Duet3D 1HCL - Closed Loop Controller Beta test
-
then I ran a homing sequence which returned the G28 X warning. And again the axis fails to move the drive back to the home position before the Z axis lowers using the Home X example with the V3 maneuver. Maybe I am confused here, the encoder should tell the motor to stay where ever it is when it stopped?
Yup you're absolutely right, the encoder should tell the motor to stay where it is even when it is stopped.
However, what is happening here is that the drive has been (intentionally) disabled because it failed tuning.
When you runM122 B50, you're right that it should say closed loop is enabled, but I suspect it also says something liketuning error: xwhere x is a non-zero value. Wheneverxis non-zero, the drive is disabled because it treats it as a 'fault'. (At the moment this can be quite confusing - we're currently working on a way of making this more obvious such as a pop up in web control saying 'driver fault')
This is also the case forand fails to return X and Y to home location using the homing example listed on the tuning page, however it does lower the Z axis back down at the end of the move
In this case, the X and Y motors have been intentionally disabled because there is a tuning fault - so they will be 'limp'. The z motor however has not been disabled, so that will continue to work.
I'll walk through the x and y axes data that you have collected separately, because I believe they have different issues.
Y-Axis
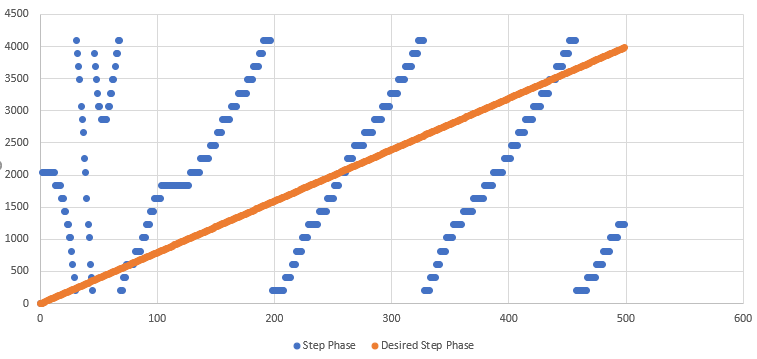
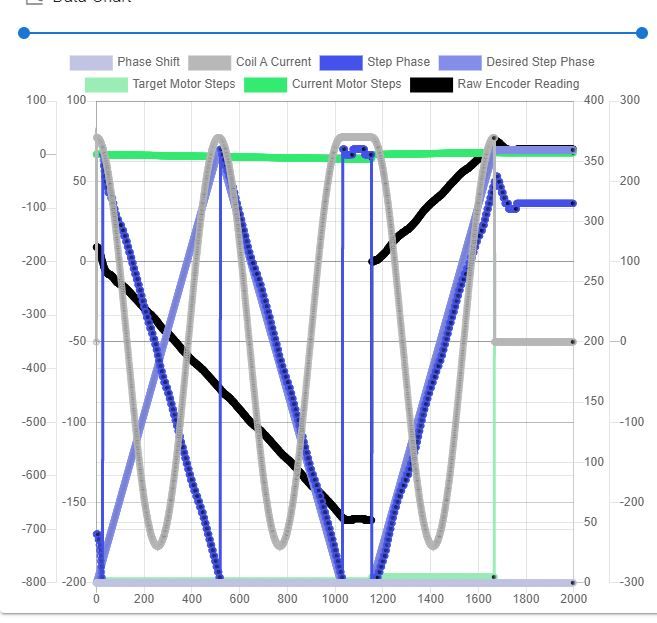
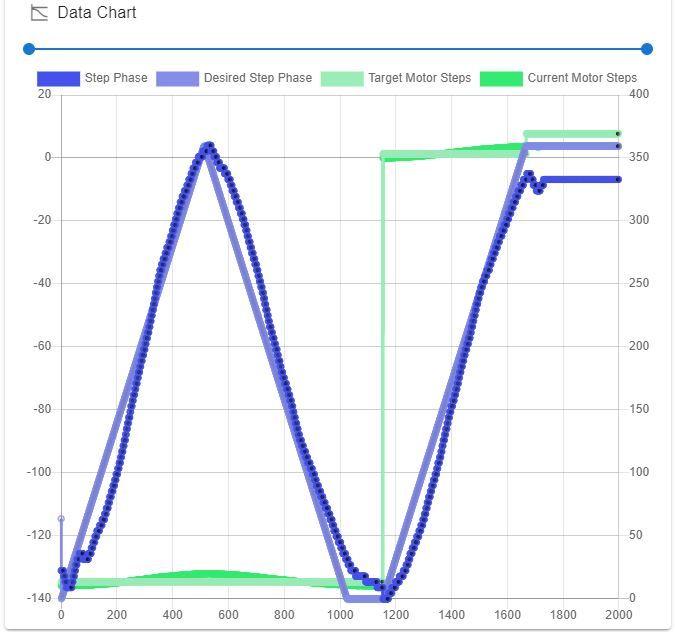
The second reason that tuning might fail is that step phase does not closely track desired step phase.
(For the interested reader, the first reason is that step phase moves in a different direction to desired step phase - e.g. step phase decreases when desires step phase increases)
In this case, step phase is increasing roughly 4x the speed as the desired step phase.
At this point hopefully it becomes evident why we disable the drivers if they fail tuning - in this instance, the motor would move 4x the intended distance - probably smashing into something you don't want to smash into!This is normally caused by the encoder's count per step being set incorrectly (probably out by a factor of 4...)
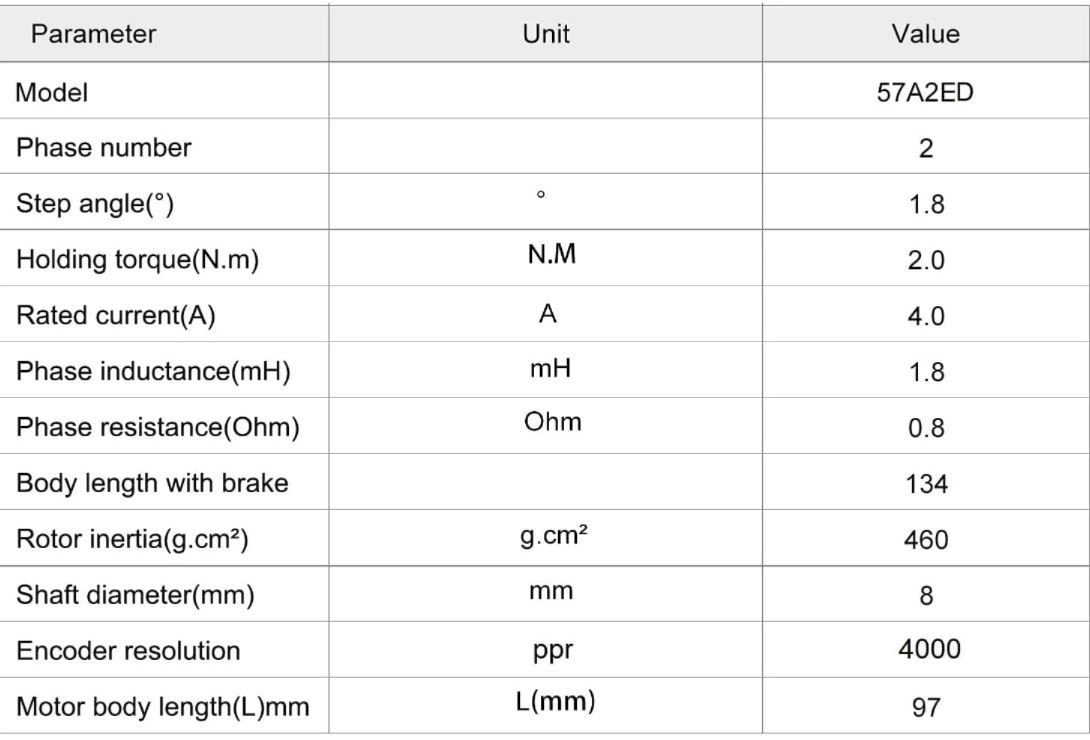
You gave this originally:
Encoder Resolution 4000ppr
I've personally found the units that the manufacturers use to be pretty confusing - this seems to be specified in PPR - pulses per revolution. However, our docs refer to CPR:
Encoder counts per step (Cn.n) can be found from the datasheet of the encoder being used. If the value is stated as counts per revolution (CPR), divide by the steps per revolution of the stepper motor to get the count per step. For example, a 1000 CPR encoder attached to a 200 step/rev motor will have a count per step of 1000 ÷ 200 = 5.
To get from PPR to CPR you divide by 4 (this is probably our factor of 4
 )
)
So your 4000 PPR encoders have a CPR of 1000
You say the motor has 200 steps, so that gives us a count per step of 1000 / 200 = 5
This means your config.g should haveC5in yourM569.1command
If you do, then we need to consider if the motors are actually 4000 PPRX-Axis
Looking at the same graph for the x axis, the motor doesn't seem to be moving at all!
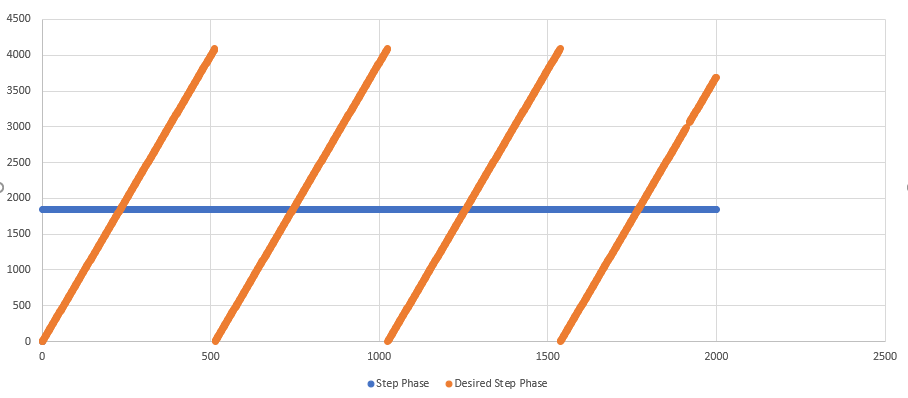
I think the best thing to do is focus on getting Y working, and once it is, we can use the fact you have a working axis to find the fault in the other (perhaps a dodgy wire, motor, encoder or 1HCL board - we can start swapping things around to see what works and what breaks things) -
@lirwin17 ok, We will focus on the Y axis then
here is the current config:
G4 S1 ;wait for expansion boards to start
M569.1 P50.0 T2 C5 E5:10 ; Configure the 1HCL board at CAN address 50 with a quadrature encoder on the motor shaft that has 20 steps per motor full step.
M569.1 P51.0 T2 C5 E5:10 ; Configure the 1HCL board at CAN address 50 with a quadrature encoder on the motor shaft that has 20 steps per motor full step.
M569 P50.0 D4 S1 ; Configure the motor on the 1HCL at can address 50 as being in closed-loop drive mode (D4), Open loop (D2) and not reversed (S1) X axis
M569 P51.0 D4 S1 ; Configure the motor on the 1HCL at can address 51 as being in closed-loop drive mode (D4), Open loop (D2) and not reversed (S1) Y axis
M569 P0.0 S1 ; physical drive 0.0 goes forwards Z 1-2 axis
M569 P0.4 S1 ; physical drive 0.4 goes forwards Extruder
M584 X50.0 Y51.0 Z0.0:0.1 E0.4 ; set drive mapping
M671 X-122.25:689.20 Y0:0 S3.0 ; leadscrews at left (connected to Z0) and right (connected to Z1) of X axis
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X106.5 Y257 Z795.00 E339.00 ; set steps per mm
M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2)
M906 X1000 Y4000 Z3000 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
M917 X0 Y0 ; Set the closed loop axes to have a holding current of zero
51_2021-09-30_09.34.56Y axis.csvM122 B51, Taken after homing maneuver
Diagnostics for board 51:
Duet EXP1HCL firmware version 3.4.0beta3 (2021-08-24 14:56:43)
Bootloader ID: SAME5x bootloader version 2.4beta (2021-07-23)
Never used RAM 52992, free system stack 2579 words
Tasks: Move(notifyWait,0.0%,126) HEAT(notifyWait,0.0%,78) CanAsync(notifyWait,0.0%,70) CanRecv(notifyWait,0.0%,79) CanClock(notifyWait,0.0%,72) TMC(notifyWait,15.5%,26) CLSend(notifyWait,0.0%,130) CLData(notifyWait,0.0%,142) MAIN(running,82.6%,418) IDLE(ready,0.0%,39) AIN(notifyWait,1.9%,265), total 100.0%
Last reset 00:09:14 ago, cause: software
Last software reset time unknown, reason: HardFault bfarValid precise, available RAM 53024, slot 2
Software reset code 0x0060 HFSR 0x40000000 CFSR 0x00008200 ICSR 0x00487803 BFAR 0x20030018 SP 0x2001e658 Task MAIN Freestk 533 ok
Stack: 00000000 2001e70c 20001bac 20030000 0002f65d 0001b621 0001e628 41000000 bf800000 00000000 e2080202 809c0f12 00884802 45a0900e 818917c0 0a003008 62004200 05020070 1084081c 76001303 88124026 41200000 41c1a2e1 41425f6e 20000010 00000002 00000002
Closed loop enabled: yes, live status: 0x4, encoder type linearQuadrature, pre-error threshold: 5.000000, error threshold: 10.000000, coil A polarity: -, coil B polarity: -, tuning: 0, tuning error: 0x18, position -1515847609, raw count = 65526, collecting data: no, ultimateGain=0.000000, oscillationPeriod=0.000000
Driver 0: position -244150, 257.0 steps/mm, standstill, reads 22774, writes 9256 timeouts 0, SG min/max 0/461, steps req 300690 done 82207
Moves scheduled 10, completed 10, in progress 0, hiccups 0, step errors 0, maxPrep 25, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0
Peak sync jitter -4/6, peak Rx sync delay 179, resyncs 0/0, no step interrupt scheduled
VIN: 24.2V, V12: 12.2V
MCU temperature: min 28.8C, current 31.3C, max 33.9C
Ticks since heat task active 120, ADC conversions started 550990, completed 550989, timed out 0, errs 0
Last sensors broadcast 0x00000000 found 0 125 ticks ago, loop time 0
CAN messages queued 6003, send timeouts 0, received 5035, lost 0, free buffers 37, min 37, error reg 0
dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 297, adv 37072/37191RTellegent Nema 23
what steps can I perform to give you the best information to come to a resolution on this drive?
-
I noticed that in the .csv file whenever raw encoder value changes by one, step phase changes by 204.
You can see those large jumps in the graph you posted.
I'm not sure what "Step phase" is, but I see that it wraps at 4096. Is this the actual (calculated) microstep that corresponds to the encoder value? If so, how many microsteps-per-step are you using?
If he's got a 4,000 count-per-rev encoder and a 200 full-step-per-rev motor, as you say, there are 5 encoder counts per motor full-step so if you are counting 200 "Step-phase" units per encoder count, that's 1020 (or 1024) microsteps-per-full-step which seems like a lot.
NOTE: I don't have much insight into what you are doing, or into the code you are using, so even though I'm trying to help here, this might be a complete waste of your time, so PLEASE ignore my ignorance if it's a distraction to you getting your work done.
-
@supertb1 in the M569.1 commands, where you already using C5, or have you just changed them to C5? If you were already using C5, please try C20 instead.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@supertb1 said in Duet3D 1HCL - Closed Loop Controller Beta test:
M906 X1000 Y4000
I would set current lower for the stepper again, which has 4A rated current. To 50-85% of 4000.
-
@dc42 I changed the C value to 20 and the current down to 3 amps. performed a homing maneuver, it is still returning a G28 Y warning, it is more quiet, it did not go to 0 in absolute after being put back in closed loop and performing the M569.6 P51.0 V7 command.
Then performed a tuning maneuver : 51_2021-09-30_11.12.23Y axis.csv
and yes it was already set to C5 before the last set of tests -
@dc42
Are these the steppers that where used in the initial testing?
https://www.omc-stepperonline.com/closed-loop-stepper-motor/p-series-nema-17-closed-loop-stepper-motor-48ncm-67-99oz-in-with-encoder-1000cpr.html -
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
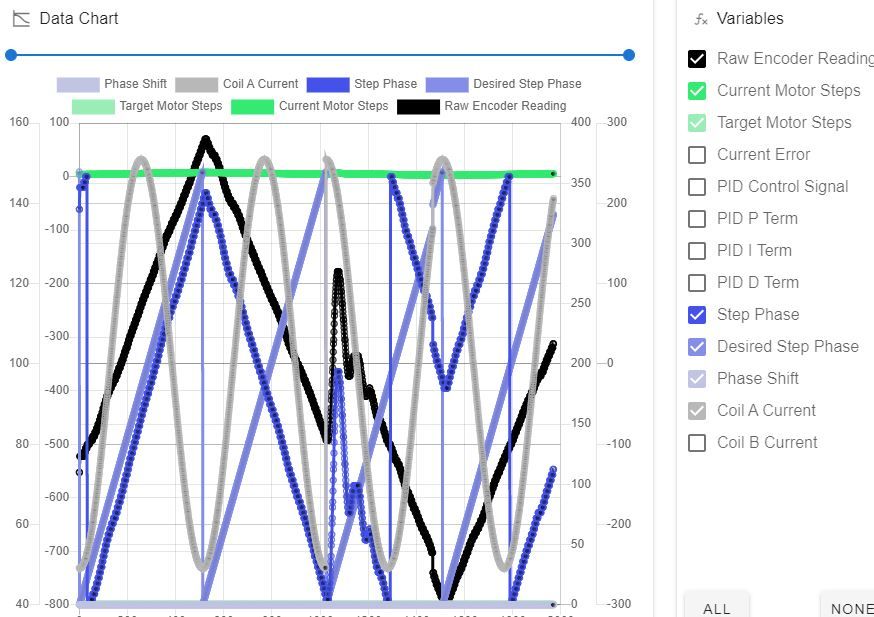
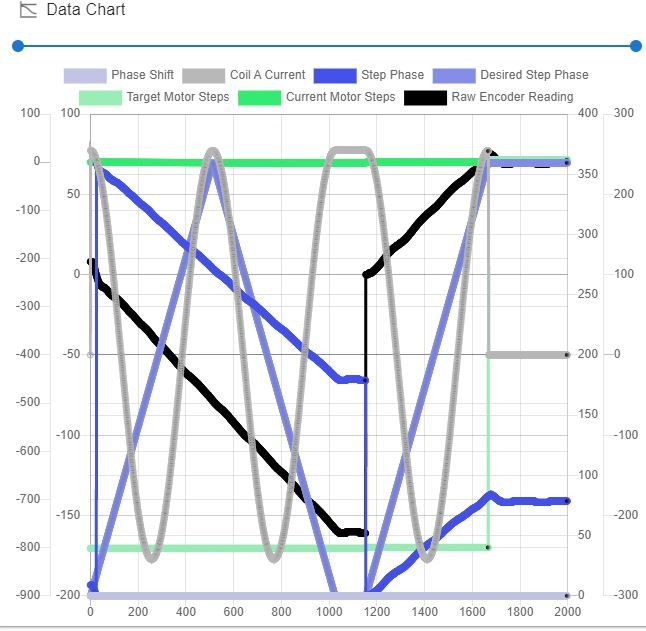
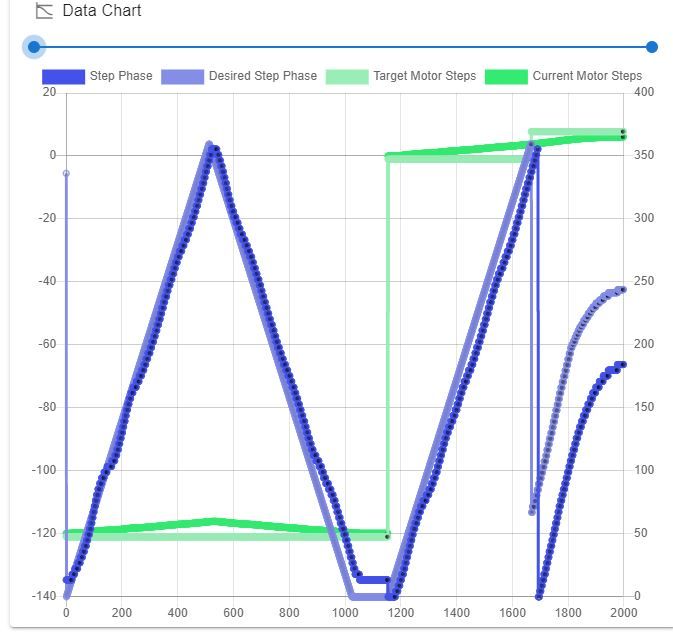
@dc42 well on the plus side the readings are not so jumbled up... looks like the step phase and raw encoder readings are 180 degrees out from the coil A current
-
@supertb1 Ah this is a much better graph - is this with
C20?
Something else has caught my eye in your M122 -TMC(notifyWait,15.5%,26)- I'm pretty sure the TMC task runs at ~50% in the latest firmware, and around 15% in some older firmware. Is the firmware you're using definitely the 'unoffical' closed-loop dropbox release linked further up (https://www.dropbox.com/sh/qkexrvhgsebbz0g/AAD9gfyS8UIU5Sau311WS1oLa?dl=0)?I think that because the 'unoffical' build has the same version number as the latest beta, any boards that were plugged in after you updated the firmware wouldn't update automatically - since it thinks it's already on the latest beta. @dc42 might be able to confirm if it works this way.
I assume the y-axis board is newly connected? if so, it might have fell into this trap.Either way, I think it would be a good idea to at least try updating again to make sure you're on the 'unoffical' dropbox build linked above.
Just to be 100% sure, here's how I would update:
- Download Duet3Firmware_EXP1HCL.bin from the link above
- Drag and drop that bin file into the upload button on the system files tab
- It should then ask if you want to install the firmware, and then go ahead and visibly install it - if it doesn't do this, this means there's a problem
Then after that's done, maybe try running M122 again, and see if that percentage on the TMC task has jumped from 15% to >40% - that would be a good sign that this was indeed the issue, and that it's now resolved.
If that's successful, you might want to set your C value back to 5, then please could you send another picture like that graph & we'll see if it's made any difference
-
@lirwin17 Yes this is with C20, I will double check the firmware using this link you have provided. This is some good troubleshooting here... it is going to make it very easy for the end users to identify and solve issues with these kinds of encoded steppers.
-
@lirwin17 I set the "C" value back to C5, performed home X and Y
M122 B50/51
9/30/2021, 12:30:25 PM M122 B51
Diagnostics for board 51:
Duet EXP1HCL firmware version 3.4.0beta3+1 (2021-09-14 15:07:31)
Bootloader ID: SAME5x bootloader version 2.4beta (2021-07-23)
Never used RAM 51304, free system stack 2571 words
Tasks: Move(notifyWait,0.0%,126) HEAT(notifyWait,0.0%,108) CanAsync(notifyWait,0.0%,70) CanRecv(notifyWait,0.0%,79) CanClock(notifyWait,0.0%,72) TMC(notifyWait,38.3%,344) CLSend(notifyWait,0.0%,148) CLData(notifyWait,0.0%,142) MAIN(running,59.6%,400) IDLE(ready,0.0%,39) AIN(notifyWait,2.0%,265), total 100.0%
Last reset 00:01:26 ago, cause: software
Last software reset at 2021-09-30 12:24, reason: HardFault bfarValid precise, available RAM 51580, slot 0
Software reset code 0x0060 HFSR 0x40000000 CFSR 0x00008200 ICSR 0x00430803 BFAR 0x20030008 SP 0x2001eba8 Task MAIN Freestk 531 ok
Stack: 00000000 00000000 00000001 20030000 00030f39 0001b8f9 0001ea4c 41000000 00000000 4072a200 e2080202 809d1f12 00884c02 45a0900e 81891780 0a003008 22000200 15220070 90840818 76001317 08124026 41200000 41c15176 41428ffe 20000010 0002699b 0000001a
Closed loop enabled: yes, live status: 0x4, encoder type rotaryQuadrature, pre-error threshold: 5.000000, error threshold: 10.000000, reverse polarity: yes, tuning: 0, tuning error: 0x1c, position 9, raw count = 0, collecting data: no, ultimateGain=0.000000, oscillationPeriod=0.000000, Control loop runtime (ms): min=0.000000, max=0.081333, avg=0.008000, Control loop frequency (Hz): min=6880.733887, max=18292.683594, avg=15625.000977
Driver 0: pos -122075, 257.0 steps/mm, standstill, reads 49188Moves scheduled 5, completed 5, in progress 0, hiccups 0, step errors 0, maxPrep 25, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0
Peak sync jitter -2/6, peak Rx sync delay 180, resyncs 0/0, no step interrupt scheduled
VIN: 24.2V, V12: 12.1V
MCU temperature: min 31.1C, current 31.3C, max 31.5C
Ticks since heat task active 23, ADC conversions started 85217, completed 85216, timed out 0, errs 0
Last sensors broadcast 0x00000000 found 0 28 ticks ago, loop time 0
CAN messages queued 745, send timeouts 0, received 810, lost 0, free buffers 37, min 37, error reg 0
dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 295, adv 37081/37189
9/30/2021, 12:30:13 PM M122 B50
Diagnostics for board 50:
Duet EXP1HCL firmware version 3.4.0beta3+1 (2021-09-14 15:07:31)
Bootloader ID: SAME5x bootloader version 2.4beta (2021-07-23)
Never used RAM 51304, free system stack 2575 words
Tasks: Move(notifyWait,0.0%,126) HEAT(notifyWait,0.0%,108) CanAsync(notifyWait,0.0%,70) CanRecv(notifyWait,0.0%,79) CanClock(notifyWait,0.0%,72) TMC(notifyWait,38.2%,344) CLSend(notifyWait,0.0%,148) CLData(notifyWait,0.0%,142) MAIN(running,59.8%,408) IDLE(ready,0.0%,39) AIN(notifyWait,2.0%,265), total 100.0%
Last reset 00:01:15 ago, cause: software
Last software reset time unknown, reason: HardFault bfarValid precise, available RAM 51580, slot 2
Software reset code 0x0060 HFSR 0x40000000 CFSR 0x00008200 ICSR 0x00430803 BFAR 0x20030008 SP 0x2001eba8 Task MAIN Freestk 531 ok
Stack: 00000000 00000000 00000002 20030000 00030f39 0001b8f9 0001ea4c 41000000 bf800000 00000000 533c0605 04001200 a8888700 06420000 c2010829 19a21029 50708239 5d000040 2a60041c 54540122 04801201 41200000 41c27924 4142a3fe 20000010 0002699b 00000002
Closed loop enabled: yes, live status: 0x4, encoder type rotaryQuadrature, pre-error threshold: 5.000000, error threshold: 10.000000, reverse polarity: no, tuning: 0, tuning error: 0x1c, position 1, raw count = 0, collecting data: no, ultimateGain=0.000000, oscillationPeriod=0.000000, Control loop runtime (ms): min=0.000000, max=0.069333, avg=0.006667, Control loop frequency (Hz): min=6756.756836, max=18292.683594, avg=15625.000977
Driver 0: pos -50588, 106.5 steps/mm, standstill, reads 50380, Moves scheduled 5, completed 5, in progress 0, hiccups 0, step errors 0, maxPrep 25, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0
Peak sync jitter -3/3, peak Rx sync delay 180, resyncs 0/0, no step interrupt scheduled
VIN: 24.3V, V12: 12.2V
MCU temperature: min 29.3C, current 29.5C, max 29.5C
Ticks since heat task active 63, ADC conversions started 73919, completed 73918, timed out 0, errs 0
Last sensors broadcast 0x00000000 found 0 67 ticks ago, loop time 0
CAN messages queued 653, send timeouts 0, received 707, lost 0, free buffers 37, min 37, error reg 0
dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 297, adv 37078/37193M569.1 P51.0 T2 C5 E5:10
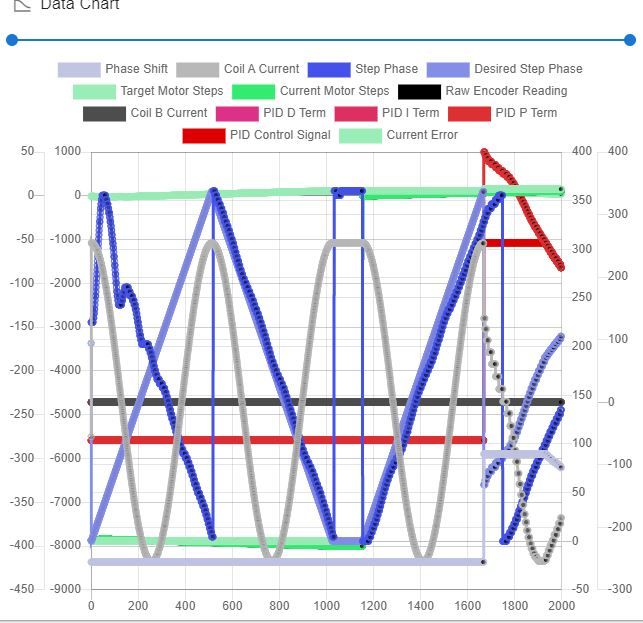
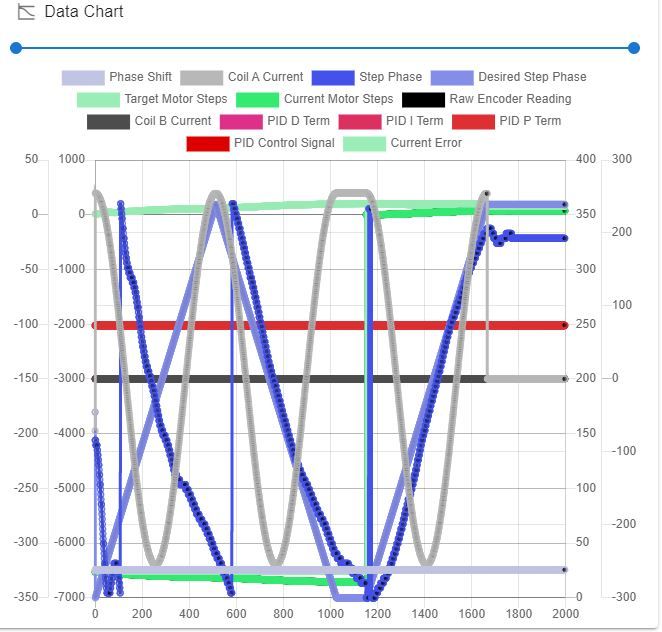
51_2021-09-30_12.32.37 C5Yaxis.csvM569.1 P51.0 T2 C20 E5:10
 51_2021-09-30_12.40.33 C20Yaxis.csv
51_2021-09-30_12.40.33 C20Yaxis.csv
so I think whatever changes this latest firmware has done has helped with the C5 value -
@supertb1 That's worked

So from those graphs it's definitely C5, so keep it at that

From your M122:tuning error: 0x1c, this is yet to be documented, but this happens when not all the required tuning moves are made. From the docs:manoeuvres 1, 2, 4, 8 and 16 are required
And 0x1c means 4, 8 & 16 haven't (yet) been run - so just try to home (assuming your homing file includes running those moves - which it should if you followed the tuning page - i.e. you should have an
M569.6 ... V31in your homing file somewhere)Let me know if your motor then holds position after completing homing
If that works, we can move onto the x axis. Perhaps try unplugging your y motor and encoder from board 51 and plugging your x motor and encoder into board 51. I would expect your x axis to then just work (albeit it will think it's Y). If it doesn't we'll need to investigate your motor
-
@lirwin17 so I did what you said and the problem follows from one card to the next with the X axis motor, on V31 maneuver it returns a G28 reverse polarity error. That said the Y axis is now holding position but it is not moving back to 0 in absolute following the suggested homing sequence:
; homey.g
; called to home the Y axis
;
; generated by RepRapFirmware Configuration Tool v3.2.3 on Mon Mar 08 2021 08:53:32 GMT-0600 (Central Standard Time)
M569 P51.0 D0 ; Turn off closed loopG91 ; relative positioning
G1 H2 Z5 F6000 ; lift Z relative to current position
G1 H1 Y-240 F3000 ; move quickly to X axis endstop and stop there (first pass)
G1 H2 Y5 F6000 ; go back a few mm
G1 H1 Y-240 F240 ; move slowly to X axis endstop once more (second pass)G90 ; absolute positioning
G1 Y25 F3000 ; Move to a known-safe position
M400 ; Wait for the move to complete
G4 P500 ; Wait for the motor to settle
M569 P51.0 D4 ; Turn closed loop back on
M569.6 P51.0 V31 ; Perform the tuning manoeuvres for a quadrature encoder
G1 Y0 ; Move back to Y0G1 H2 Z0 F6000 ; lower Z again
51_2021-09-30_17.48.08 C5 Y axis.csv
So i have a sneaking suspicion that the problem may lie in the extension joint made on the encoder wires that I am going to look into and get back to you on...How do I get the now closed loop Y axis to move back to the Y axis limit switch or within 10mm of it?
9/30/2021, 5:43:25 PM M122 B51
Diagnostics for board 51:
Duet EXP1HCL firmware version 3.4.0beta3+1 (2021-09-14 15:07:31)
Bootloader ID: SAME5x bootloader version 2.4beta (2021-07-23)
Never used RAM 51304, free system stack 2575 words
Tasks: Move(notifyWait,0.0%,126) HEAT(notifyWait,0.0%,108) CanAsync(notifyWait,0.0%,70) CanRecv(notifyWait,0.0%,79) CanClock(notifyWait,0.0%,72) TMC(notifyWait,40.1%,344) CLSend(notifyWait,0.0%,148) CLData(notifyWait,0.0%,142) MAIN(running,57.8%,380) IDLE(ready,0.0%,39) AIN(notifyWait,2.0%,265), total 100.0%
Last reset 00:02:00 ago, cause: software
Last software reset at 2021-09-30 12:24, reason: HardFault bfarValid precise, available RAM 51580, slot 0
Software reset code 0x0060 HFSR 0x40000000 CFSR 0x00008200 ICSR 0x00430803 BFAR 0x20030008 SP 0x2001eba8 Task MAIN Freestk 531 ok
Stack: 00000000 00000000 00000001 20030000 00030f39 0001b8f9 0001ea4c 41000000 00000000 4072a200 e2080202 809d1f12 00884c02 45a0900e 81891780 0a003008 22000200 15220070 90840818 76001317 08124026 41200000 41c15176 41428ffe 20000010 0002699b 0000001a
Closed loop enabled: yes, live status: 0, encoder type rotaryQuadrature, pre-error threshold: 5.000000, error threshold: 10.000000, reverse polarity: yes, tuning: 0, tuning error: 0, position -7870, raw count = 10302, collecting data: no, ultimateGain=0.000000, oscillationPeriod=0.000000, Control loop runtime (ms): min=0.005333, max=0.089333, avg=0.013333, Control loop frequency (Hz): min=6818.182129, max=16666.667969, avg=14423.078125
Driver 0: pos -122075, 257.0 steps/mm, standstill, reads 34Moves scheduled 5, completed 5, in progress 0, hiccups 0, step errors 0, maxPrep 22, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0
Peak sync jitter -2/4, peak Rx sync delay 180, resyncs 0/0, no step interrupt scheduled
VIN: 24.2V, V12: 12.1V
MCU temperature: min 30.2C, current 30.9C, max 30.9C
Ticks since heat task active 199, ADC conversions started 118514, completed 118513, timed out 0, errs 0
Last sensors broadcast 0x00000000 found 0 204 ticks ago, loop time 0
CAN messages queued 318, send timeouts 0, received 329, lost 0, free buffers 37, min 37, error reg 0
dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 297, adv 37079/37188 -
@lirwin17 I started looking into the possible issue with the splicing/ solder joint on my X axis encoder wires... I couldn't find any real issue there and I decided to to take a stab at it and switch the A+/B+ wires, low and behold it actually passed the V31 maneuver and holds position.... I couldn't believe it... the 1HCL board was trying to tell me the whole time what was wrong...lol. success... now all I need is for the homing sequence to actually return both axis to the near limit switch end of the travel and we will be good to go.
9/30/2021, 7:05:25 PM M122 B50
Diagnostics for board 50:
Duet EXP1HCL firmware version 3.4.0beta3+1 (2021-09-14 15:07:31)
Bootloader ID: SAME5x bootloader version 2.4beta (2021-07-23)
Never used RAM 51304, free system stack 2575 words
Tasks: Move(notifyWait,0.0%,126) HEAT(notifyWait,0.0%,95) CanAsync(notifyWait,0.0%,70) CanRecv(notifyWait,0.0%,79) CanClock(notifyWait,0.0%,72) TMC(notifyWait,43.1%,344) CLSend(notifyWait,0.0%,148) CLData(notifyWait,0.0%,142) MAIN(running,54.9%,418) IDLE(ready,0.0%,39) AIN(notifyWait,1.9%,265), total 100.0%
Last reset 00:17:36 ago, cause: power up
Last software reset time unknown, reason: HardFault bfarValid precise, available RAM 51580, slot 2
Software reset code 0x0060 HFSR 0x40000000 CFSR 0x00008200 ICSR 0x00430803 BFAR 0x20030008 SP 0x2001eba8 Task MAIN Freestk 531 ok
Stack: 00000000 00000000 00000002 20030000 00030f39 0001b8f9 0001ea4c 41000000 bf800000 00000000 533c0605 04001200 a8888700 06420000 c2010829 19a21029 50708239 5d000040 2a60041c 54540122 04801201 41200000 41c27924 4142a3fe 20000010 0002699b 00000002
Closed loop enabled: yes, live status: 0, encoder type rotaryQuadrature, pre-error threshold: 5.000000, error threshold: 10.000000, reverse polarity: yes, tuning: 0, tuning error: 0, position -6528, raw count = 58926, collecting data: no, ultimateGain=0.000000, oscillationPeriod=0.000000, Control loop runtime (ms): min=0.000000, max=0.096000, avg=0.013333, Control loop frequency (Hz): min=6465.517578, max=18292.683594, avg=14423.078125
Driver 0: pos -50588, 106.5 steps/mm, standstill, reads 567Moves scheduled 5, completed 5, in progress 0, hiccups 0, step errors 0, maxPrep 25, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0
Peak sync jitter -4/5, peak Rx sync delay 183, resyncs 0/0, no step interrupt scheduled
VIN: 24.3V, V12: 12.2V
MCU temperature: min 26.8C, current 28.4C, max 28.9C
Ticks since heat task active 19, ADC conversions started 1034352, completed 1034351, timed out 0, errs 0
Last sensors broadcast 0x00000000 found 0 23 ticks ago, loop time 0
CAN messages queued 8499, send timeouts 0, received 9537, lost 0, free buffers 37, min 37, error reg 0
dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 296, adv 37083/37183; homex.g
; called to home the X axis
;
; generated by RepRapFirmware Configuration Tool v3.2.3 on Mon Mar 08 2021 08:53:31 GMT-0600 (Central Standard Time)
M569 P50.0 D0 ; Turn off closed loopG91 ; relative positioning
G1 H2 Z5 F6000 ; lift Z relative to current position
G1 H1 X-240 F3000 ; move quickly to X axis endstop and stop there (first pass)
G1 H2 X5 F6000 ; go back a few mm
G1 H1 X-240 F240 ; move slowly to X axis endstop once more (second pass)G90 ; absolute positioning
G1 X50 F3000 ; Move to a known-safe position
M400 ; Wait for the move to complete
G4 P500 ; Wait for the motor to settle
M569 P50.0 D4 ; Turn closed loop back on
M569.6 P50.0 V31 ; Perform the tuning manoeuvres for a quadrature encoder
G1 X0 ; Move back to X0G1 H2 Z0 F6000 ; lower Z again
50_2021-09-30_19.06.20 C5 X axis.csvDrive Config:
G4 S1 ;wait for expansion boards to start
M569.1 P50.0 T2 C5 E5:10 ; Configure the 1HCL board at CAN address 50 with a quadrature encoder on the motor shaft that has 20 steps per motor full step.
M569.1 P51.0 T2 C5 E5:10 ; Configure the 1HCL board at CAN address 51 with a quadrature encoder on the motor shaft that has 20 steps per motor full step.
M569 P50.0 D4 S1 ; Configure the motor on the 1HCL at can address 50 as being in closed-loop drive mode (D4), Open loop (D2) and not reversed (S1) X axis
M569 P51.0 D4 S1 ; Configure the motor on the 1HCL at can address 51 as being in closed-loop drive mode (D4), Open loop (D2) and not reversed (S1) Y axis
M569 P0.0 S1 ; physical drive 0.0 goes forwards Z 1-2 axis
M569 P0.4 S1 ; physical drive 0.4 goes forwards Extruder
M584 X50.0 Y51.0 Z0.0:0.1 E0.4 ; set drive mapping
M671 X-122.25:689.20 Y0:0 S3.0 ; leadscrews at left (connected to Z0) and right (connected to Z1) of X axis
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X106.5 Y257 Z795.00 E339.00 ; set steps per mm
M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2)
M906 X1000 Y3000 Z3000 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
M917 X0 Y0 ; Set the closed loop axes to have a holding current of zero -
@lirwin17 today I descided to do some more maneuvers... IE home the axis, move the axis around on it's travel and I found something strange... the axis homes fine, completes the V31 maneuver and stops around the safe distance traveled. Then when I tell it to move in a positive direction the drive makes the stepper move in the opposite direction intended.... lol... one step forward... two steps back...lol.. and the next question what should a homeall.g look like
-
@lirwin17 Good afternoon Louis, today I decided to put it back in open loop and try a test print, after all the changes the first thing I wanted to do is a height map and a bed leveling... I put my microsteps back to 32... now that I got that part right.. "facepalm and long sigh" I put the B+ wires on the A+ terminal and the A+ terminals on the B+ terminal and did a homing maneuver on both axis with good results.. the axis is moving back to the home position and moving in the correct direction. Finally getting this going.
50_2021-10-04_10.11.00 X axis manuever.csv
51_2021-10-04_10.13.33 Y axis manuever.csv I'm going to mess with the home all to try and get everything working correctly... fingers crossed
So here is my Home all config currently:G91 ; relative positioning
G1 H2 Z5 F6000 ; lift Z relative to current position
G1 H1 X-605 Y-605 F1800 ; move quickly to X and Y axis endstops and stop there (first pass)
G1 H2 X5 Y5 F6000 ; go back a few mm
G1 H1 X-605 Y-605 F360 ; move slowly to X and Y axis endstops once more (second pass)
G90 ; absolute positioning
G1 X50 Y50 F3000 ; Move to a known-safe position
M400 ; Wait for the move to complete
G4 P500 ; Wait for the motor to settle
M569 P50.0 D4 ; Turn closed loop back on X axis
M569 P51.0 D4 ; Turn closed loop back on Y axis
M569.6 P50.0 V31 ; Perform the tuning manoeuvres for a quadrature encoder X axis
M569.6 D51.0 V31 ; Perform the tuning manoeuvres for a quadrature encoder Y axis
G1 X0 Y0 ; Move back to X0
G1 X10 Y10 F6000 ; go to first bed probe point and home Z
G30 ; home Z by probing the bed
This does not work.... it just sits there. any advice here woud be great... making great headway -
@dc42 I'm well into my first print in closed loop and all is well, I played with that tuning procedure a bit and after I had tried a few times to enter the PDand I variables according to the examples, the X axis it wouldn't perform the homing maneuver so I just put it back the way it was and I am happy with the amount of noise, accuracy, and temp of the motors during operations... so all in all a success. Looking forward to the next update, advice on homeall.g and any streamlining/improvements that have been made. let me know if there is any procedures you would like me to try.
-
@supertb1 we hope to release firmware 3.4beta5 shortly, which includes some improvements to the closed loop tuning mechanism. For details, see https://github.com/Duet3D/RepRapFirmware/wiki/Changelog-RRF-3.x-Beta-&-RC#reprapfirmware-340beta5.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 Just an update, I have beta 5 installed and am in to my 3rd three day print and there is no sign of any missed steps or shifting of any kind, my prints are holding a tight tolerance and I am very happy with the results... how long before I can buy another set of boards?