Solved BL Touch not working
-
Hello,
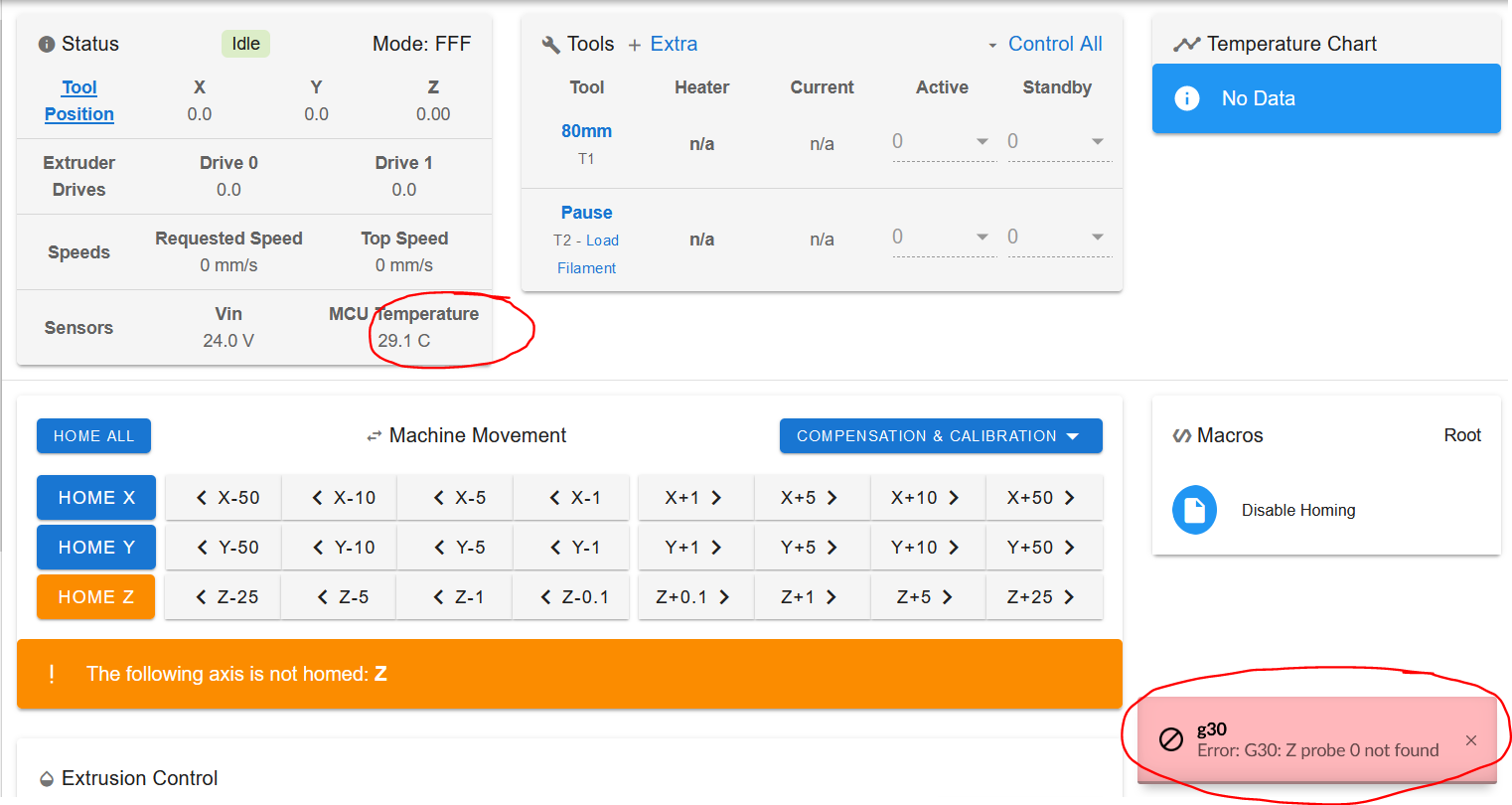
I am trying to replace a capacitive sensor with a BL Touch. For some reason I cannot get it to work as the sensor does not show in the dashboard and I get an error message ("Error: G30: Z probe 0 not found").
Also I cannot get the system to release the pin via "M280 P7 S10" or retract it via "M280 P7 S90" for obvious reasons.
This is my setup:
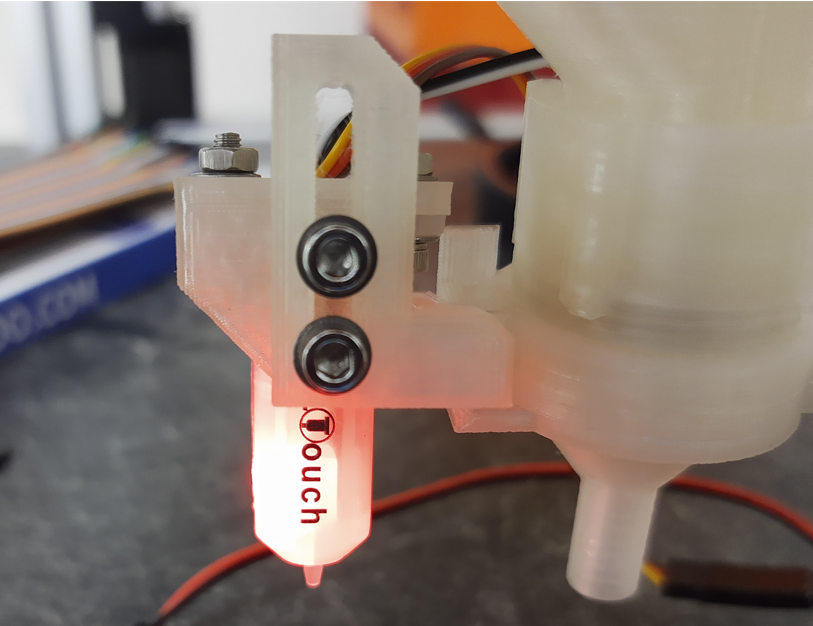
- BL Touch v3.1
- Firmware Duet 3.3 (Release)
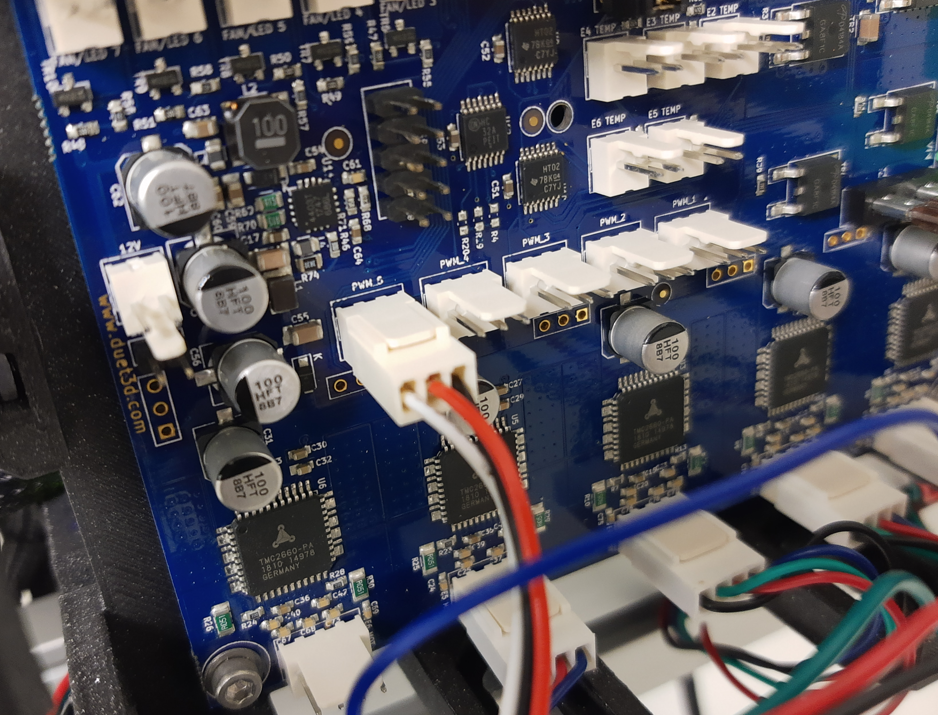
- Duet2 & Duex5 expansion board
- Self-tests fine when Duet is powered on, LED light turns on as well.
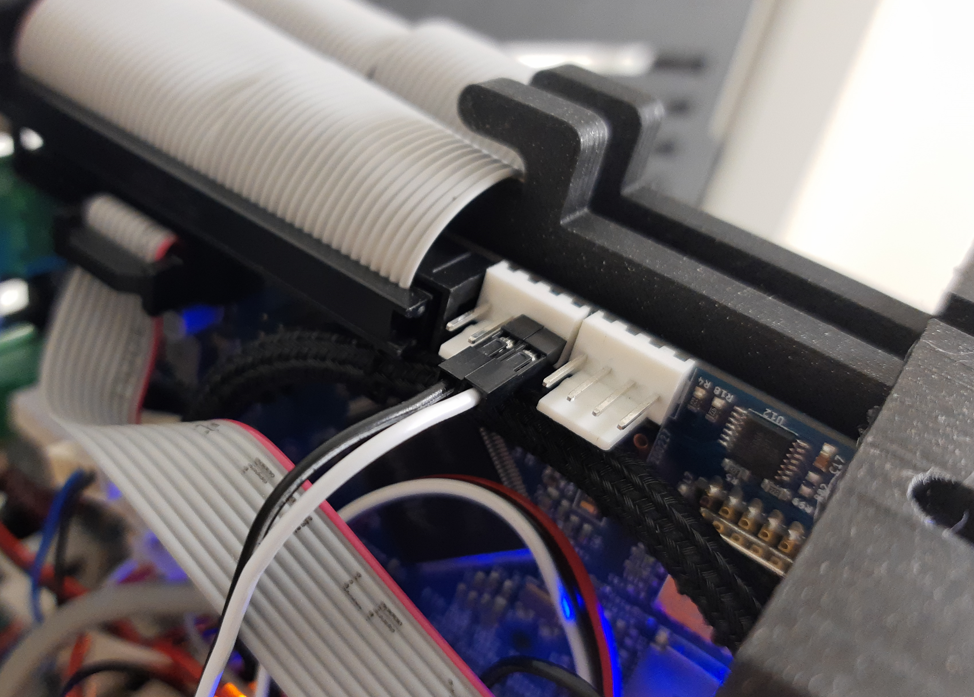
- Wiring checked multiple times!
- Heater 7 (PWM_5) used on the Duex5 expansion board.
- The 5V jumper on the Duex5 is set.
These are the guides I followed (to the letter):
config.g:
; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"Clayster" ; set printer name M302 P1 ; enable cold extrusion for clay printing ; Network M552 S1 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0 S1 ; X1 M569 P1 S1 ; Y (reversed) M569 P2 S0 ; Z1 M569 P3 S1 ; E0 (Extruder, reversed) M569 P4 S1 ; E1 (Ram, reversed) M569 P5 S0 ; Z2 M569 P6 S0 ; Z3 M569 P7 S0 ; X2 M569 P8 S0 ; Z4 M569 P9 S0 ; n/a M584 X0:7 Y1 Z2:5:6:8 E3:4 ; remap motors M350 X16 Y16 Z16 E8:16 I1 ; configure microstepping with interpolation M92 X100.00 Y100.00 Z1600.00 E1000.00:1000.00 ; set steps per mm M566 X500.00 Y500.00 Z20.00 E1000.00:500.00 ; set maximum instantaneous speed changes (mm/min) M203 X5000.00 Y5000.00 Z600.00 E6000.00:400.00 ; set maximum speeds (mm/min) M201 X150.00 Y200.00 Z500.00 E1000.00:500.00 ; set accelerations M906 X1200 Y1200 Z500 E2000:2000 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; set idle timeout ; Axis Limits M208 X0:390 Y0:365 Z0:350 S1 ; 390mm x 365mm x 350mm ; Bed leveling geometry & leveling M671 X470:470:-70:-70 Y400:-40:400:-40 S20 ; position leadscrews (S = adjust max.) ; Endstops M574 X1 S1 P"xstop+e0stop" ; configure active-low endstop for 2 X-motors M574 Y1 S1 P"ystop" ; configure active-low endstop for low end on Y via pin ystop ; Filament sensor for Ram M591 P1 C"e1stop" S1 D1 ; extruder (Ram) endstop ; Miscellaneous M575 P1 S1 B57600 ; enable support for PanelDue ; Tool 1 (Ram 80mm) M563 P1 D0:1 S"80mm" ; enable tool 1 and extruder E0 (D0) & E1 (D1) M567 P1 E1.00:0.03200 ; mixing ratio (77% more volume) G10 P1 S0 R0 X0 Y0 ; axis offsets for extruder G10 P1 R0 S0 ; set extruders active and standby temperature to 0 Celsius ; Tool 2 ("Pause") M563 P2 D1 S"Pause" ; retract ram motor when ram endstop is triggered ; Enable moving of axes before homing M564 H0 S1 ; S0 = move beyond axis limits, H0 = move without homing ; BL Touch M307 H7 A-1 C-1 D-1 ; disable heater 7 M558 P9 H5 F500 T2000 B1 ; P = Z probe type 9, H = dive height, F = speed G31 P25 X0 Y-35 Z0.0 ; Z probe trigger value, offset in relation to nozzleretractprobe.g:
M280 P7 S90deployprobe.g:
M280 P7 S10Here are a few more pictures:
-
I have one working fine, but a different board..
Have a look through the appropriate parts of the main Z Probe page; it says what connectors are usable for a BLTouch on different boards & mentions jumper settings etc.
-
Thank you, Robert, that was good call. I made sure the appropriate jumper is set, so heater 7 supplies 5V. I also double-checked the wiring and it's all according the document you provided.
So I am still where I am...
-
Which version of RRF are you using, ver 2? I can't see that you've mentioned it.
EDIT: OK, so you're using RRF 3.3
Then I think you should config the BLTouch differently:
Have you read this bit, "Software setup (RepRapFirmware 3)" for the https://duet3d.dozuki.com/Wiki/Connecting_a_Z_probe
Either I'm a sloppy reader or I can't see that you have the M950
AS in this example:
2. Create a GPIO/Servo pin index using your chosen control pin, for example:M950 S0 C"io7.out" ; Duet 3 MB6HC
M950 S0 C"io3.out" ; Duet 3 Mini 5+
M950 S0 C"exp.heater3" ; Duet 2 WiFi/Ethernet
M950 S0 C"duex.pwm1" ; Duet 2 WiFi/Ethernet + DueX2/5
M950 S0 C"!exp.heater6" ; Duet 2 WiFi/Ethernet + BoB
M950 S0 C"zprobe.mod" ; Duet 2 Maestro -
@gixxerfast said in BL Touch not working:
Which version of RRF are you using, ver 2? I can't see that you've mentioned it.
EDIT: OK, so you're using RRF 3.3
Then I think you should config the BLTouch differently:
Have you read this bit, "Software setup (RepRapFirmware 3)" for the https://duet3d.dozuki.com/Wiki/Connecting_a_Z_probe
Either I'm a sloppy reader or I can't see that you have the M950
AS in this example:
2. Create a GPIO/Servo pin index using your chosen control pin, for example:M950 S0 C"io7.out" ; Duet 3 MB6HC
M950 S0 C"io3.out" ; Duet 3 Mini 5+
M950 S0 C"exp.heater3" ; Duet 2 WiFi/Ethernet
M950 S0 C"duex.pwm1" ; Duet 2 WiFi/Ethernet + DueX2/5
M950 S0 C"!exp.heater6" ; Duet 2 WiFi/Ethernet + BoB
M950 S0 C"zprobe.mod" ; Duet 2 MaestroThank you, that did the trick! I must have overseen that section and used outdated sources. There are so many out there, you don't see the wood for the trees.
Also my deployprobe.g and retractprobe.g files referenced P7 rather than P0 as was mentioned in one of the guides. But these files reference the probe input rather than the heater, so P0 is the correct setting.
These are the correct settings and corresponding files:
config.g
; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"Clayster" ; set printer name M302 P1 ; enable cold extrusion for clay printing ; Network M552 S1 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0 S1 ; X1 M569 P1 S1 ; Y (reversed) M569 P2 S0 ; Z1 M569 P3 S1 ; E0 (Extruder, reversed) M569 P4 S1 ; E1 (Ram, reversed) M569 P5 S0 ; Z2 M569 P6 S0 ; Z3 M569 P7 S0 ; X2 M569 P8 S0 ; Z4 M569 P9 S0 ; n/a M584 X0:7 Y1 Z2:5:6:8 E3:4 ; remap motors M350 X16 Y16 Z16 E8:16 I1 ; configure microstepping with interpolation M92 X100.00 Y100.00 Z1600.00 E1000.00:1000.00 ; set steps per mm M566 X500.00 Y500.00 Z20.00 E1000.00:500.00 ; set maximum instantaneous speed changes (mm/min) M203 X5000.00 Y5000.00 Z600.00 E6000.00:400.00 ; set maximum speeds (mm/min) M201 X150.00 Y200.00 Z500.00 E1000.00:500.00 ; set accelerations (mm/s^2) M906 X1200 Y1200 Z500 E2000:2000 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; set idle timeout ; Axis Limits M208 X0:390 Y0:365 Z0:350 S1 ; 390mm x 365mm x 350mm ; Bed leveling geometry & leveling M671 X470:470:-70:-70 Y400:-40:400:-40 S20 ; position leadscrews (S = adjust max.) ; Endstops M574 X1 S1 P"xstop+e0stop" ; configure active-low endstop for 2 X-motors M574 Y1 S1 P"ystop" ; configure active-low endstop for low end on Y via pin ystop ; Filament sensor for Ram M591 P1 C"e1stop" S1 D1 ; extruder (Ram) endstop ; Z-Probe (capacitive sensor) ;M558 P5 C"^!zprobe.in" I1 ; default travel (5mm) ;G31 P1000 X0 Y0 Z0.475 ; Z = offset (greater value = closer to bed) ; Miscellaneous M575 P1 S1 B57600 ; enable support for PanelDue ; Tool 1 (Ram 80mm) M563 P1 D0:1 S"80mm" ; enable tool 1 and extruder E0 (D0) & E1 (D1) M567 P1 E1.00:0.03200 ; mixing ratio (77% more volume) G10 P1 S0 R0 X0 Y0 ; axis offsets for extruder G10 P1 R0 S0 ; set extruders active and standby temperature to 0 Celsius ; Tool 2 ("Pause") M563 P2 D1 S"Pause" ; retract ram motor when ram endstop is triggered ; Enable moving of axes before homing M564 H0 S1 ; S0 = move beyond axis limits, H0 = move without homing ; BL Touch M950 S0 C"duex.pwm5" ; assign heater 7 on the Duex5 to BL touch M558 P9 C"^zprobe.in" H5 F500 T6000 ; P = Z probe type 9, H = dive height, F = speed G31 P25 X0 Y-36 Z0.0 ; Z probe trigger value, offset in relation to nozzledeployprobe.g
M280 P0 S10retractprobe.g
M280 P0 S90Thank you for your help! You made my day!
-
 undefined wieman01 marked this topic as a question
undefined wieman01 marked this topic as a question
-
undefined wieman01 has marked this topic as solved