Clearpath SD servos moving at different speeds
-
Hello, I am writing because we are having issues with controlling our Clearpath SD motors using the Duet Wifi and the servo Expansion Board. We have two servos for the X axis and one for Y, with one of the X servos reversed in the Clearpath software. We have auto-tuned all three as well and set them at 75% torque.
Here are the relevant config settings:
M569 P0 S1 ; Drive 0 goes forwards
M569 P1 S1 ; Drive 1 goes forwards
M569 P2 S1 ; Drive 2 goes forwards
M569 P3 S1 ; Drive 3 goes forwards
M569 P4 S1 ; Drive 4 goes forwards
M569 P5 R0 T1:1:0.5:1
M569 P6 R0 T1:1:0.5:1
M569 P7 R0 T1:1:0.5:1
M584 X5:6 Y7 Z0:1:2:3 E4The two X motors operate at different speeds and go different distances each time, despite receiving the same Gcode command when we test them. They are both set on 800 step resolution in the Clearpath software. We checked voltage and we are only getting output on the Expansion Board ranging from 3.2-3.7V, isn't the Expansion Board supposed to convert it to 5V? Our assumption is that the opto-isolators in the Clearpath are only getting triggered only part of the time, which is why the motors vary in the distance they move and do not return to 0.
I'm currently not near the board so I don't have all of the config memorized but can post more later, any help is very appreciated.
-
I don't know your motors (they are interesting btw), but my thought is, whether you reached some current limit the way you combine the motors. U=I*R, so for given R (are they parallel or serial connected?) and the I is limited to a maximum value (in Duet it would be firmware controlled to 2.4 A or so), so is U. Maybe the I limits the U to 3.7 V.
-
BTW the I currency is variable, so an oscolloscope measuring would be valuable. If you can provide a wiring diagram and information about your motors and the controller, this would help to see where the problem could be. Do you use the Filastruder Expansion board (which uses heater 6,7 of Duet) or another? Is your power sufficient (which could limit P and I).
-
AFAIR another user had a similar problem, and resolved it by increasing the T parameters in the M569 commands.
You can get a higher voltage to the opto isolators by connecting the + inputs of your drivers to +5V instead of to the + output terminals on the expansion board. However, the speed limit is usually determined by how fast the opto isolators turn off, and increasing the drive voltage won't help that.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
I am working on this project with Adam and wanted to chime into the troubleshooting directly here.
My question is does the expansion breakout board boost the signal voltage of each pin to 5v? We were under the impression it did but after looking at this problem we checked it and found that each pin is producing between 3.1-3.6v which may be sporadically triggering the isolators(they have a 5v minimum) resulting in different speeds for each different voltage. dc42's comment about using 5v instead makes me think we were wrong in our thought that this board boosted the signals.
-
This is the breakout board in question https://www.duet3d.com/Expansion_Breakout
-
If you read over the first page I linked it seems to suggest that the 5 motor channels are not necessarily level shifted to 5v but the 2 heater channels are. However if you click the link on the page to the documentation which takes you here https://duet3d.dozuki.com/Wiki/Expansion_breakout_board
It says very clearly "all 5 driver channels are level shifted to 5v", did we get a bad board, is this a typo, am I missing something? -
@joergs5 It's actually driven by a separate power supply, the IPC-3 so we shouldn't be running into any current issues.
From what I've read, it only takes ~8mA to trigger the optoisolators in the Clearpaths and I have it set on 100mA, so that should be sufficient. We are using the servo Expansion Board which we believed to output 5V based on what we read, but it seems like that isn't the case.
I changed M569 to R0 T1:1:1:1 and didn't have any luck, should I try a higher value? And echoing Phil's comments, are the pins on the Expansion Board supposed to be giving off 5V or is 3.2-3.7V normal? We may end up using a converter like this if we need to boost it.
Here is the documentation saying that all servo channels are level-shifted to 5V, but that doesn't seem to be the case with our expansion board.
"The pinout is shown below, all 5 driver channels are level shifted to 5V"
-
In the Clearpath MSP Setup software check that both motors have the same setting for “Input Resolution”
-
@edkirk said in Clearpath SD servos moving at different speeds:
In the Clearpath MSP Setup software check that both motors have the same setting for “Input Resolution”
Sorry, just seen you have both motors set ar the same value.
-
When I'm at a loss, I always try to narrow down the cause. I your case, I would start refresh, remove all special components and start with Duet and the expansion board. Mesasure voltage. Then one motor, measuring, then adding the controller, then two motors, different variations. Sort of.
I see different possibilities: different motor properties (resistor etc.), electric contacts. You should find the reason by isolating the possibilities.
In
https://duet3d.dozuki.com/Wiki/Using_external_stepper_motor_drivers
was a comment not to use a specific 3 pin connector "The 3-pin pads on the Duet near to the stepper drivers are test pads...", maybe you have some wrong wiring similar to that. -
I am curious, what voltage is your power supply? I use a Teknic 75 VDC on my CNC router and a 48 VDC power supply on my corexy. I never checked the signal voltage on my Duet expansion board.
Did you remap the driver signal to the expansion board outputs? I didn’t and discovered the motors worked but didn’t respond to changes I made in Duet firmware.
I run my step resolution higher then 800, I have experimented with different settings and didn’t see any difference, never tried anything that low. I went with a setting that that provided a setting close to the numbers used with a stepper. If the step resolution is to high the motors don’t rotate enough to be noticeable. I thought the motors were bad. -
M569 P0 S1 ; Drive 0 goes forwards
M569 P1 S1 ; Drive 1 goes forwards
M569 P2 S1 ; Drive 2 goes forwards
M569 P3 S1 ; Drive 3 goes forwards
M569 P4 S1 ; Drive 4 goes forwards
M569 P5 R0 T1:1:0.5:1
M569 P5 R0 T1:1:0.5:1
M569 P5 R0 T1:1:0.5:1
M584 X5:6 Y7 Z0:1:2:3 E4Shouldn't the arguments in bold (P5) be changed to P6 and P7 respectively? Looks like the T parameters are only being applied to the first X driver.
Another data point, I use external drivers as well, my spec sheet for my drivers had a minimum pulse width of 250ns, but I had to give it a pulse width of 2000ns to get it to actually work properly and not drop steps, so maybe try increasing the T values past what you think is needed.
I checked my expansion board (same one you use) and my output was also around 3.8-4V. The actual component data sheet is here: http://www.ti.com.cn/cn/lit/ds/symlink/sn75als192.pdf
-
We have swapped cables, motors, driver channels and get the same performance out of each channel regardless of any other physical changes. The performance is also not necessarily repeatable exactly. If we move the axis one direction and then back to zero sometimes it is off by a little or alot.
It seems that the board is not supposed to actually shift the voltage of every channel like it says in the pdf so we will have to accomplish that another way. Hopefully this is the issue, seems to explain it if the 3.5v is only sometimes activating the opto-isolators.
-
The expansion break out board has buffers on to increase the voltage to work with 5V logic. that may not be to exactly 5V as the have losses. I need to test my EBOB to see what voltages I am actually getting.
-
We don't have a single channel that tests over 4v.
-
I am an Engineer with Teknic.
While I do not have any experience with the Duet controller I want to
clarify that the ClearPath logic inputs are rated for 5-24Vdc. If
the Duet controller is not capable of consistently meeting at least 5Vdc
then it is very possible you will see intermittent behavior from the
ClearPath.Please feel free to email us at support@teknic.com if anything comes up we
can help with.Best regards,
Mark D.
-
@philmeiklejohn, @adammikulis I have confirmed that the EBOB are not outputting a 5V differential signal so that is the cause of the issue. It appears that all out other users who need a differential signal have been using drivers that may state they need 5V but actually work with <5V and so this issue has not come up before. I will investigate this in more detail now and get back to you.
-
@philmeiklejohn, @adammikulis I have updated the documentation to remove the reference to level shifting to 5V.
Looking at the clearpath usermanual I see:
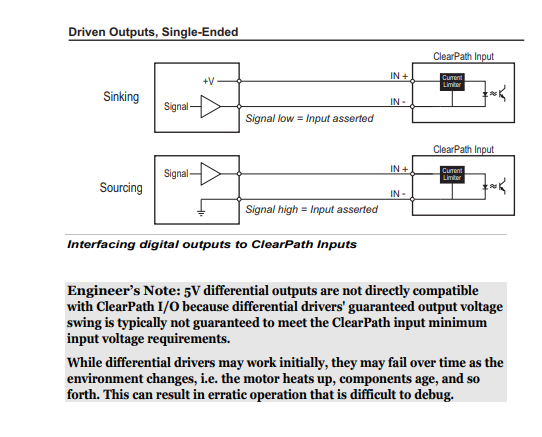
So It looks like the differential outputs of the EBOB are not ideal for driving the clearpath drivers.
As David said:
@dc42 said in Clearpath SD servos moving at different speeds:
AFAIR another user had a similar problem, and resolved it by increasing the T parameters in the M569 commands.
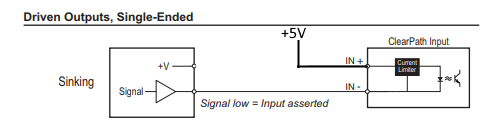
You can get a higher voltage to the opto isolators by connecting the + inputs of your drivers to +5V instead of to the + output terminals on the expansion board.
With that in mind it would be best to connect them in the sinking configuration with 5V provided to IN+ (adapted from drawing in from clearpath manual):
-
@nhof Good catch, it's actually correct in the config file but I was typing it from memory so I messed up those lines here. I will definitely try your suggestion and increase T even more than before, hopefully it won't miss any steps.
And regarding the voltage, if the expansion board isn't able to push 5V then could we simply use that level shifter I posted earlier to bump up each wire? Otherwise we may have to look at an entirely different control board since we need motors this powerful.