5bar Scara Homing relative to Zero position
-
@JoergS5 thanks for the fast response.
I made a superfast sketch to visualize what you told me:
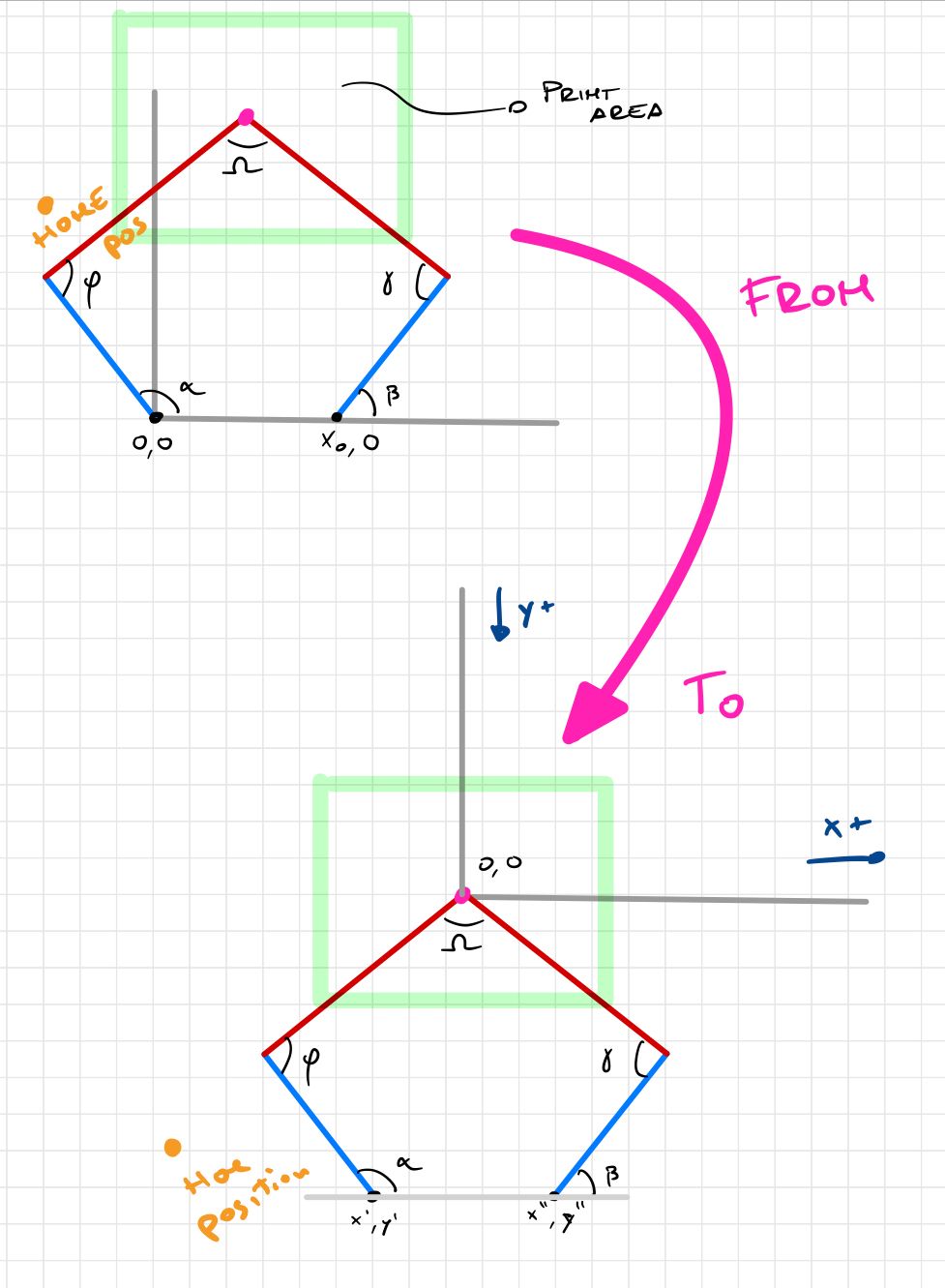
So if I want to set the zero position at the center of my bed, I have to ignore the reprap configurator tool and set all the position by hand right?
This means that first I set the position of my actuators positive in Y, one neg in X and one pos in X.
Than in the homing script after I homed the machine I move the hotend position to the Zero position with gcode, and after that I should be in a correct working position. -
@gnmrc_ I would use the config tool, because it sets a lot of useful parameters. Then you can edit the config.g and the homing files and correct what needs to be corrected.
It's long time ago that I implemented the XY correction, so my memory can be wrong, thatY must be negative in your example and X one neg, one pos.Y could be positive - I am not sure, please try the negative first. So an example would be
Negative is confirmed below
M669 X-150:150 Y-150:-150
for a 300x300 bed with the actuators at the edges.In your second drawing, the Y is in the wrong direction. The right hand rule helps to find the coordinates: thumb is X, index finger is Y, middle finger is Z.
The rest of the procedure is like you described it.
A little glitch in my previous explanation is that Z will be choosen so Z0 is the nozzle on the bed, not an arbitrary value.
-
@JoergS5 the Y needed to be set negative, as you said, thank you so much for the help.
I have another question for you do you think that it could be possible to create some sort of input shaper for a 5bar scara?
-
@gnmrc_ said in 5bar Scara Homing relative to Zero position:
some sort of input shaper for a 5bar scara
That's more a question for David @dc42.
I saw his remarkable video https://www.youtube.com/watch?v=bqf382QDSKY today coincidentally, which is in a big part about input shaping. The 5 bar scara behaves nonlinear in its X, Y axes, so it may be overly complex to calculate the necessary acceleration/deceleration segmentation correctly.
-
This post is deleted! -
Thanks @JoergS5 for the video suggestion, it made more clear how input shaping is implemented in reprap.
About asking @dc42 an idea for implementing input shaping on my build, I have already asked him at the beginning of my project Using Input shaping on a SCARA 3D printer, I think that I will complete my build than try his idea and give a feedback. Hoping that university will give me enough time.
-
@gnmrc_ interesting, I didn't know this old thread.
The scara and 5 bar scara change the direction of the hotend, so your accelerator data may need a correction.
5 bar scara has two change types- the hotend rotates around the Z axis when XY change
- the segmentation into short linear moves will change direction each for every linear segment
Maybe it's the easiest approach to simply try the different input shape methods with different frequency ranges and avaluate the result.
-
@JoergS5 you are right due to the non linear motion system the easiest approach is to test different input shape methods and find the one that works better. Of course a specific approach would work better, but I do not think the time would match the gains relative to a more empiric approach.
-
@gnmrc_ and @JoergS5 I intend to look into other methods of applying input shaping after RRF 3.5.0 is released, including application to nonlinear kinematics.
Which boards do your machines use?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 I only support gnmr and don't have a 5bar printer currently, but if I participate in testing, I will use the Mini 5 Ethernet.
-
@dc42 sorry for answering so late but I was focused on Uni, I’m using an old duet 2 board.
-
@gnmrc_ said in 5bar Scara Homing relative to Zero position:
@dc42 sorry for answering so late but I was focused on Uni, I’m using an old duet 2 board.
As soon as I will have the money I will upgrade the board