; Senso rotazione motori Z1 Ant SX
M569 P42.0 R0 S1 T5:5:5:5; Senso rotazione motori Z2 Post SX
M569 P43.0 R0 S1 T5:5:5:5; Senso rotazione motori Z3 Post DX
M569 P44.0 R0 S0 T5:5:5:5; Senso rotazione motori X
M569 P45.0 R0 S1 T3:3:5:0; Senso rotazione motori E Antiorario visto da alto
M569 P46.0 R0 S1 T5:5:5:5; Senso rotazione motori Y0 Ant SX
M569 P47.0 R0 S1 T5:5:5:5; Senso rotazione motori Y1 Ant DX
M569.7 P40.0 C"out1";Freno Z0
M569.7 P41.0 C"out1";Freno Z1
M569.7 P42.0 C"out1";Freno Z2
M569.7 P43.0 C"out1";Freno Z3 -
RE: Brake motors 1XDposted in Using Duet Controllers
@dc42
I put G4 S2 as the first line in config.g -
RE: Brake motors 1XDposted in Using Duet Controllers
@dc42
Good morning DC42,
even after inserting home Z and home all, M17 (not specific Z) and G4 P800 in the file, sometimes (not always) only 2 or 3 Z motors start. I switch the machine off and on again and everything works correctly. Can you give me some other solution to this problem please? Thank you -
Brake motors 1XDposted in Using Duet Controllers
Good morning everyone,
use of duet 3 + 1XD to drive closed loop stepper motors.
On the Z I mount 4 motors of this type, but with brakes.
Sometimes (not always) it happens to me that by doing the Home of Z the engine starts before the brake releases, sending the engine into alarm.
I would need a slight brake release delay before the motors start.
Can you tell me if it is possible? I did not find anything reading.
Thanks to everyone and have a nice day
David