Machine coordinates, possibilities to set it up (G53 to G59.3)
-
Re: [Toolchanger: Coordinate systems](Z-Probe Offset XY)
Has anyone a solution to my previous thread?
Youre help would be much appreciated.
-
@chuckonelli which thread would that be?
RRF supports G53 to G59.3. It also supports a mechanism for defining tool offsets. See https://duet3d.dozuki.com/Wiki/G10#Section_G10_Set_workplace_coordinate_offset_or_tool_offset.
-
@chuckonelli I assume you mean this thread:
https://forum.duet3d.com/topic/24885/toolchanger-coordinate-systems-z-probe-offset-xy/1
to achieve what you want you can set your Z probe offsets (using G31 X, Y,Z co prdinates as you need)
Set your tool offsets using G10, one per tool
https://duet3d.dozuki.com/Wiki/G10#Section_G10_Set_workplace_coordinate_offset_or_tool_offsetThen within your tpreN.g files you will be working with the co-ordinate system with no tool offsets applied. In the tpostN.g files and tpreN.g files use G53 to define the co-ordinates without the tool offsets applied as well:
G53 G1 Xnn Ynn -
@t3p3tony Yes right, that's the one I was referring to, thank you for your answer.
My main goal is basically:
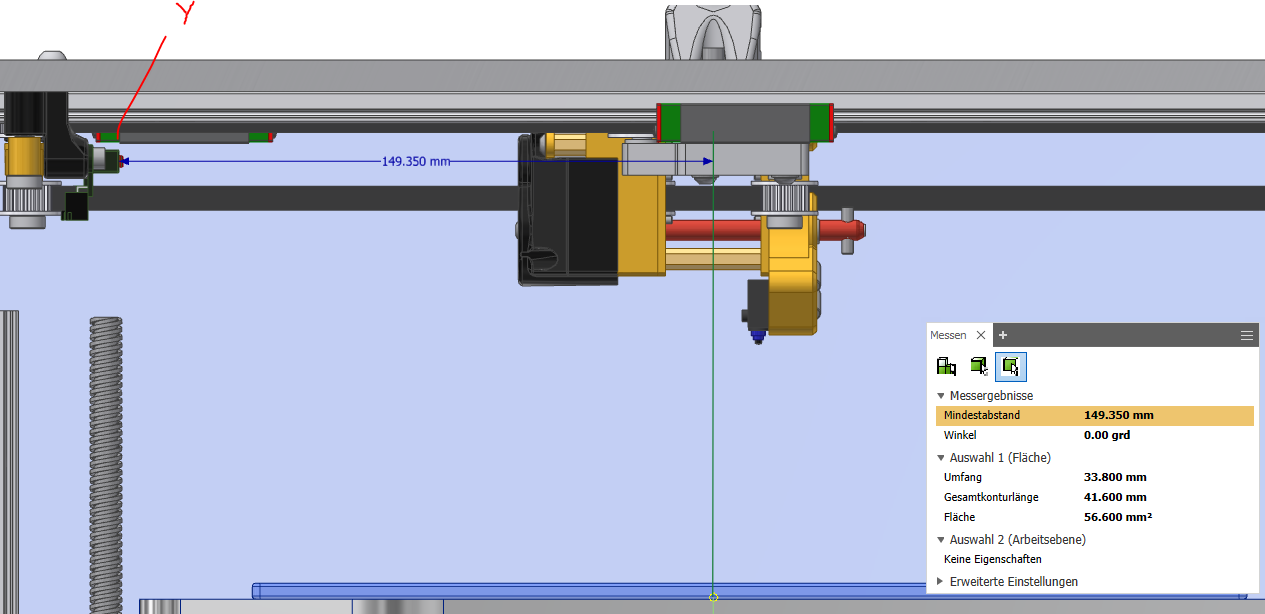
My main coordinate system (G53) is in the middle of the kinematic coupling of the bed. Therefore I set ''offset'' values of the X- and Y-Endstop accordingly:
For the X-Endstop position approx:
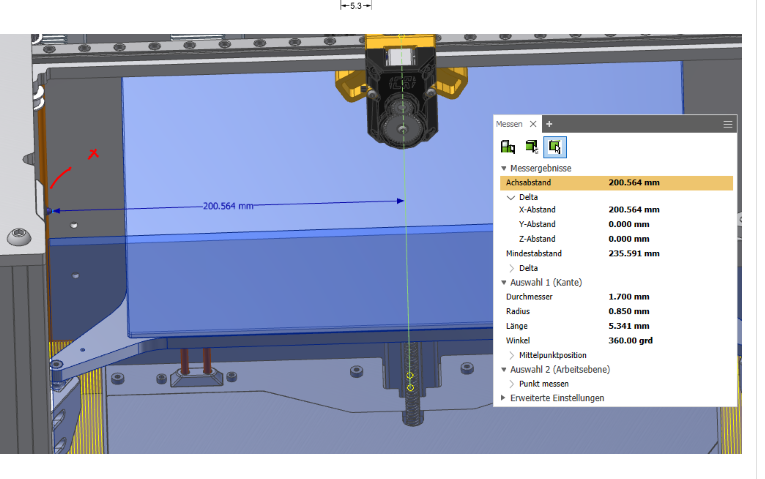
For the Y-Endstop position approx:
I would assume that the Z-Direction isn't relevant in this stage (because of the Z-Endstop of the toolhead)
For the Probing of the bed I want to ''activate'' the 2nd coordinate system with the Z-Probe offsets activated and set the offset of the probe relative to the main coordinate system (G53)
My normal use case should look like this:
Homing:
- Homing of the XY-Axis -> Sets the origin of the machine (XY-values)
- Homing of the Z-Axis -> Sets the origin of the machine (z-value)
-> G53 main coordinate system is set
True bed leveling (G32):
- Activate Z-Probe offset -> As you wrote set by G31 X Y Z (X and Y according to my drawing, and Z zero because same value as used for inital homing)
- Execution of bed leveling sequence
- Execution of correction (independent z motors are correction the tilt)
- Re-activating the Z-Probe offset
Picking up tools:
- G53 X Y position of tooldock (for example tooldock 1) -> Tpre and Tpost definition
- G53 X Y picking up tool
- Tool picked up -> Tooloffset gets activated (in this example of Tool 1) -> Defined by configuration G10 T1 XY-Values relative to G53 and so on
Do I understand this right?