Need help setting up a Mellow Fly-RRF36 v1.0 board
-
I am having trouble setting up a Fly-RRF36 v1.0 with my Duet 6HC running RRF 3.5-rc.1 in SBC mode.
Like discribed in the instructions I downloaded the file called Duet3Firmware_FLY36RRF.uf2 from here
then dragged and dropped the .uf2 file onto the rpi drive. After Disconnecting the board from the PC and connecting it to the printer the "working LED" keeps flasching rapidly and the can connection is not working.
I have also double checked my wiring and the CAN-termination jumper on the board is present. -
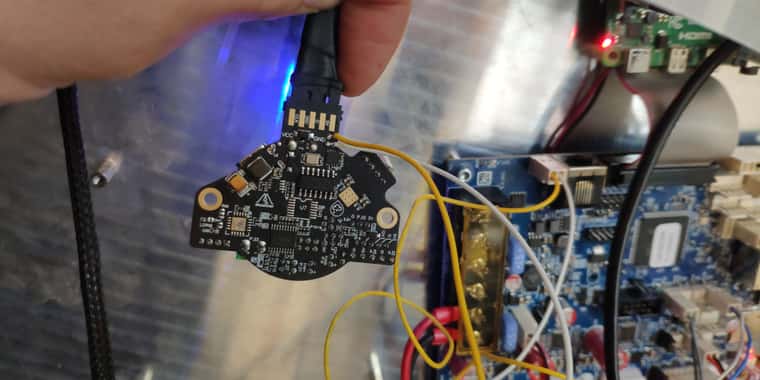
@MaxGyver If the led is flashing rapidly then there is no can connection between the boards. Do you have any other CAN boards connected to the 6HC? Try swapping over the CAN-H and CAN-L wires and see if that helps. If not post some pictures so we can see how you have the two boards connected.
-
I have disconnected all other can CAN boards. In order to make sure there is nothing wrong with the toolboard cable I made, i have soldered wires directly to the CAN-L and CAN-H pins on the toolboard. The main connector only supplies 24V Power.
-
@MaxGyver
You may be experiencing the same issue I had in relation to the 6HC.
At least for me, on the 6HC I was unable to use the CAN0 connector (which looks like the one you are connected to) and instead HAD to use the RJ11 can connector instead. I did so by just buying a RJ11 and cutting one side off to expose the wires and use them instead.The real bamboo printer manufacturer
-
@MaxGyver That looks like you are connecting to CANFD0 on the Duet board, you need to connect to CANFD1 (which is the connector next to the one you are using). CANFD0 is not normally used for the connection of Duet expansion boards (and normally runs a different CAN protocol for talking to ODrives I think, not even sure if it is enabled). Did you try the standard CANFD1 connector before trying this?
Edit: Looks like @Notepad beat me to it!
-
Yes, the standard CANFD1 connector is working!
Thank you both for your support.@gloomyandy said in Need help setting up a Mellow Fly-RRF36 v1.0 board:
That looks like you are connecting to CANFD0 on the Duet board, you need to connect to CANFD1 (which is the connector next to the one you are using). CANFD0 is not normally used for the connection of Duet expansion boards (and normally runs a different CAN protocol for talking to ODrives I think, not even sure if it is enabled)
May I suggest adding this detail to the insturctions? Since the toolboard comes without a RJ11 connector, I assumed that it is supposed to be connected to CANFD0 on the mainboard...
-
@MaxGyver https://docs.duet3d.com/en/Duet3D_hardware/Duet_3_family/Duet_3_Mainboard_6HC_Hardware_Overview#can-fd-bus-expansion states that you should use the RJ11 connector, but does not discuss CAN0 at all, so I guess you are right, this could be clarified.
-
One for @droftarts
-
@MaxGyver CAN0 was integrated into the RJ11 socket on earlier 1HC board versions, and was split out to a separate header on the v1.02 board revision, but this change is not actually mentioned in the Revision History, and I'm not sure why. I've asked @T3P3Tony.
But the others are correct; currently only CAN1 is used in the current releases. I understand CAN0 can be activated, and the Hangprinter fork uses it to initialise their motor drivers. It's there on all boards for the time it is needed, I guess that's forwards-compatibility?!
I'll update the documentation when I hear back from Tony.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts said in Need help setting up a Mellow Fly-RRF36 v1.0 board:
I understand CAN0 can be activated
If you can inquire how to activate the CAN0 that would be helpful. My quick searching came up empty, as it is easier to wire up the CAN0 to Mellow products than chop an RJ11 connector in half and wire it up that way
-
@Notepad It's a firmware thing, not my department! One for @dc42. It's probably relatively easy to switch to CAN0 from CAN1, but I don't know about running both at the same time.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts You would need to edit and rebuild the firmware to use the other can-fd channel, but I very much doubt if running things in that configuration has been tested.
-
@gloomyandy said in Need help setting up a Mellow Fly-RRF36 v1.0 board:
You would need to edit and rebuild the firmware to use the other can-fd channel
That's what I meant by 'easy' for @Notepad! He's quite au fait with the firmware.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts Well the code is here: https://github.com/Duet3D/RepRapFirmware/blob/3.5-dev/src/CAN/CanInterface.cpp good luck!
-
@gloomyandy
@droftarts
@Notepad
@dc42From my perspective, there is no need to switch to CAN0 from CAN1. Since it was not specified in the team gloomy documentaion that only CAN1 will work with the toolboard, I assumed both would do it.
In my case it would have simplified the wiring of the toolboard a bit because my 24V PSU is mounted close to the Duet 6HC. I have four 1HCL expansion boards mounted inside the build chamber. But they are all running on 48V. So I split the toolboard cable in CAN and power. CAN goes to to ne of the toolboards and power goes all the way down to the underside of my printer to the 24V PSU. Not as tidy, but works.
")