BLTouch Probe Won't Deploy
-
@fcwilt
This is correct, but I cant seem to replicate the scenario in which it worked. -
@charlie said in BLTouch Probe Won't Deploy:
@fcwilt
This is correct, but I cant seem to replicate the scenario in which it worked.Well we are overlooking something simple.
Did you post what the DWC Z Probe readout value is?
Frederick
-
@fcwilt
Z Probe readout value is 0, and remains 0 for the entire homing attempt. -
Im unsure as to whether this means anything, but the BLTouch light remains a solid red when the machine is idle, as well as before and during the homing process. Of course the light shuts off when I power off the machine to prevent crashing, but the probe also deploys when power is turned off while the Z probe is occuring.
-
@charlie said in BLTouch Probe Won't Deploy:
Im unsure as to whether this means anything, but the BLTouch light remains a solid red when the machine is idle, as well as before and during the homing process. Of course the light shuts off when I power off the machine to prevent crashing, but the probe also deploys when power is turned off while the Z probe is occuring.
Well it's getting late and I've got to get some sleep.
Sorry we couldn't get it sorted in this session.
I will run some tests with my BLTouch and see I can determine what conditions could be causing your problems.
Talk to you later.
Good night.
Frederick
-
No worries, same here. Thank you so much for the time that you have put into this issue. I greatly appreciate it!
Im hoping that this isnt an interference issue that will require shielding.
Thanks again! Good night.
-
-
@charlie said in BLTouch Probe Won't Deploy:
M558 K0
Can you try without the K0? If you only have a single probe, best to leave it off.
Can you please share your full config.g?
What exactly do you have in your deployprobe.g and retractprobe.g files in the sys folder?
Does M401 and M402 work to deploy or retract the probe?
Does the probe deploy when you send G30?
Does the BLTouch pin deploy and retract when power is first applied?
How exactly is the BLtouch wired?
And The results of M122 and M98 P"config.g"?
Also send M558, G31, by themselves are see what they return. -
@phaedrux said in BLTouch Probe Won't Deploy:
deployprobe.g and retractprobe.g files
I want to add that the filenames are deployprobe0.g and retractprobe0.g (so with 0 added), but I thought it is ok because of the K0.
The code is in GCodes3.cpp DeployZProbe() and RetractZProbe(), and looks ok.
The filenames must be all lowercase.
-
@charlie maybe your BLtouch is too near to the bed, please check
(from https://forum.duet3d.com/topic/17329/bl-touch/4)and then a higher height like H5 in the M558.
-
@phaedrux said in BLTouch Probe Won't Deploy:
Can you try without the K0? If you only have a single probe, best to leave it off.
Unfortunately this doesnt change the outcome. I appreciate the attempt though.
-
@phaedrux said in BLTouch Probe Won't Deploy:
Can you please share your full config.g?
config.g (part 1 of 2, due to character limit):
; Voron ; 0:/sys/config.g ; Configuration file for Duet 3 (firmware version 3.3). ; Executed by the firmware on start-up. ; 2021/06/30/12:59 ; General Preferences G90 ; Set all axes (not extruders) to absolute positioning. M83 ; Set all extruders (not axes) to relative positioning. M550 P"Voron" ; Set machine name. ; P (Machine name): Voron. M669 K1 ; Set kinematics type and parameters. ; K (Kinematics type): 1 (CoreXY). ; Drive Map ; XY Drives ; | A | B | ; Z Drives ; | 3 | 0 | ; ------- ; | 2 | 1 | ; Front ; Drives M569 P0.0 S1 ; Set motor driver direction. ; P (Motor drive number): 0.0 (Mainboard driver 0 board label, XY, A, top left motor). ; S (Direction of movement): 1 (Forward). M569 P0.1 S1 ; Set motor driver direction. ; P (Motor drive number): 0.1 (Mainboard driver 1 board label, XY, B, top right motor). ; S (Direction of movement): 1 (Forward). M569 P0.2 S0 ; Set motor driver direction. ; P (Motor drive number): 0.2 (Mainboard driver 2 board label, Z0, far right motor). ; S (Direction of movement): 0 (Backwards). M569 P0.3 S1 ; Set motor driver direction. ; P (Motor drive number): 0.3 (Mainboard driver 3 board label, Z1, close right motor). ; S (Direction of movement): 1 (Forward). M569 P0.4 S0 ; Set motor driver direction. ; P (Motor drive number): 0.4 (Mainboard driver 4 board label, Z2, close left motor). ; S (Direction of movement): 0 (Backwards). M569 P0.5 S1 ; Set motor driver direction. ; P (Motor drive number): 0.5 (Mainboard driver 5 board label, Z3, far left motor). ; S (Direction of movement): 1 (Forward). M569 P1.0 S1 ; Set motor driver direction. ; P (Motor drive number): 1.0 (Expansion driver 0 board label, E1, Extruder 1). ; S (Direction of movement): 1 (Forward). M584 X0.0 Y0.1 Z0.2:0.3:0.4:0.5 R0 S0 E1.0 ; Set drive mapping. ; X (Driver number for X motor): 0.0 (Mainboard driver, 0 board label). ; Y (Driver number for Y motor): 0.1 (Mainboard driver, 1 board label). ; Z (Driver number for Z motors): 0.2:0.3:0.4:0.5 (Mainboard driver, 2, 3, 4, & 5 motor labels). ; R (Axes created in command are...): 0 (linear). ; S (Axes created in command are treated in feedrate calculations as...): 0 (linear). ; E (Driver number for E motor): 1.0 (Expansion driver, 0 motor label). M671 X410:410:-60:-60 Y422:-8:-8:422 S20 F1.0 ; Set positions of z belts (60mm X, 72mm Y offsets in back. 60mm X, 8mm Y offsets in front.) 0 (410,422), 1 (410, -8), 2(-60, -8), 3(-60, 422). ; X (X coordinates of Z screws): ... ; Y (Y coordinates of Z screws): ... ; S (Maximum correction to apply to each Z screw [mm]): 20. ; F (Fudge factor): 1.0. M350 X16 Y16 Z16 E16 I1 ; Set microstepping and interpolation. ; X (Stepping mode for the X axis): 16 (1/16 step). ; Y (Stepping mode for the Y axis): 16 (1/16 step). ; Z (Stepping mode for the Z axis): 16 (1/16 step). ; E (Stepping mode for the extruder): 16 (1/16 step). ; I (Microstepping interpolation mode): 1 (Enable). M92 X80.00 Y80.00 Z400.00 E413.00 ; Set axis steps per unit. ; X (Steps/mm for X axis): 80.00. ; Y (Steps/mm for Y axis): 80.00. ; Z (Steps/mm for Z axis): 400.00. ; E (Steps/mm for extruder): 413.00. M566 X300.00 Y300.00 Z12.00 E120.00 ; Set maximum instantaneous speed change (jerk). ; X (Maximum instantaneous speed change for X axis [mm/min]): 300.00. ; Y (Maximum instantaneous speed change for Y axis [mm/min]): 300.00. ; Z (Maximum instantaneous speed change for Z axis [mm/min]): 12.00. ; E (Maximum instantaneous speed change for extruder [mm/min]): 120.00. M203 S1 X300.00 Y300.00 Z15.00 E20.00 ; Set maximum feedrate (speed). ; S (Units): 1 (mm/sec [default is mm/min]). ; X (Maximum feedrate for X axis [mm/sec]): 300.00. ; Y (Maximum feedrate for Y axis [mm/sec]): 300.00. ; Z (Maximum feedrate for Z axis [mm/sec]): 15.00. ; E (Maximum feedrate for extruder [mm/sec]): 20.00. M201 X3000.00 Y3000.00 Z350.00 E250.00 ; Set maximum print move accelerations. ; X (Maximum acceleration for X axis [mm/sec^2]): 3,000.00. ; Y (Maximum acceleration for Y axis [mm/sec^2]): 3,000.00. ; Z (Maximum acceleration for Z axis [mm/sec^2]): 350.00. ; E (Maximum acceleration for extruder [mm/sec^2]): 250.00. M906 X1500 Y1500 Z1400 E700 I30 ; Set maximum motor currents. ; X (X drive maximum motor current [mA]): 1,500 (75% of max rated motor current of 2,000 mA). ; Y (Y drive maximum motor current [mA]): 1,500 (75% of max rated motor current of 2,000 mA). ; Z (Z drive maximum motor current [mA]): 1,400 (70% of max rated motor current of 2,000 mA). ; E (Extruder maximum motor current [mA]): 700 (70% of max rated motor current of 1,000 mA). ; I (Motor current idle factor): 30. M84 S30 ; Stop idle hold. ; S (Idle time out[seconds]): 30. ; Axis Limits M208 S1 X0 Y0 Z0 ; Set axis maximum travel. ; S (Set axis): 1 (Minimum). ; X (X axis limit): 0. ; Y (Y axis limit): 0. ; Z (Z axis limit): 0. M208 S0 X350 Y350 Z310 ; Set axis maximum travel. ; S (Set axis): 0 (Maximum). ; X (X axis limit): 350. ; Y (Y axis limit): 350. ; Z (Z axis limit): 310. ; Endstops M574 X2 P"0.io0.in" S1 ; Set endstop configuration. ; X (Position of X endstop): 2 (High end). ; P (Pin name): 0. (Mainboard) io0.in. ; S (Endstop type): 1 (Switch type). M574 Y2 P"0.io1.in" S1 ; Set endstop configuration. ; Y (Position of Y endstop): 2 (High end). ; P (Pin name): 0. (Mainboard) io1.in. ; S (Endstop type): 1 (Switch type). M574 Z0 ; Set endstop configuration. ; Z (Position of Z endstop): 0 (None). -
@phaedrux said in BLTouch Probe Won't Deploy:
Can you please share your full config.g?
config.g (part 2 of 2, due to character limit):
; Z Probe M558 P9 F120 H3 R0 T6000 A1 B0 C"0.io4.in" ; Set Z probe type. ; K (Z probe number): 0 (1). ; P (Z Probe type): 9 (BLTouch probe). ; F (Feed rate. Probing speed [mm/min]): 120. ; H (Dive height [mm]): 3. ; R (Recovery time [seconds]): 0. ; T (Travel speed [mm/min]): 6,000. ; A (Max number of times to probe each point): 1. ; B (Heaters): 0 (Leave all heaters on while probing). ; C (Endstop input): 0. (Mainboard) io4.in. M950 S0 C"0.io4.out" ; Create GPIO/servo pin. ; S (Output/servo pin number): 0. ; C (Pin name): 0. (Mainboard) io4.out. G31 P500 X0 Y22.0 Z3.105 K0 ; Set Z probe. ; P (Trigger value): 500. ; X (Probe X offset [mm]): 0. ; Y (Probe Y offset [mm]): 22.000. ; Z (Probe Z offset [mm]): 3.105 (This is modified for Z probe calibration. A higher offset number moves the nozzle closer to the bed.). ; K (Z probe number): 0. M557 X25:325 Y25:313.5 P3 ; Define Z probe mesh grid (This is the probe point grid, not the nozzle grid). ; X (Min:Max X coordinates to probe [mm]): 35 (Min) : 325 (Max). ; Y (Min:Max Y coordinates to probe [mm]): 25 (Min) : 313.5 (Max). ; P (Points to probe in each direction): 3. ; Heater, Bed M308 S0 P"0.temp0" Y"thermistor" A"Bed Temp" T100000 B3950 C0 R2200 ; Set (Bed) temperature sensor parameters. ; S (Sensor number): 0. ; P (Pin name): 0. (Mainboard) temp0. ; Y (Sensor type): thermistor. ; A (Sensor name): Bed Temp. ; T (Thermistor resistance at 25 deg C): 100,000. ; B (Beta value): 3950. ; C (Coefficient): 0. ; R (Series resistor value): 2200 (Default for Duet3). M950 H0 C"0.out0" Q10 T0 ; Create heater (Bed). ; H (Heater number): 0. ; C (Pin name): 0. (Mainboard) out0. ; Q (PWM frequency [Hz]): 10 (Due to solid state relay). ; T (Temperature sensor number): 0 (bed). M307 H0 R0.660 C320.2 D1.62 I0 B0 S1.0 V0 ; Set heating process parameters. ; H (Heater number): 0 (Bed). ; R (Heating rate): 0.660. ; C (Dominant time constant of heating process [seconds]): 320.2. ; D (Dead time [seconds]): 1.62. ; I (Invert PWM signal): 0 (Not inverted). ; B (Bang bang control): 0 (Disabled). ; S (Maximum PWM frequency to use): 1.00. ; V (Vin calibration supply voltage): 0 (Mains heater). M140 H0 ; Configure bed heater. ; H (Heater number): 0 (Bed). M143 H0 S160 ; Set maximum heater temperature. ; H (Heater number to monitor): 0 (Bed). ; S (Maximum permitted temperature [deg C]): 160. ; Heater, Extruder 1 M308 S1 P"0.temp1" Y"thermistor" A"Extr. 1 Temp" T100000 B4725 C7.06e-8 ; Set (Extruder 1) temperature sensor parameters. ; S (Sensor number): 1 (Extruder 1). ; P (Pin name): 0. (Mainboard) temp1. ; Y (sensor type): thermistor. ; A (Sensor name): Extr 1. Temp. ; T (Thermistor resistance at 25 deg C): 100,000. ; B (Beta value): 4725. ; C (Coefficient): 7.06e-8. M950 H1 C"0.out1" Q500 T1 ; Create heater (Extruder 1). ; H (Heater number): 1. ; C (Pin name): 0. (Mainboard) out1. ; Q (PWM frequency [Hz]): 500 (Default). ; T (Temperature sensor number): 1. M307 H1 R2.500 C378.6:159.6 D4.08 I0 B0 S1.00 V24.0 ; Set heating process parameters (auto tune performed at 240 C). ; H (Heater number): 1. ; R (Heating rate): 2.700 (decrease this by 30% if a heater temperature error shows up). ; C (Dominant cooling time constant of heating process [seconds]): 400.6 (print fans off) : 158.6 (print fans fully on). ; D (Dead time [seconds]): 4.15. ; I (Invert PWM signal): 0 (Not inverted). ; B (Bang bang control): 0 (Disabled). ; S (Maximum PWM frequency to use): 1.00. ; V (Vin calibration supply voltage): 24.0. M143 H1 S285 ; Set maximum heater temperature. ; H (Heater number to monitor): 1 (Extruder 1). ; S (Maximum permitted temperature [deg C]): 285 (Due to max thermistor temperature). ; Fan, Print Cooling M950 F0 C"0.out4" Q100 ; Create fan. ; F (Fan number): 0. ; C (Pin name): 0. (Mainboard) out4. ; Q (PWM frequency [Hz]): 100 (60 is too low, 800 is too high). M106 P0 L0.2 X1.0 B0.3 H-1 R1 C"Print Fan" ; Set fan. ; P (Fan number): 0 (Print/part cooling). ; L (Minimum fan speed): 0.2. ; X (Maximum fan speed): 1.0. ; B (Blip time [seconds]): 0.3. ; H (Thermostatic control): -1 (Disabled). ; R (Restore fan speed): 1 (To the value it has when the print was paused). ; C (Name): Print Fan. ; Fan, Heat Break M950 F1 C"0.out5" Q25000 ; Create fan. ; F (Fan number): 1. ; C (Pin name): 0. (Mainboard) out5. ; Q (PWM frequency [Hz]): 25,000. M106 P1 S1.0 L0.5 X1.0 B0.3 H1 T45 C"Heat Break Fan" ; Set fan. ; P (Fan number): 1 (Heat break). ; S (Fan speed): 1.0. ; L (Minimum fan speed): 0.5. ; X (Maximum fan speed): 1.0. ; B (Blip time [seconds]): 0.3. ; H (Thermostatic control): 1 (Enabled). ; T (Thermostatic mode trigger temperature [C]): 45. ; C (Name): Heat Break Fan. ; Fans, Case M308 S2 Y"drivers" A"Driver Temp" ; Set (stepper drivers) temperature sensor. ; S (Sensor number): 2. ; Y (Sensor type): drivers (Mainboard stepper drivers). ; A (Sensor name): Driver Temp. M308 S3 Y"mcu_temp" A"CPU Temp" ; Set (CPU/MCU) temperature sensor. ; S (Sensor number): 3. ; Y (Sensor type): mcu_temp (CPU/MCU). ; A (Sensor name): CPU Temp. M950 F2 C"0.out6" Q25000 ; Create fan. ; F (Fan number): 2 (Case fan). ; C (Pin name): 0. (Mainboard) out6. ; Q (PWM frequency [Hz]): 25,000. M106 P2 L0.8 X1.0 B0.1 H2:3 T40:65 C"Case Fans" ; Set fan. ; P (Fan number): 2 (Electronics). ; L (Minimum fan speed): 0.8. ; X (Maximum fan speed): 1.0. ; B (Blip time [seconds]): 0.1. ; H (Thermostatic control): 2 (stepper drivers) : 3 (CPU/MCU). ; T (Thermostatic trigger temperature [C]: 40-65 (Proportional range). ; C (Name); Case Fans. ; Tools M563 P0 S"Extr. 1 Tool" D0 H1 F0 ; Define tool. ; P (Tool number): 0 (Extruder 1). ; S (Tool name): Extr. 1 Tool. ; D (Extruder drive): 0 (defined in M584 as E1.0). ; H (Heater): 1 (Extruder 1, defined in M950 H1). ; F (Fan mapped): 0 (Print/part cooling fan). G10 P0 X0 Y0 Z0 R0 S0 ; Set tool offset and temperature. ; P (Tool number): 0. ; X (X offset): 0. ; Y (Y offset): 0. ; Z (Z offset): 0. ; R (Standby temperature): 0. ; S (Active temperature: 0. ; Display M575 P1 S1 B57600 S1 ; Set serial communications parameters. ; P (Serial channel number): 1 (Auxiliary serial port). ; B (Baud rate): 57,600 (PanelDue default). ; S (Mode): 1 (PanelDue, checksum required). ; Automatic Power Saving M911 S21.0 R22.0 P"M913 X0 Y0 G91 M83 G1 Z3 E-2 F1000" ; Set auto save on power loss. ; S (Auto save threshold [V]): 21.0. ; R (Resume threshold [V]): 22.0. ; P (Commands on power loss): ... ; CPU Temperature Compensation M912 P0 S00.0 ; Set electronics temperature monitor adjustment. ; P (Temperature monitor channel): 0 (Default). ; S (Value to be added to temperature reading [C]): 00.0 (Lower number decreases displayed cpu temperature. =[(temperature_actual)-(temperature_indicated)]). ; Pressure Advance M572 D0 S0.05 ; Set extruder pressure advance (Linear advance). ; D (Extruder number): 0 (Extruder 1). ; S (Pressure advance amount [seconds]): 0.05. ; Select Tool T0 ; Select first tool. -
@phaedrux said in BLTouch Probe Won't Deploy:
What exactly do you have in your deployprobe.g and retractprobe.g files in the sys folder?
deployprobe.g (changed from deployprobe0.g in case this was a part of the issue)
; Voron ; 0:/sys/deployprobe0.g ; Deploy probe file for Duet 3 (firmware version 3.3). ; Called to deploy BLTouch probe via M401. ; 2021/06/30/16:14 M280 P0 S10 ; Set servo position. ; P (Servo index): 0 (Based on config.g, Z Probe, M950 S command). ; S (Servo angle): 10.retractprobe.g (changed from retractprobe0.g in case this was a part of the issue)
; Voron ; 0:/sys/retractprobe0.g ; Retract probe file for Duet 3 (firmware version 3.3). ; Called to retract BLTouch probe via M402. ; 2021/06/30/16:14 M280 P0 S90 ; Set servo position. ; P (Servo index): 0 (Based on config.g, Z Probe, M950 S command). ; S (Servo angle): 90. -
@phaedrux said in BLTouch Probe Won't Deploy:
Does M401 and M402 work to deploy or retract the probe?
Yes, it does.
-
@phaedrux said in BLTouch Probe Won't Deploy:
Does the probe deploy when you send G30?
No, it does not.
-
@phaedrux said in BLTouch Probe Won't Deploy:
Does the BLTouch pin deploy and retract when power is first applied?
Yes, it goes through a deploy/retract cycle 2 times. Light on BLTouch stays red.
@phaedrux said in BLTouch Probe Won't Deploy:
How exactly is the BLtouch wired?
Wired per Connecting Z Probe: BLTouch For me this is:
White > IO4_IN
Brown and Black tied together > GND
Yellow > IO4_OUT
Red > 5VWire material is BNTECHGO 24 Gauge Silicone Ribbon Cable Flexible Cable 24 AWG . Wired through IGUS cable chain as per Voron requirements.
@phaedrux said in BLTouch Probe Won't Deploy:
And The results of M122 and M98 P"config.g"?
M122
m122 === Diagnostics === RepRapFirmware for Duet 3 MB6HC version 3.3 (2021-06-15 21:45:47) running on Duet 3 MB6HC v1.01 or later (SBC mode) Board ID: 08DJM-956L2-G43S8-6J9DG-3S46T-KV2LF Used output buffers: 1 of 40 (10 max) === RTOS === Static ram: 150904 Dynamic ram: 62124 of which 132 recycled Never used RAM 141032, free system stack 202 words Tasks: SBC(ready,4.9%,338) HEAT(delaying,0.0%,325) Move(notifyWait,0.0%,302) CanReceiv(notifyWait,0.0%,908) CanSender(notifyWait,0.0%,374) CanClock(delaying,0.0%,343) TMC(notifyWait,7.1%,93) MAIN(running,87.9%,922) IDLE(ready,0.0%,29), total 100.0% Owned mutexes: HTTP(MAIN) === Platform === Last reset 00:14:41 ago, cause: power up Last software reset at 2021-12-10 15:06, reason: User, none spinning, available RAM 141032, slot 0 Software reset code 0x0012 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0440f000 BFAR 0x00000000 SP 0x00000000 Task SBC Freestk 0 n/a Error status: 0x00 Aux0 errors 0,0,1 Step timer max interval 134 MCU temperature: min 36.3, current 45.8, max 46.1 Supply voltage: min 24.0, current 24.0, max 24.0, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.0, current 12.1, max 12.1, under voltage events: 0 Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0 Driver 0: position 0, standstill, reads 22196, writes 14 timeouts 0, SG min/max 0/0 Driver 1: position 0, standstill, reads 22196, writes 14 timeouts 0, SG min/max 0/0 Driver 2: position 0, standstill, reads 22196, writes 14 timeouts 0, SG min/max 0/0 Driver 3: position 0, standstill, reads 22196, writes 14 timeouts 0, SG min/max 0/0 Driver 4: position 0, standstill, reads 22196, writes 14 timeouts 0, SG min/max 0/0 Driver 5: position 0, standstill, reads 22197, writes 14 timeouts 0, SG min/max 0/0 Date/time: 2021-12-10 15:31:52 Slowest loop: 0.46ms; fastest: 0.04ms === Storage === Free file entries: 10 SD card 0 not detected, interface speed: 37.5MBytes/sec SD card longest read time 0.0ms, write time 0.0ms, max retries 0 === Move === DMs created 125, maxWait 0ms, bed compensation in use: none, comp offset 0.000 === MainDDARing === Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === AuxDDARing === Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters = 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamberHeaters = -1 -1 -1 -1 Heater 1 is on, I-accum = 0.0 === GCodes === Segments left: 0 Movement lock held by null HTTP* is doing "M122" in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is assembling a command in state(s) 0 Trigger* is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty. === CAN === Messages queued 7844, received 7, lost 0, longest wait 1ms for reply type 6042, peak Tx sync delay 57573, free buffers 49 (min 48), ts 4410/4406/0 Tx timeouts 0,0,3,0,0,0 last cancelled message type 30 dest 127 === SBC interface === State: 4, failed transfers: 1, checksum errors: 0 Last transfer: 2ms ago RX/TX seq numbers: 30678/30678 SPI underruns 0, overruns 0 Disconnects: 0, timeouts: 0, IAP RAM available 0x2c83c Buffer RX/TX: 0/0-0 === Duet Control Server === Duet Control Server v3.3.0 Code buffer space: 4096 Configured SPI speed: 8000000Hz Full transfers per second: 29.79, max wait times: 9.3ms/0.0ms Codes per second: 0.06 Maximum length of RX/TX data transfers: 2984/284M98 P"config.g"
M98 P"config.g"Looks like it runs successfully. CPU temp sensor raises from 45.8C to 2000.0C for less than a second while performing this.
@phaedrux said in BLTouch Probe Won't Deploy:
Also send M558, G31, by themselves are see what they return.
M558
M558 Z Probe 0: type 9, input pin io4.in, output pin nil, dive height 3.0mm, probe speeds 120,120mm/min, travel speed 6000mm/min, recovery time 0.00 sec, heaters normal, max taps 1, max diff 0.03G31
G31 Z probe 0: current reading 0, threshold 500, trigger height 3.105, offsets X0.0 Y22.0 -
@joergs5 said in BLTouch Probe Won't Deploy:
The code is in GCodes3.cpp DeployZProbe() and RetractZProbe(), and looks ok.
Im not sure what this means. Please let me know if you would like to provide more information.
")
-
@joergs5 said in BLTouch Probe Won't Deploy:
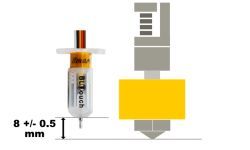
maybe your BLtouch is too near to the bed, please check
The print head is currently sitting around 200mm from the build plate (to prevent crashing).
BLTouch Body currently sits around 7.6mm from the bed (with the nozzle touching the bed). The pin in its retracted position sits around 2.1mm from the bed (with the nozzle touching the bed).
-
@charlie said in BLTouch Probe Won't Deploy:
@phaedrux said in BLTouch Probe Won't Deploy:
Does M401 and M402 work to deploy or retract the probe?
Yes, it does.
In this case, I think the issue is the K0. If you're going to use K0 in your config you're going to have to use it consistently. Your homing file doesn't specify the probe number when you use G30.
@charlie said in BLTouch Probe Won't Deploy:
M558 F600 H2 A1 ; Set Z probe. Feed rate: 600 mm/min. Dive height: 2 mm. Times to probe: 1.
G30 ; Z probe quickly (1 of 2 passes).
M558 F120 H5 A1 ; Set Z probe. Feed rate: 120 mm/min. Dive height: 5 mm. Times to probe: 1.
G30 ; Home Z by probing the bed slowly (2 of 2 passes).The G30 and M558 here must have K0 specified if you're going to use that.
https://duet3d.dozuki.com/Wiki/G30
Either remove all instances of K0 from your config and leave the deployprobe.g and retractprobe.g named as such, or convert entirely to using the number probe format. Meaning use retractprobe0.g etc and when using any M558/G30/G31 command elsewhere you must also specify K0.
I think since you only have a single probe it would be best to jsut remove all instances of K0.
