Connection of Servo with DuetMainboard 6HC
-
We are required to connect a servo motor with the following specs,
50 W to 22 kW,
Input power supply for Driver: Voltage DC 24 V/48 V・AC 100 V/200 V/400 V,
23 bit Absolute/Incremental・battery-less Absolute/Incremental encoder,
Frequency response 3.2 kHzHow do I connect this servo with my duet board(Duet MainBoard 6HC)? How to configure this in the RepRap Firmware?
-
Does your servo have it's own driver that accepts a step/dir signal?
https://docs.duet3d.com/en/User_manual/Connecting_hardware/Motors_connecting_external
-
This post is deleted! -
@Phaedrux
Yes, the driver has step/dir signal.
We need to connect the following driver with the duet mainboard 6HC. How should I connect the driver with the mainboard? After going through some documentation, GPIO can be used to generate PWM signals. If so, how do I generate PWM signals in the GPIO pin?
@T3P3Tony @dc42 -
 undefined Phaedrux marked this topic as a question
undefined Phaedrux marked this topic as a question
-
@AndrewStaines I'm afraid the 6HC is not designed for this application, and does not have provisions to drive step/dir outputs from the mainboard; with the 6HC this is only supported via an expansion board such as the 1XD.
As far as mainboards, the 6XD board is better suited to driving servos such as yours, and the setup for it would be reasonably straightforward, based on your diagram above. There would still be some things you need to account for, ones that immediately jump out being the 6XD's (or 1XD's) 5V step/dir outputs and your drive's 3.3V input, as well as needing to sink a 24v signal via enable pins (which they cannot directly).
Here is a Github repository for a breakout board I made to go between the 6XD and a pair of Yaskawa servos, which have drives very similar in overall setup to yours. Your drives will probably require some slight differences in spots, but this might get you started, especially the schematic.
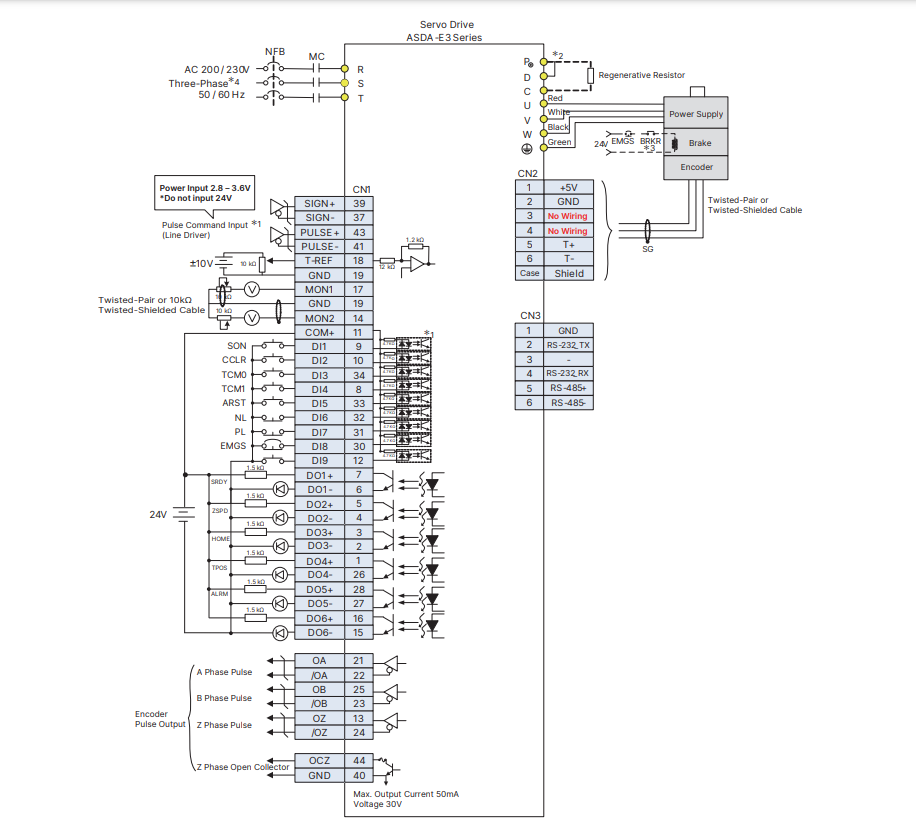
I can't be confident without a close look at your drivers' manual, but based just on the schematic you provided, your bare minimum connections for functionality will be your CN1 pins 39, 37, 43, 41, 11, and 9, which will give you enable (I assume "SON" is "servo on") and step (Pulse) and direction (Sign). All of these have equivalents on my breakout board, with the same issues to be solved, though you need more information on your sign/pulse circuits to determine the proper resistor to bring you to 3.3V.
-
Wondering how your progress is going. I'm picking up a 6 axis robot and hoping to use a duet board for main the control. Any advise would be appreciated.