Hollow shaft extruder
-
@o_lampe said in Hollow shaft extruder:
@tombrazier said in Hollow shaft extruder:
At 700mA I can drive the filament at 50mm/s and accelerate at 1500mm/s^2 without a motor stall
Is that the retraction speed or can you actually extrude at 50mm/s? What are actual PLA print speeds with 0.4mm nozzle and say 0.3mm layer?
It's always hard to compare apples with oranges, but in the end I'd like to know if it's worth going the extra mile with the dual motor setup I'm working on.Tom, although I've been using my "original" NEMA 14 VDE for well over two years, I still tinker with ideas. I never could get a NEMA 11 pancake to drive reliably, but TWO of them, rotating in the same direction but mounted back-to-back, seems like the cat's meow. Because they are back-to-back, they eliminate torque on the filament. Of course, you need two motors, and two bearing carriers. But one carrier is "right hand thread", and the other is, of necessity, "left hand thread", so the grooves scored in the filament only cross each other once per revolution. There is no issue with getting the two grooves to track each other, because they can't, and don't need to. They are independent of each other. There is still only one knife edge per carrier, per my reasoning above.
Of course this bumps the complexity and cost by 2x, and the weight up to 65 whole grams! Prototype with 30 degree cant angles.

EDIT Nov.1, 2023: A very brief video of the Push-Me_Pull_You VDE running (change the .doc extension to .mov).
Cons: as noted, twice as heavy and twice as complicated, needs left AND right hand drive carriers.
Pros: handles extremely flexible TPU with no hot end anchoring at all, 5 times the filament force (5 kilos vs 1 kilo) at 0.2 amps (paralleled NEMA 11 motors, no heat issues at all), motors can attain 4500 RPM, and 3000 RPM while actually driving filament (150 mm/sec at 30 degree cant angle). Feed and retraction very repeatable, as the two drivers don't interact.
The Take Away: Not worth the size, weight (80 grams), and expense, unless you are after extreme extrusion speeds. I'll stick to my tried-and-true single knife NEMA 14. -
@rqthree The left/right rotation is a good idea.
Otherwise It is a bit similar to my dual motor approach, but I'll put a Bowden tube between the two. No weight panelty and free choice for the remote motor.I'm also a bit worried about temperatures and sketched up a thin watercooling plate to fit between your motors. A bit more weight doesn't make much of a difference, you already fouled there anyway
")
-
@rqthree very cute extruder!
Do you have some more informations about the motors and all vitamins used? Would you share your 3D models?
Thanks,
Frédéric
-
@o_lampe said in Hollow shaft extruder:
Is that the retraction speed or can you actually extrude at 50mm/s? What are actual PLA print speeds with 0.4mm nozzle and say 0.3mm layer?
That's retraction speed. I think the motor can move at that speed while printing without stalling (but will have to confirm for sure). However with compression of the helical thread actual extrusion speed will be a whole lot lower. I specced the motor for extruding about 16mm/s which would give about 320mm/s linear printing speed with 0.4mm x 0.3mm lines. However with nozzle back-pressure I don't expect to get 16mm/s.
-
I've verified my NEMA08 motor temp-curve and the rated current of 0.6A is quite reasonable. For PLA printing the motor-surface temp at 0.5A is a bit too high.
The filament got soft when I extruded very slow (0.5mm/s). At normal print speeds I don't expect problems, but the first layer speed is usually slower and might fail.
Will try with 0.45A for longer periods and add some airflow over the stepper by designing an intake fan shroud for the hotend fan.I also noticed that 20° cant angle doesn't self-lock the filament motion completely, but that is part of my pacemaker strategy. Luckily I've written the code for the remote torque_push motor in such way, that it goes idle without incomming steps.

-
@fma said in Hollow shaft extruder:
@rqthree very cute extruder!
Do you have some more informations about the motors and all vitamins used? Would you share your 3D models?
Thanks,
Frederic, here you go. Change the file extension to .zip from .doc. This forum does not accept zip files.
-
@rqthree Thank you very much!
-
Those rollers that were on funssor store on AliExpress a month or so ago finally showed up. They don't look anywhere near as bad as far as machining quality goes compared to the pictures. Id be hard to pressed to make better ones on the lathe. I'll send some pictures later today, gotta get to bed so I can watch some college football today.
-
@breed I have them on my watchlist, but wait until the price drops.
If it's good enough with one flanged bearing (according to @rqthree ) it doesn't make sense to use three long threaded rods.
I was thinking if making them conical in both directions would be better? But the contact area is so small, it doesn't matter... -
@rqthree There is a problem with these files: Carrier_Assy.FCStd and Knife_Bearing.FCStd ; I'm unable to open them, neither other people at my hackerspace (they freeze or crash FreeCAD).
Could you save them as STEP files?
Thanks, -
@fma said in Hollow shaft extruder:
@rqthree There is a problem with these files: Carrier_Assy.FCStd and Knife_Bearing.FCStd ; I'm unable to open them, neither other people at my hackerspace (they freeze or crash FreeCAD).
Could you save them as STEP files?
Thanks,The files are fine, but were generated with a very high definition version of FreeCad. They will eventually open, but may take many minutes on a pretty high power workstation. In any case, the two files you reference are not at all important, and just show the over-all arrangement of parts.They don't contain any critical dimensions or data not seen in the other files.
-
@rqthree Ok, I see!
-
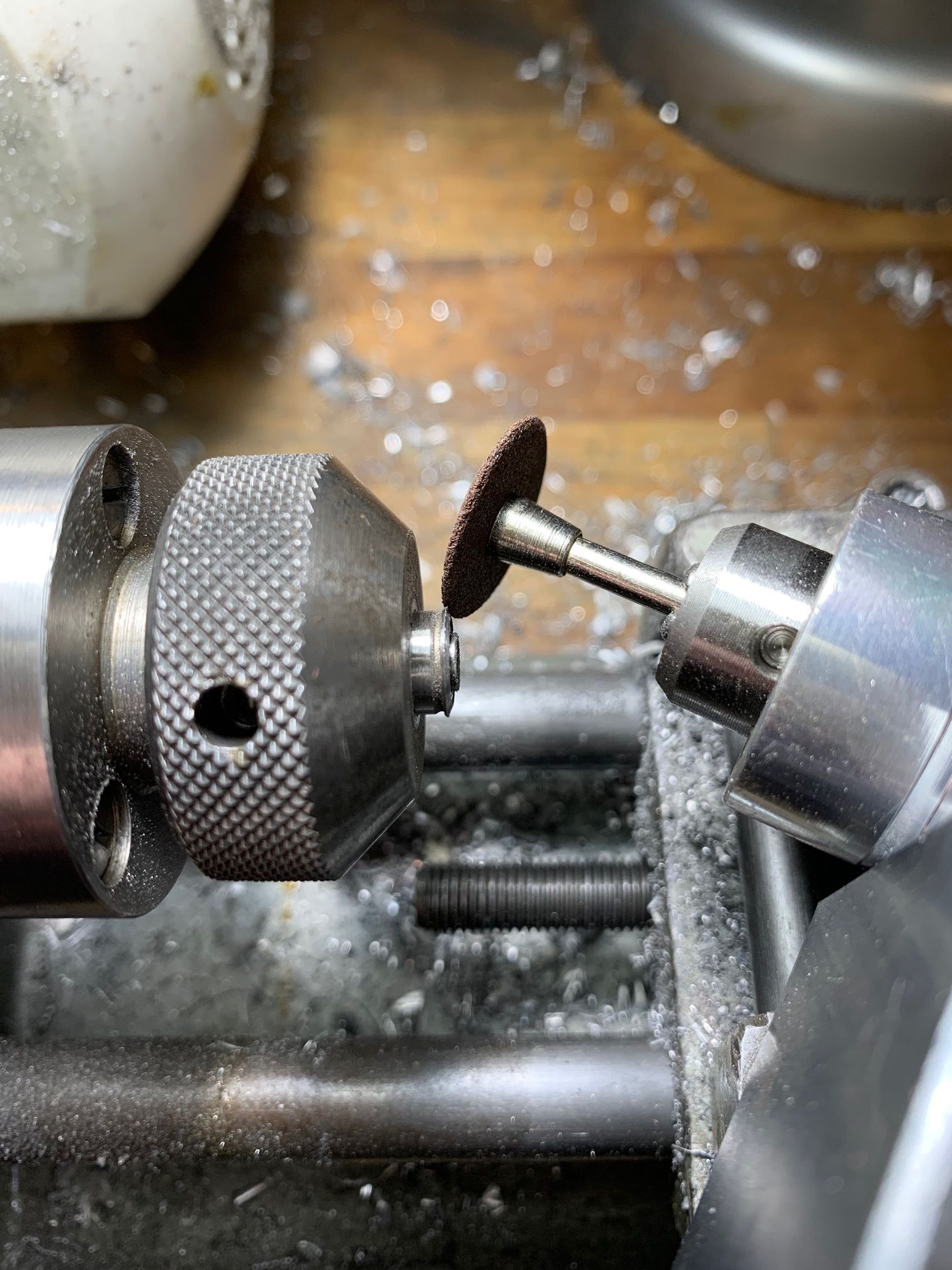
@rqthree BTW, how do you get the sharp edge on the flanged bearing? With a lathe?
-
@fma , yes, I use a collet chuck in a jewelers lathe, with an abrasive disc on a rotary tool. Others, like Tom Brazier, have come up with clever methods that don't require a lathe.
-
@rqthree Thanks, I'll read the entire thread again to see how other guys do...
-
@o_lampe said in Hollow shaft extruder:
@rqthree The left/right rotation is a good idea.
Otherwise It is a bit similar to my dual motor approach, but I'll put a Bowden tube between the two. No weight panelty and free choice for the remote motor.I'm also a bit worried about temperatures and sketched up a thin watercooling plate to fit between your motors. A bit more weight doesn't make much of a difference, you already fouled there anyway
The dual motor Push-Me-Pull-You VDE works fine at 0.2 amps driving two paralleled NEMA 11 motors. The motors get slightly warm after several hours of continuous operation, but nothing that affects even PLA.
-
@rqthree I vote we call this push pull version VDE337.
-
@tombrazier said in Hollow shaft extruder:
@rqthree I vote we call this push pull version VDE337.
Tom, I have to ask...??? I know there is always a method to your madness, but I have wracked my brains on this one.
EDIT: Never mind, you Cessna driver. VDE337 it is!
-
Some updates from me...
I have experimented further with the LDO motor. For everything other than ridiculously fast printing it's great. The primary limitations I have found are that continuous current much above about 600mA will eventually cause it to get too hot for PLA and at any current E jerk needs to remain quite low (e.g. max 7mm/s) for the VDE which has quite a high steps/mm ratio. On the other hand it has great acceleration and speed, I can get 1000mm/s/s even with the high step/mm count of VDE and top speed is about 60mm/s (with no load) and over 10mm/s driving filament into the hot end.
One day I might figure out how to get TMC CoolStep to help with the current. And I have dreams of implementing a jerk-less version of Linear Advance in Marlin which would pretty much remove the jerk limit as an issue.
In other news, I have uploaded a video about the bearing grinder jig.
And, further news, with a PLA printed carrier the 3 back-to-back bearing pairs version of the extruder seems to work pretty well. I have used a bite of 0.07mm for this version. @o_lampe it works a lot better than with your printed carriers which leaves me wondering whether something like material flexibility might be an issue. I am also coming to the conclusion that it's best to grind the bearings first and then measure them and print a carrier to match their edge diameter. That's a lot easier than grinding an edge down to the exact diameter.
-
@tombrazier said in Hollow shaft extruder:
grinding an edge down to the exact diameter.
Both precedures aren't mass-production friendly. The skrewder wraps the screws around the filament which results in adjustable bite and fast changeable filament ability.
If we could change the VDE100 design to be wrappable, it would be best of both worlds.