Duet3D 1HCL - Closed Loop Controller Beta test
-
@dc42 I’d like to order some as well when they become available. Please let us know if we can pre-order.
Also, could you describe in more detail the issues with closed loop corexy that you mentioned?
I would be willing to help beta test the corexy functionality if that would help.
Thanks and look forward to the boards,
Tristan -
@dc42
Ok I understand.
For me it's no option to change the style of the x axis (double shaft nema17) I must work with an external encoder.
I'm happy to hear that duet will sell this board in the next months.
Would like to have a few of this little fun maker.
Please give us a sign when we can order some.
Thanks a lot
Richard -
The first small production run of the EXP1HCL is currently undergoing testing by our assemblers. We should know more on Monday.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42
Sounds great!!!
Thanks for updating usCheers
Richard -
I am keen to get two as well. I have the 48v power supply just need the boards now
-
@samlogan87
what is the benefit of 48 volt?cheers
richard -
@gruna-studio you are able to run it much faster
-
@samlogan87
really? the motors can drive faster?since two years I´m working with 3d printers and duet and I never heard about it. haha
Is there a good summary from Duet?
Today is "1HCL-Monday". !!!!
cheers richard
-
@gruna-studio driving stepper motors at the desired current depends on having enough driver supply voltage to overcome the back EMF of the motors, which increases with speed. It's especially important with high inductance and high current motors. You can estimate the voltage needed using the calculator at https://www.reprapfirmware.org/emf.html.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42
ok thanks a lot! -
@dc42
any good news?
-
@gruna-studio i know. I am hanging out for them. I have money burning a hole in my pocket
-
@dc42
Hey any good news?
Cheers
Richard -
@gruna-studio yes! finally over the bottle neck. drop me a line tony@duet3d.com as you have been waiting a while so we may be able to supply directly from next week (before we can get any to our resellers). also @samlogan87
Note support for these is still experimental in RRF 3.4
-
yeeeeah!
thanks a lot.So there is the first question.
Is there any experience with specific encoders I could use?
Is this an actual information?
If there is no picture yet, I can provide you some good ones and other documentations.
Thanks a lot
Richard -
@T3P3Tony awesome. Sent you an email regarding getting some boards
-
@gruna-studio the SPI connected encoders are not yet fully supported. we have done some limited testing but for now I recommend using quadrature encoders.
-
@gruna-studio the encoders we have had most success with are the 1000 PPR (4000 CPR) ones built-into some 1.8deg stepper motors. There are some examples at https://www.omc-stepperonline.com/closed-loop-stepper-motor/.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
OK... nice to know. Can´t wait to install it.
")
My X-axis works with an double shaft nema 17 who has belts on both ends. So I can´t ( at the moment) install the a new motor. How about the encoder of stepper online. I guess they´re quiet similar to the build in encoder.. or am I completly wrong?
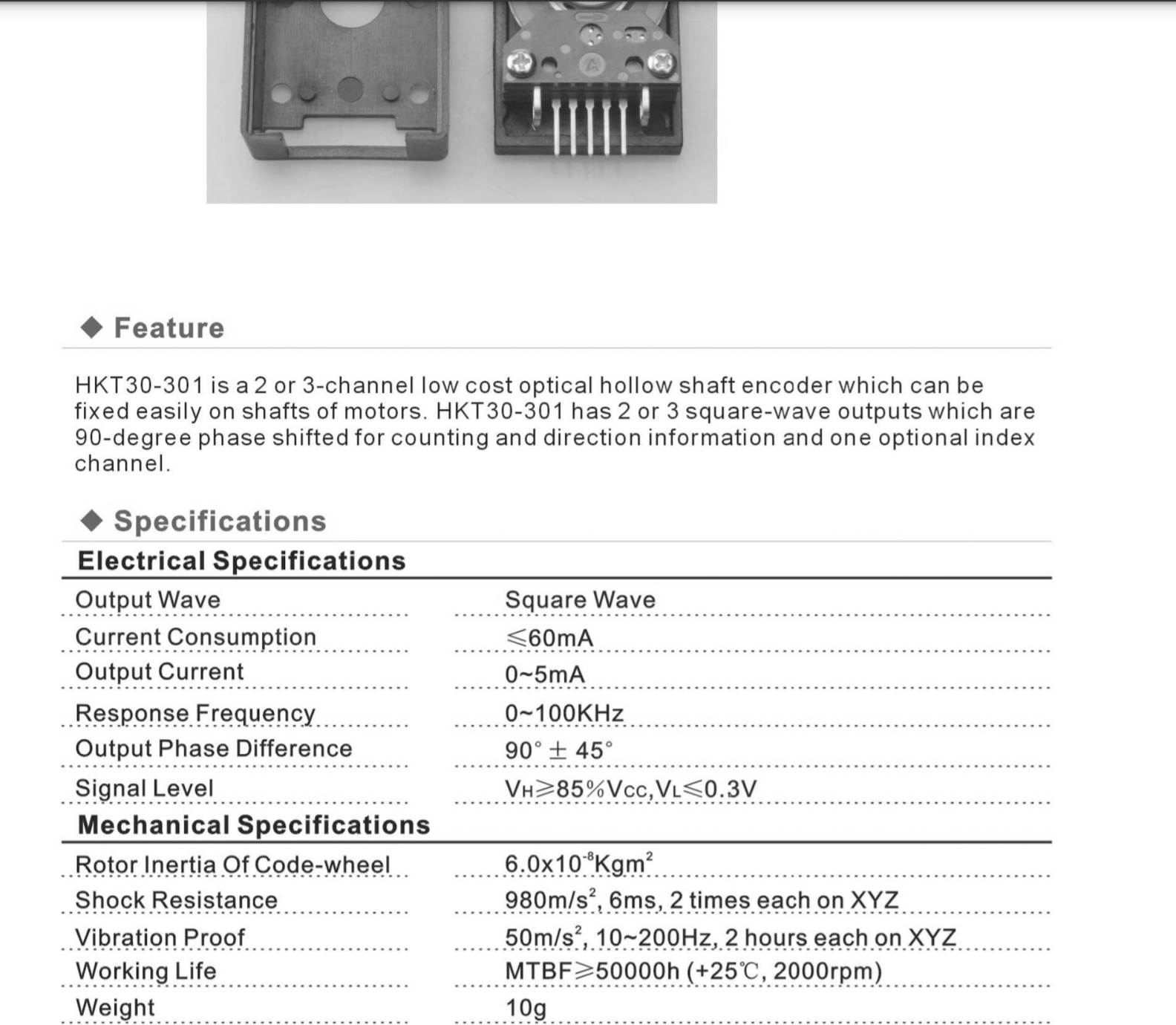
May it´s a cheaper solution to upgrade specific axis.https://www.omc-stepperonline.com/encoder/
This encoder would fit nicely in my system but I`m not sure if this is working in the same way as the built in encoder of stepper online nemas.
cheers Richard
-
@gruna-studio Can you find some place that verifies you can get a 4,000 counts-per-revolution encoder? I looked at their web page and data sheet and I don't get a solid feeling that's true, but it might be true.
I see CPR and LinesPerRev/PulsesPerRev (LPR/PPR) used incorrectly all the time.
If you can only get a 1000 CPR encoder that's going to be too low a resolution to get you good performance. If the data sheet says CPR but they really mean LPR than it's OK, but without buying and testing one you won't know.
SeemeCNC Rostock Max V3 converted to V3.2 with a Duet2 Ethernet Firmware 3.2 and SE300