Printing ovals instead of circles
-
Hi together,
I have built my own IDEX printer based on a Duet Wifi 2 (RRF 3.4.4).
Everything is running fine except that all my circles printed in xy become ovals.
Parts are sliced in SuperSlicer and orientation doesn't matter.
Skew is already compensated and printed parts are all square.
I checked belttension multiple times.There are only two things I am thinking of that could cause the problem but i am not sure about.
Maybe something with jerk and acceleration values ? But while printing everything looks fine and smooth.
The other thing is, that i am running the x-axis on an external StepperOnline DM542T stepper driver.
link text
I already switched the axis to an onboard Duet Wifi driver with the same result.I am very lost and would be very happy if somebody could help me.
; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"Machine m" ; set printer name M669 K0 ; select Cartesian mode ; Network M552 S1 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0 S0 ; physical drive 0 goes forwards M569 P1 S0 ; physical drive 1 goes forwards M569 P2 S1 ; physical drive 2 goes forwards M569 P3 S1 ; physical drive 3 goes backwards M569 P4 S0 D2 ; physical drive 4 goes forwards M569 P5 S0 R1 T2.5:2.5:5:0 ; drive 5 goes forwards M569 P6 S0 R1 T2.5:2.5:5:0 ; drive 6 goes forwards M569 P7 S0 R1 T2.5:2.5:5:0 ; drive 7 goes forwards M569 P8 S0 R1 T5:5:10:0 ; physical drive 8 goes backwards aa:bb:cc a=Step pulse width/ b= M584 X8 Y1:2 Z5:6:7 U0 E3:4 ; set drive mapping M350 U16 Y16:16 Z16:16:16 E16:16 I1 ; configure microstepping with interpolation M92 X40.00 U80.00 Y53.33 Z640.00 E396.00:396.00 ; set steps per mm (E old 390) M566 X400.00 U400.00 Y400.00 Z300.00 E3000.00 ; set maximum instantaneous speed changes (mm/min) 900 M203 X20000.00 U20000.00 Y20000.00 Z2100.00 E3600.00 ; set maximum speeds (mm/min) M201 X2000.00 U2000.00 Y2000.00 Z400.00 E4000.00 ; set accelerations (mm/s^2) 4000 M204 P4000 T5000 ; Set print and travel accelrations [mm/s^2] M906 U1000 Y1800:1800 E1000:1000 I30 ; set motor currents (mA) and motor idle factor in per cent ;M671 X390:-10:-10 Y200:5:390 S100 F1 ; Leadscrew at rear front, back middle and rear front M671 X390:-10:-10 Y200:5:390 ; Leadscrew at rear front, back middle and rear front M84 S30 ; Axis Limits M208 X-47 U25.5 Y-36 Z0 S1 ; set axis minima M208 X360 U436.7 Y417 Z300 S0 ; set axis maxima M564 H0 ; Allow axis movement before homing ; Endstops M574 X1 S1 P"e1stop" ; set active high endstops for X-axis M574 U2 S1 P"xstop" ; set active high endstops for U-axis M574 Y1 S1 P"ystop+e0stop" ; set active high endstops for Y-axis; 2 enstops used ;M574 Y1 S1 P"e0stop" M574 Z2 S2 ; set endstops controlled by probe ; Z-Probe ;M558 C"!zprobe.mod" P5 R0.4 H1.5 F800:600 T12000 A2 I1 S0.1 ; set Z probe type to effector and the dive height + speeds M558 C"!zprobe.mod" P5 R0.4 H4 F800:600 T12000 A2 I1 S0.1 ; set Z probe type to effector and the dive height + speeds G31 X-0.5 Y-26.352 Z1.45 S20 H0 ; set Z probe trigger value, offset and trigger height 1.58 ;M557 X15:400 Y0:370 S40 ; define mesh grid M557 X5:350 Y0:400 P7:7 ; define mesh grid ; Heaters ; Bed M140 H0 M308 S0 P"bedtemp" Y"thermistor" A"Bed Temperature" T100000 B3950 C7.06e-8 R4700 M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C M307 H0 B1 S1 ;Extruder E0 Hotend (E3D Hemera) M308 S1 P"e0temp" Y"thermistor" A"Extruder 1 temp." T100000 B4725 C7.06e-8 R4700 M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1 M143 H1 S285 ; set temperature limit for heater 1 to 285C M307 H1 B0 A346.2 C189.8 D4.3 S1.0 ; Set heating process parameters, Heater1 (H1),Gain (A), time constant (C), Dead time (D), Max PWM 100% (S1.0) M302 P1 ; Allow cold extrusion M572 D0 S0.025 ; Preassure Advance ;Extruder E1 Hotend (E3D Hemera) M308 S2 P"e1temp" Y"thermistor" A"Extruder 2 temp." T100000 B4725 C7.06e-8 R4700 M950 H2 C"e1heat" T2 ; create nozzle heater output on e0heat and map it to sensor 2 M143 H2 S285 ; set temperature limit for heater 2 to 285C M307 H2 B0 A346.2 C189.8 D4.3 S1.0 ; Set heating process parameters, Heater2 (H2),Gain (A), time constant (C), Dead time (D), Max PWM 100% (S1.0) M302 P1 ; Allow cold extrusion M572 D0 S0.03 ; Preassure Advance ; Fans M950 F0 C"fan0" M950 F1 C"fan1" M106 P0 S0 H-1 ; set fan 0 value, PWM signal inversion and frequency. Thermostatic control is turned off M106 P1 S0 H-1 ; set fan 1 value, PWM signal inversion and frequency. Thermostatic control is turned on ; Tools M563 P0 S"ExtruderE0" D0 H1 F0 X0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C M563 P1 S"ExtruderE1" D1 H2 F1 X3 ; define tool 1 G10 P1 U0.5 Y14.8 Z0 ; set tool 1 axis offsets G10 P1 R0 S0 ; set initial tool 1 active and standby temperatures to 0C T0 ; Accelerometer M955 P0 I54 C"spi.cs4+spi.cs3" ; Accelerometer Configuration M593 P"mzv" F36 ;Input shaping at 33Hz; Damping: 0 ; Custom settings are not defined M305 P2 S"Heizbett oben" T100000 B3950 C7.06e-8 R4700 ; Miscellaneous M556 S100 X-1.058 Skew factor M501 ; load saved parameters from non-volatile memory M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss -
@Manuel207 Most likely mechanical. Check that the X motor pulley is not able to move on the motor shaft.
Ian
Cartesian bed-slinger with Duet 3 Mini 5+ WiFi and 1LC : RRP Fisher Delta v1 with Duet 2 Maestro : TronXY X5S with Duet 3 MB6HC and Roto toolboard
-
@Manuel207 said in Printing ovals instead of circles:
M556 S100 X-1.058
What results do you get without skew correction?
-
@droftarts I checked them. They are all tight on the motorshaft.
-
@Phaedrux I tried to see if the skew compensation has an effect on the dimensions of the ovals. But the result is exactly the same with and without.
-
@Manuel207 Are the oval's axes aligned along x & y, or at 45 degrees to x & y? If the axes are aligned along x & y, it's not the skew compensation, but a scale issue between the axes, or backlash in the belts. If it's at 45 degrees, the skew compensation would fix it.
(update... oops. I forgot this is core-xy, so the syndrome would be different. since the belts already pull at 45 degrees, both belt slip and skew should make an error at 45 degrees. This still leaves the question as to which axis the error is on.)
-
@mendenmh The ovals are 45 degrees to x&y, good point.
It's a rectilinear cartesian motion system. Printhead is on xy (uy). Y-axis runs on two individual steppers, each has its own limit switch.
I could try to play with the skew compensation, but the current measurements work to produce rectangular parts. -
@Manuel207 Are the parts really rectangular, or parallelograms? They would have the right size in x & y if there is skew, but the right angles will be very slightly off right. It is most noticeable on circles, since slight bumps on the corners of rectangular pieces make it really hard to measure the angle between the flat faces. What I did was printed a large, thin circular plate and then measured it carefully, and adjusted the skew until it was round. I now have a really well-calibrated printer.
-
@Manuel207 said in Printing ovals instead of circles:
I don't run an IDEX nor do I use any external drivers but there are a few things that look strange in your config.g
M569 P5 S0 R1 T2.5:2.5:5:0 M569 P6 S0 R1 T2.5:2.5:5:0 M569 P7 S0 R1 T2.5:2.5:5:0 M569 P8 S0 R1 T5:5:10:0You have different values for drive 8. Are those values correct?
Also, from the WIKI we have quote .......
" RepRapFirmware takes the highest T parameters seen in any M569 command, and applies those values to all drivers for which any nonzero T parameter was specified."
That's a bit open to interpretation but as I read it, the T value for drive 8 will be applied to drives 5,6 and 7 but as they are different motors, are those values appropriate?
Then we have.............
M350 U16 Y16:16 Z16:16:16 E16:16 I1Firstly you haven't set micro-stepping for the X axis. I believe the default is 16X so it might not matter but it's always best to explicitly declare these things. Secondly, micro stepping is applied per axis and not per motor. You must use identical motors and remove the colon separators for Y and Z (but not for the extruders as these are treated as separate axes). I believe the firmware will use the first value and ignore the others, but again it's best to do it correctly.
Then we have.........
M92 X40.00 U80.00 Y53.33 Z640.00 E396.00:396.00This is very strange. I assume the U axis is the second "X" axis so why are the steps per mm so different given that micro stepping is the same? Are you using different size pulleys?
More importantly, the value for the Y axis is a very strange number (53.33) - almost as if you have an imperial rather than metric size pulley. How did you arrive at this number? If you command a (say) 300 mm move on each of the X,U and Y axes, do you get exactly 300mm of movement? If the steps per mm for the Y axis are not correct, then that would certainly give you ovals instead of circles.
Next we have ....
M566 X400.00 U400.00 Y400.00 Z300.00 E3000.00 M203 X20000.00 U20000.00 Y20000.00 Z2100.00 E3600.00 M201 X2000.00 U2000.00 Y2000.00 Z400.00 E4000.00This is not relevant to your issue but you need to specify values for the second extruder using a colon separator in all of the above commands.
Also...
M204 P4000 T5000Again, not relevant to your issue but the firmware will apply the limits set in M201 so higher values in M204 will have no effect.
Lastly....
M906 U1000 Y1800:1800 E1000:1000 I30Firstly you haven't specified a motor current to the X axis (nor the Z axis). This will result in a very low current being applied so you might well get missed steps which could lead to ovals instead of circles. Secondly, you have used the colon separator for the Y axis but the firmware does no support different current settings for multiple motors on the same axis. So add the motor currents for X and Z but remove the second value for the Y axis.
-
@deckingman I have different values because I have different external motor drivers. Drive 5-7 driving the z-axis and drive 8 the x-axis. Since i ran out of onboard drivers on my duet wifi I used the drivers i had laying around. The project grew over time. When I started the build I was on a budged. Nowadays I would switch to a Duet 3 board.
I need the higher values for the DM542T to work properly. Lower values caused wierd layershifting to one side.Good point with the microstepping per axis, I corrected this thank you!
The x-axis is not listed because I set microstepping via dip-switches on the external motor drives. (With this in mind I can delete the z-axis microsteps too)The different steps/mm values for x and u also refer to using different motor drivers. U is driven by the onboard duet wifi driver and x by the external DM542T.
I am running a HTD 3M 10mm belt on the y axis with a 20 teeth pulley.
The calculator gave me this value: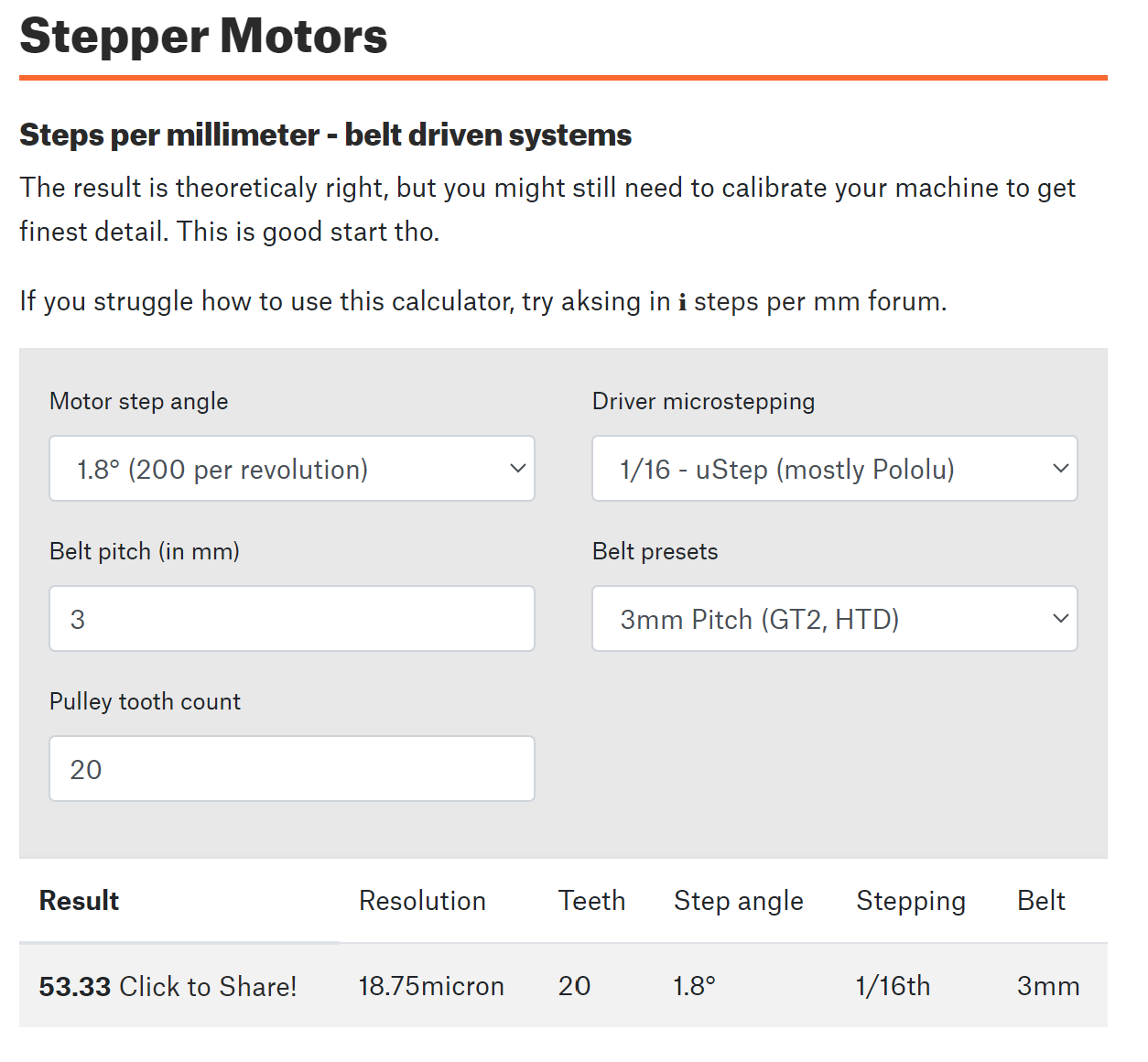
The measured dimensions of the parts are correct. Is there better way to measure the driven distance directly on the axis?
Thanks for the tip with the colon seperator I updated my config file!
The currents for x and z in M906 are also not specified beacuse i am driving them of the external driver.
-
@Manuel207 Hmmm. So do you get ovals with both X and U? It might be worth checking. If U uses an onboard driver and X is using an external driver, then if there are differences in prints it would indicate an issue with the external driver settings. If the prints are the same, then we need to look elsewhere.
The U axis steps per mm calculator looks correct and I get the same number. i.e. 3mm pitch x 20 teeth = 60mm per revolution. 200 full steps per rev / 60mm = 3.3333 full steps per mm x 16 micro steps = 53.333 steps per mm. But it might still be worth checking. Looking at you axis limits, you should be able to do a 400mm long move (25.5min, 436.7 max). So you could get a fair approximation of actual distance using a steel tape measure. You ought to be able to measure within a mm which is a maximum error of 0.25% over 400mm. If the ovals are caused by incorrect steps per mm and you command a 400mm move then you should see that with a tape measure. i.e if it's within a mm then it's probably right, if it's 5, 10 or more mm out, then that's the problem.
-
@deckingman I tested a 400mm move and it is nearly perfect (maybe 0,2-0,3mm if even measurable?).
I also printed the same part with the second tool and voila perfect circles. So you are on the right path. It has probably something to do with the external driver. I am going to test different microstep settings and currents on the external driver? Do you have other suggestions what it could cause?
-
@Manuel207 said in Printing ovals instead of circles:
@deckingman I tested a 400mm move and it is nearly perfect (maybe 0,2-0,3mm if even measurable?).
I also printed the same part with the second tool and voila perfect circles. So you are on the right path. It has probably something to do with the external driver. I am going to test different microstep settings and currents on the external driver? Do you have other suggestions what it could cause?
Well at least that's narrowed it down to the external driver. Sorry I have zero experience of external drivers so can't offer any other advice. Maybe someone more knowledgable than me about these things will step in.