SAMMYC21 Configuring
-
My end goal is to leverage a single SAMMYC21 for x2 low current motor drivers and x2 analog inputs. These will be used to control two nozzle rotational axis and two pressure sensors on a pick and place head. This will replace the x2 Duet 1Tool boards I'm currently using for a more compact design.
Im currently trying to get the dual drivers working. So far Ive only modified the SAMMYC21.h
/* * SAMMYC21.h * * Created on: 23 May 2020 * Author: David */ #ifndef SRC_CONFIG_SAMMYC21_H_ #define SRC_CONFIG_SAMMYC21_H_ #include <Hardware/PinDescription.h> #define BOARD_TYPE_NAME "SAMMYC21" #define BOOTLOADER_NAME "SAMMYC21" // General features #define HAS_VREF_MONITOR 0 #define HAS_VOLTAGE_MONITOR 0 #define HAS_12V_MONITOR 0 #define HAS_CPU_TEMP_SENSOR 1 #define HAS_ADDRESS_SWITCHES 0 #define HAS_BUTTONS 1 #define USE_SERIAL_DEBUG 1 // Drivers configuration #define SUPPORT_DRIVERS 1 #define HAS_SMART_DRIVERS 0 #define HAS_STALL_DETECT 0 #define SINGLE_DRIVER 1 #define SUPPORT_SLOW_DRIVERS 1 #define SUPPORT_DELTA_MOVEMENT 0 #define DEDICATED_STEP_TIMER 1 #define SUPPORT_TMC51xx 0 #define SUPPORT_TMC2160 0 #define SUPPORT_TMC2660 0 #define SUPPORT_TMC22xx 0 constexpr size_t NumDrivers = 2; // #define USE_CCL 0 // USE_CCL also requires DIFFERENTIAL_STEPPER_OUTPUTS // #if USE_CCL // PortGroup * const StepPio = &(PORT->Group[1]); // the PIO that all the step pins are on // constexpr Pin EnablePins[NumDrivers] = { PortAPin(9) }; // constexpr Pin StepPins[NumDrivers] = { PortBPin(10) }; // constexpr Pin InvertedStepPins[NumDrivers] = { PortAPin(11) }; // constexpr Pin DirectionPins[NumDrivers] = { PortAPin(10) }; // // The SAMC21 can sink more current than it can source, therefore we use active low signals to drive external drivers // #define ACTIVE_HIGH_STEP 1 // 1 = active high, 0 = active low // #define ACTIVE_HIGH_DIR 0 // 1 = active high, 0 = active low // #define ACTIVE_HIGH_ENABLE 0 // 1 = active high, 0 = active low // #else PortGroup * const StepPio = &(PORT->Group[0]); // the PIO that all the step pins are on constexpr Pin EnablePins[NumDrivers] = { PortAPin(9), PortAPin(8) }; constexpr Pin StepPins[NumDrivers] = { PortAPin(11),PortAPin(6) }; constexpr Pin DirectionPins[NumDrivers] = { PortAPin(10), PortAPin(7) }; // PortGroup * const StepPio = &(PORT->Group[0]); // the PIO that all the step pins are on // constexpr Pin StepPins[NumDrivers] = { PortAPin(9), PortAPin(6) }; // constexpr Pin DirectionPins[NumDrivers] = { PortAPin(11), PortAPin(8) }; // constexpr Pin DriverDiagPins[NumDrivers] = { PortAPin(10), PortAPin(7) }; // The SAMC21 can sink more current than it can source, therefore we use active low signals to drive external drivers #define ACTIVE_HIGH_STEP 0 // 1 = active high, 0 = active low #define ACTIVE_HIGH_DIR 0 // 1 = active high, 0 = active low #define ACTIVE_HIGH_ENABLE 0 // 1 = active high, 0 = active low // #endif #define SUPPORT_THERMISTORS 1 #define SUPPORT_SPI_SENSORS 1 #define SUPPORT_I2C_SENSORS 1 #define SUPPORT_LIS3DH 1 #define SUPPORT_LDC1612 1 #define SUPPORT_DHT_SENSOR 0 #define SUPPORT_SDADC 0 #define USE_MPU 0 #define USE_CACHE 0 #define DIAG_SERCOM_NUMBER 5 // which SERCOM device we use for debugging output constexpr bool UseAlternateCanPins = true; constexpr size_t MaxPortsPerHeater = 1; constexpr size_t NumThermistorInputs = 2; constexpr float DefaultThermistorSeriesR = 2200.0; constexpr Pin TempSensePins[NumThermistorInputs] = { PortAPin(2), PortAPin(3) }; constexpr Pin CanStandbyPin = PortAPin(27); constexpr Pin ButtonPins[] = { PortBPin(9) }; // Diagnostic LEDs constexpr Pin LedPins[] = { PortAPin(28) }; constexpr bool LedActiveHigh = true; #if SUPPORT_SPI_SENSORS // Shared SPI using pins PA16,17,18. If changing this, also change the available pins in the pin table. constexpr uint8_t SspiSercomNumber = 1; constexpr uint32_t SspiDataInPad = 2; constexpr Pin SSPIMosiPin = PortAPin(16); constexpr GpioPinFunction SSPIMosiPinPeriphMode = GpioPinFunction::C; constexpr Pin SSPISclkPin = PortAPin(17); constexpr GpioPinFunction SSPISclkPinPeriphMode = GpioPinFunction::C; constexpr Pin SSPIMisoPin = PortAPin(18); constexpr GpioPinFunction SSPIMisoPinPeriphMode = GpioPinFunction::C; #endif #if SUPPORT_I2C_SENSORS // I2C using pins PA22,23. If changing this, also change the available pins in the pin table. constexpr uint8_t I2CSercomNumber = 3; constexpr Pin I2CSDAPin = PortAPin(22); constexpr GpioPinFunction I2CSDAPinPeriphMode = GpioPinFunction::C; constexpr Pin I2CSCLPin = PortAPin(23); constexpr GpioPinFunction I2CSCLPinPeriphMode = GpioPinFunction::C; #define I2C_HANDLER SERCOM3_Handler #endif #if SUPPORT_LIS3DH # define ACCELEROMETER_USES_SPI (0) // 0 if the accelerometer is connected via I2C, 1 if via SPI constexpr Pin Lis3dhInt1Pin = PortAPin(13); #endif #if SUPPORT_LDC1612 constexpr uint16_t LDC1612_I2CAddress = 0x2B; // pin 4 is tied high on the Grove board constexpr Pin LDC1612InterruptPin = PortAPin(21); #endif // Table of pin functions that we are allowed to use constexpr PinDescription PinTable[] = { // TC TCC ADC SDADC SERCOM in SERCOM out Exint PinName // Port A { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA00 not on board { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA01 not on board { TcOutput::none, TccOutput::none, AdcInput::adc0_0, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "temp0" }, // PA02 thermistor { TcOutput::none, TccOutput::none, AdcInput::adc0_1, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "temp1" }, // PA03 thermistor { TcOutput::none, TccOutput::tcc0_0E, AdcInput::adc0_4, AdcInput::none, SercomIo::none, SercomIo::none, 4, "pa04" }, // PA04 { TcOutput::none, TccOutput::none, AdcInput::adc0_5, AdcInput::none, SercomIo::none, SercomIo::none, 5, "pa05" }, // PA05 { TcOutput::none, TccOutput::tcc1_0E, AdcInput::adc0_6, AdcInput::none, SercomIo::none, SercomIo::none, 6, nullptr }, // PA06 driver STEP // PA06 { TcOutput::none, TccOutput::none, AdcInput::adc0_7, AdcInput::none, SercomIo::none, SercomIo::none, 7, nullptr }, // PA07 driver DIR// PA07 { TcOutput::none, TccOutput::none, AdcInput::adc0_8, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA08 driver EN // PA08 { TcOutput::none, TccOutput::none, AdcInput::adc0_9, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA09 driver EN { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA10 driver DIR { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA11 driver STEP { TcOutput::none, TccOutput::tcc2_0E, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, 12, "pa12" }, // PA12 #if SUPPORT_LIS3DH { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, 13, nullptr }, // PA13 accelerometer INT1 #else { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, 13, "pa13" }, // PA13 #endif { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA14 crystal { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA15 crystal #if SUPPORT_SPI_SENSORS { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::sercom1c, Nx, nullptr }, // PA16 SPI { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::sercom1c, SercomIo::none, Nx, nullptr }, // PA17 SPI { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA18 SPI #else { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::sercom1c, 0, "pa16" }, // PA16 { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::sercom1c, SercomIo::none, 1, "pa17" }, // PA17 { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, 2, "pa18" }, // PA18 #endif { TcOutput::tc4_1, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, 3, "pa19" }, // PA19 { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "pa20" }, // PA20 { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "pa21" }, // PA21 LDC1612 INT #if SUPPORT_I2C_SENSORS { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA22 I2C { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA23 I2C #else { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "pa22" }, // PA22 (has TC0.0 on that pin but can't control the frequency well) { TcOutput::tc0_1, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "pa23" }, // PA23 #endif { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "pa24" }, // PA24 { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "pa25" }, // PA25 { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA26 not on chip { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA27 CAN transceiver standby { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA28 LED 0 { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA29 not on chip { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA30 swclk { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA31 swdio // Port B { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB00 not on chip { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB01 not on chip { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB02 USB interface (SERCOM5 pad 0) { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB03 USB interface (SERCOM5 pad 1) { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB04 not on chip { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB05 not on chip { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB06 not on chip { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB07 not on chip { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, 8, "pb08" }, // PB08 { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, 9, "!^button0" }, // PB09 button recognised by bootloader // PB22/23 are used for CAN0, PB10/11 for CAN1 // Virtual pins #if SUPPORT_LIS3DH { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "i2c.lis3dh" }, // LIS3DH sensor connected via I2C #endif #if SUPPORT_LDC1612 { TcOutput::none, TccOutput::none, AdcInput::ldc1612, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "i2c.ldc1612" }, // LDC1612 sensor connected via I2C #endif }; constexpr size_t NumPins = ARRAY_SIZE(PinTable); constexpr size_t NumRealPins = 32 + 10; // 32 pins on port A (some missing), only PB08 and PB09 are brought out on this board constexpr size_t NumVirtualPins = SUPPORT_LIS3DH + SUPPORT_LDC1612; static_assert(NumPins == NumRealPins + NumVirtualPins); // Timer/counter used to generate step pulses and other sub-millisecond timings TcCount32 * const StepTc = &(TC2->COUNT32); constexpr IRQn StepTcIRQn = TC2_IRQn; constexpr unsigned int StepTcClockId = TC2_GCLK_ID; constexpr unsigned int StepTcNumber = 2; #define STEP_TC_HANDLER TC2_Handler // Available UART ports #define NUM_SERIAL_PORTS 1 constexpr IRQn Serial0_IRQn = SERCOM5_IRQn; // DMA channel assignments constexpr DmaChannel DmacChanTmcTx = 0; constexpr DmaChannel DmacChanTmcRx = 1; constexpr DmaChannel DmacChanAdc0Rx = 2; constexpr unsigned int NumDmaChannelsUsed = 4; // must be at least the number of channels used, may be larger. Max 12 on the SAMC21. // DMA priorities, higher is better. 0 to 3 are available. constexpr DmaPriority DmacPrioTmcTx = 0; constexpr DmaPriority DmacPrioTmcRx = 3; constexpr DmaPriority DmacPrioAdcRx = 2; // Interrupt priorities, lower means higher priority. 0 can't make RTOS calls. Only 0 to 3 are available. const NvicPriority NvicPriorityStep = 1; // step interrupt is next highest, it can preempt most other interrupts const NvicPriority NvicPriorityUart = 2; // serial driver makes RTOS calls const NvicPriority NvicPriorityPins = 2; // priority for GPIO pin interrupts const NvicPriority NvicPriorityI2C = 2; const NvicPriority NvicPriorityCan = 3; const NvicPriority NvicPriorityDmac = 3; // priority for DMA complete interrupts #endif /* SRC_CONFIG_SAMMYC21_H_ */Having done that and nothing else, DWC shows x2 drivers for the SAMMYC21
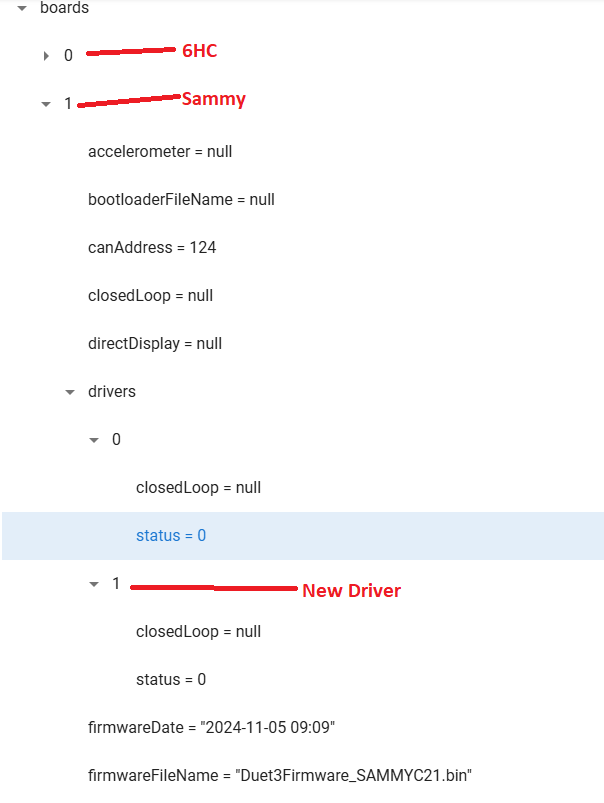
That all seems good, but when I attempt to actually drive the new 1 Drive there is not step activity. The 0 Drive pulses the step as expected.
Is there any other modifications to make to the SAMMYC21. h file or any other file in the project?
Thanks for any input
-
@wayneosdias what type of stepper driver have you connected to the SammyC21?
You will need to change the definition of SINGLE_DRIVER from 1 to 0 at the very least.
-
@dc42
I haven't connected any drivers yet, just probing via logic analyzer on the bench. The first HW pass will be using the Mini2+. Changing the SINGLE_DRIVER to 0 has got me the step pulses I'm after. Both Drives step io pulsing.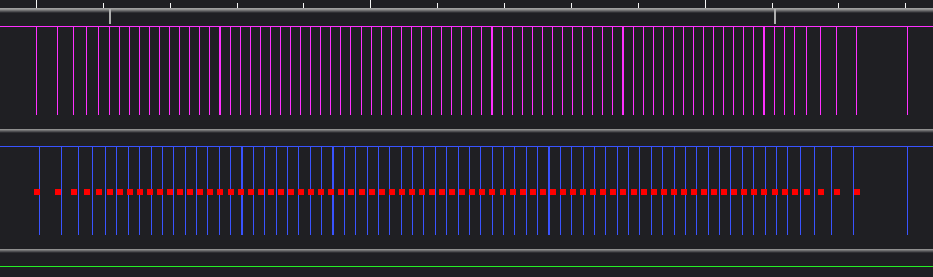
Problem now is I had to disable TMC22xx support to actually compile. I assume I lose the ability to set the Mini2+ TMC2209 motor parameters, most importantly the current setting?
Heres just a couple of the 100's of errors I had with #define SUPPORT_TMC22xx 1
31 | #if TMC22xx_VARIABLE_NUM_DRIVERS | ^~~~~~~~~~~~~~~~~~~~~~~~~~~~ In file included from ../src/Movement/StepperDrivers/TMC22xx.cpp:8: ../src/Movement/StepperDrivers/TMC22xx.h:31:5: warning: "TMC22xx_VARIABLE_NUM_DRIVERS" is not defined, evaluates to 0 [-Wundef] 31 | #if TMC22xx_VARIABLE_NUM_DRIVERS | ^~~~~~~~~~~~~~~~~~~~~~~~~~~~ ../src/Movement/StepperDrivers/TMC22xx.cpp:13:3: error: #error TMC22xx_HAS_ENABLE_PINS not defined 13 | # error TMC22xx_HAS_ENABLE_PINS not defined | ^~~~~ ../src/Movement/StepperDrivers/TMC22xx.cpp:17:3: error: #error TMC22xx_SINGLE_DRIVER not defined 17 | # error TMC22xx_SINGLE_DRIVER not defined | ^~~~~ ../src/Movement/StepperDrivers/TMC22xx.cpp:21:3: error: #error TMC22xx_HAS_MUX not defined 21 | # error TMC22xx_HAS_MUX not defined | ^~~~~ ../src/Movement/StepperDrivers/TMC22xx.cpp:25:3: error: #error TMC22xx_VARIABLE_NUM_DRIVERS not defined 25 | # error TMC22xx_VARIABLE_NUM_DRIVERS not defined | ^~~~~ ../src/Movement/StepperDrivers/TMC22xx.cpp:29:3: error: #error TMC22xx_USE_SLAVEADDR not defined 29 | # error TMC22xx_USE_SLAVEADDR not defined | ^~~~~Heres the latest SAMMYC21.h
/* * SAMMYC21.h * * Created on: 23 May 2020 * Author: David */ #ifndef SRC_CONFIG_SAMMYC21_H_ #define SRC_CONFIG_SAMMYC21_H_ #include <Hardware/PinDescription.h> #define BOARD_TYPE_NAME "SAMMYC21" #define BOOTLOADER_NAME "SAMMYC21" // General features #define HAS_VREF_MONITOR 0 #define HAS_VOLTAGE_MONITOR 0 #define HAS_12V_MONITOR 0 #define HAS_CPU_TEMP_SENSOR 1 #define HAS_ADDRESS_SWITCHES 0 #define HAS_BUTTONS 1 #define USE_SERIAL_DEBUG 1 // Drivers configuration #define SUPPORT_DRIVERS 1 #define HAS_SMART_DRIVERS 0 #define HAS_STALL_DETECT 0 #define SINGLE_DRIVER 0 #define SUPPORT_SLOW_DRIVERS 0 #define SUPPORT_DELTA_MOVEMENT 0 #define DEDICATED_STEP_TIMER 1 #define SUPPORT_TMC51xx 0 #define SUPPORT_TMC2160 0 #define SUPPORT_TMC2660 0 #define SUPPORT_TMC22xx 0 constexpr size_t NumDrivers = 2; // #define USE_CCL 0 // USE_CCL also requires DIFFERENTIAL_STEPPER_OUTPUTS // #if USE_CCL // PortGroup * const StepPio = &(PORT->Group[1]); // the PIO that all the step pins are on // constexpr Pin EnablePins[NumDrivers] = { PortAPin(9) }; // constexpr Pin StepPins[NumDrivers] = { PortBPin(10) }; // constexpr Pin InvertedStepPins[NumDrivers] = { PortAPin(11) }; // constexpr Pin DirectionPins[NumDrivers] = { PortAPin(10) }; // // The SAMC21 can sink more current than it can source, therefore we use active low signals to drive external drivers // #define ACTIVE_HIGH_STEP 1 // 1 = active high, 0 = active low // #define ACTIVE_HIGH_DIR 0 // 1 = active high, 0 = active low // #define ACTIVE_HIGH_ENABLE 0 // 1 = active high, 0 = active low // #else PortGroup * const StepPio = &(PORT->Group[0]); // the PIO that all the step pins are on constexpr Pin EnablePins[NumDrivers] = { PortAPin(9), PortAPin(8) }; constexpr Pin StepPins[NumDrivers] = { PortAPin(11),PortAPin(6) }; constexpr Pin DirectionPins[NumDrivers] = { PortAPin(10), PortAPin(7) }; // PortGroup * const StepPio = &(PORT->Group[0]); // the PIO that all the step pins are on // constexpr Pin StepPins[NumDrivers] = { PortAPin(9), PortAPin(6) }; // constexpr Pin DirectionPins[NumDrivers] = { PortAPin(11), PortAPin(8) }; // constexpr Pin DriverDiagPins[NumDrivers] = { PortAPin(10), PortAPin(7) }; // The SAMC21 can sink more current than it can source, therefore we use active low signals to drive external drivers #define ACTIVE_HIGH_STEP 0 // 1 = active high, 0 = active low #define ACTIVE_HIGH_DIR 0 // 1 = active high, 0 = active low #define ACTIVE_HIGH_ENABLE 0 // 1 = active high, 0 = active low // #endif #define SUPPORT_THERMISTORS 1 #define SUPPORT_SPI_SENSORS 1 #define SUPPORT_I2C_SENSORS 1 #define SUPPORT_LIS3DH 1 #define SUPPORT_LDC1612 1 #define SUPPORT_DHT_SENSOR 0 #define SUPPORT_SDADC 0 #define USE_MPU 0 #define USE_CACHE 0 #define DIAG_SERCOM_NUMBER 5 // which SERCOM device we use for debugging output constexpr bool UseAlternateCanPins = true; constexpr size_t MaxPortsPerHeater = 1; constexpr size_t NumThermistorInputs = 2; constexpr float DefaultThermistorSeriesR = 2200.0; constexpr Pin TempSensePins[NumThermistorInputs] = { PortAPin(2), PortAPin(3) }; constexpr Pin CanStandbyPin = PortAPin(27); constexpr Pin ButtonPins[] = { PortBPin(9) }; // Diagnostic LEDs constexpr Pin LedPins[] = { PortAPin(28) }; constexpr bool LedActiveHigh = true; #if SUPPORT_SPI_SENSORS // Shared SPI using pins PA16,17,18. If changing this, also change the available pins in the pin table. constexpr uint8_t SspiSercomNumber = 1; constexpr uint32_t SspiDataInPad = 2; constexpr Pin SSPIMosiPin = PortAPin(16); constexpr GpioPinFunction SSPIMosiPinPeriphMode = GpioPinFunction::C; constexpr Pin SSPISclkPin = PortAPin(17); constexpr GpioPinFunction SSPISclkPinPeriphMode = GpioPinFunction::C; constexpr Pin SSPIMisoPin = PortAPin(18); constexpr GpioPinFunction SSPIMisoPinPeriphMode = GpioPinFunction::C; #endif #if SUPPORT_I2C_SENSORS // I2C using pins PA22,23. If changing this, also change the available pins in the pin table. constexpr uint8_t I2CSercomNumber = 3; constexpr Pin I2CSDAPin = PortAPin(22); constexpr GpioPinFunction I2CSDAPinPeriphMode = GpioPinFunction::C; constexpr Pin I2CSCLPin = PortAPin(23); constexpr GpioPinFunction I2CSCLPinPeriphMode = GpioPinFunction::C; #define I2C_HANDLER SERCOM3_Handler #endif #if SUPPORT_LIS3DH # define ACCELEROMETER_USES_SPI (0) // 0 if the accelerometer is connected via I2C, 1 if via SPI constexpr Pin Lis3dhInt1Pin = PortAPin(13); #endif #if SUPPORT_LDC1612 constexpr uint16_t LDC1612_I2CAddress = 0x2B; // pin 4 is tied high on the Grove board constexpr Pin LDC1612InterruptPin = PortAPin(21); #endif // Table of pin functions that we are allowed to use constexpr PinDescription PinTable[] = { // TC TCC ADC SDADC SERCOM in SERCOM out Exint PinName // Port A { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA00 not on board { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA01 not on board { TcOutput::none, TccOutput::none, AdcInput::adc0_0, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "temp0" }, // PA02 thermistor { TcOutput::none, TccOutput::none, AdcInput::adc0_1, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "temp1" }, // PA03 thermistor { TcOutput::none, TccOutput::tcc0_0E, AdcInput::adc0_4, AdcInput::none, SercomIo::none, SercomIo::none, 4, "pa04" }, // PA04 { TcOutput::none, TccOutput::none, AdcInput::adc0_5, AdcInput::none, SercomIo::none, SercomIo::none, 5, "pa05" }, // PA05 { TcOutput::none, TccOutput::tcc1_0E, AdcInput::adc0_6, AdcInput::none, SercomIo::none, SercomIo::none, 6, nullptr }, // PA06 driver STEP // PA06 { TcOutput::none, TccOutput::none, AdcInput::adc0_7, AdcInput::none, SercomIo::none, SercomIo::none, 7, nullptr }, // PA07 driver DIR// PA07 { TcOutput::none, TccOutput::none, AdcInput::adc0_8, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA08 driver EN // PA08 { TcOutput::none, TccOutput::none, AdcInput::adc0_9, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA09 driver EN { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA10 driver DIR { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA11 driver STEP { TcOutput::none, TccOutput::tcc2_0E, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, 12, "pa12" }, // PA12 #if SUPPORT_LIS3DH { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, 13, nullptr }, // PA13 accelerometer INT1 #else { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, 13, "pa13" }, // PA13 #endif { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA14 crystal { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA15 crystal #if SUPPORT_SPI_SENSORS { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::sercom1c, Nx, nullptr }, // PA16 SPI { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::sercom1c, SercomIo::none, Nx, nullptr }, // PA17 SPI { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA18 SPI #else { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::sercom1c, 0, "pa16" }, // PA16 { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::sercom1c, SercomIo::none, 1, "pa17" }, // PA17 { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, 2, "pa18" }, // PA18 #endif { TcOutput::tc4_1, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, 3, "pa19" }, // PA19 { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "pa20" }, // PA20 { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "pa21" }, // PA21 LDC1612 INT #if SUPPORT_I2C_SENSORS { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA22 I2C { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA23 I2C #else { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "pa22" }, // PA22 (has TC0.0 on that pin but can't control the frequency well) { TcOutput::tc0_1, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "pa23" }, // PA23 #endif { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "pa24" }, // PA24 { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "pa25" }, // PA25 { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA26 not on chip { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA27 CAN transceiver standby { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA28 LED 0 { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA29 not on chip { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA30 swclk { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PA31 swdio // Port B { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB00 not on chip { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB01 not on chip { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB02 USB interface (SERCOM5 pad 0) { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB03 USB interface (SERCOM5 pad 1) { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB04 not on chip { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB05 not on chip { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB06 not on chip { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, nullptr }, // PB07 not on chip { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, 8, "pb08" }, // PB08 { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, 9, "!^button0" }, // PB09 button recognised by bootloader // PB22/23 are used for CAN0, PB10/11 for CAN1 // Virtual pins #if SUPPORT_LIS3DH { TcOutput::none, TccOutput::none, AdcInput::none, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "i2c.lis3dh" }, // LIS3DH sensor connected via I2C #endif #if SUPPORT_LDC1612 { TcOutput::none, TccOutput::none, AdcInput::ldc1612, AdcInput::none, SercomIo::none, SercomIo::none, Nx, "i2c.ldc1612" }, // LDC1612 sensor connected via I2C #endif }; constexpr size_t NumPins = ARRAY_SIZE(PinTable); constexpr size_t NumRealPins = 32 + 10; // 32 pins on port A (some missing), only PB08 and PB09 are brought out on this board constexpr size_t NumVirtualPins = SUPPORT_LIS3DH + SUPPORT_LDC1612; static_assert(NumPins == NumRealPins + NumVirtualPins); // Timer/counter used to generate step pulses and other sub-millisecond timings TcCount32 * const StepTc = &(TC2->COUNT32); constexpr IRQn StepTcIRQn = TC2_IRQn; constexpr unsigned int StepTcClockId = TC2_GCLK_ID; constexpr unsigned int StepTcNumber = 2; #define STEP_TC_HANDLER TC2_Handler // Available UART ports #define NUM_SERIAL_PORTS 1 constexpr IRQn Serial0_IRQn = SERCOM5_IRQn; // DMA channel assignments constexpr DmaChannel DmacChanTmcTx = 0; constexpr DmaChannel DmacChanTmcRx = 1; constexpr DmaChannel DmacChanAdc0Rx = 2; constexpr unsigned int NumDmaChannelsUsed = 4; // must be at least the number of channels used, may be larger. Max 12 on the SAMC21. // DMA priorities, higher is better. 0 to 3 are available. constexpr DmaPriority DmacPrioTmcTx = 0; constexpr DmaPriority DmacPrioTmcRx = 3; constexpr DmaPriority DmacPrioAdcRx = 2; // Interrupt priorities, lower means higher priority. 0 can't make RTOS calls. Only 0 to 3 are available. const NvicPriority NvicPriorityStep = 1; // step interrupt is next highest, it can preempt most other interrupts const NvicPriority NvicPriorityUart = 2; // serial driver makes RTOS calls const NvicPriority NvicPriorityPins = 2; // priority for GPIO pin interrupts const NvicPriority NvicPriorityI2C = 2; const NvicPriority NvicPriorityCan = 3; const NvicPriority NvicPriorityDmac = 3; // priority for DMA complete interrupts #endif /* SRC_CONFIG_SAMMYC21_H_ */Can you help me get the TMC2209_support back?
Thanks for help guys
")
-
@wayneosdias try adding these lines to Config/SAMMYC21.h:
#define VARIABLE_NUM_DRIVERS 0 #define TMC22xx_HAS_MUX 0 #define TMC22xx_USE_SLAVEADDR 1