G30 stop values increasing each time
-
@dc42 Hi David.
Any news about correct the CAN delays limitation?
We can't use the mesh bed leveling in our printer because this issue.We drive all our axis with 1XD boards connected by CANbus, and driven by absolute encoder closed loop motors (Oriental Motor AZD-K drivers and motors). So we think all the problems regarding probing (located in Z axis) are caused by this timing problem.
-
Hi @marcossf, I have put preliminary firmware that resolves this issue at https://www.dropbox.com/sh/cx760ysonlzzkjd/AACfsVfX4olHipuqmbWut5EKa?dl=0. Please test this firmware with care because I have only tested it using Duet 3 MB6HC + EXP3HC (the Z motor was connected to the EXP3HC).
If you are running your Duet with an attached Raspberry Pi then you must upgrade to RRF 3.4.0beta7 from the package server before you use these files.
You may also be interested in our forthcoming 6XD board, which is similar in many ways to the 6HC board but has ports for connecting external drivers instead of having internal drivers.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 OK, we will test it very soon. Thanks!
The 6XD looks like it will be ideal, for us at least, as the internal motor drivers have never been used in the 6HC. Hopefully I'll be able to buy and test one soon!
-
@marcossf have you had a chance to test this yet?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 Still not, i'm sorry.
We are waiting for some complementary HW to arrive. -
@dc42 said in G30 stop values increasing each time:
Hi @marcossf, I have put preliminary firmware that resolves this issue at https://www.dropbox.com/sh/cx760ysonlzzkjd/AACfsVfX4olHipuqmbWut5EKa?dl=0. Please test this firmware with care because I have only tested it using Duet 3 MB6HC + EXP3HC (the Z motor was connected to the EXP3HC).
If you are running your Duet with an attached Raspberry Pi then you must upgrade to RRF 3.4.0beta7 from the package server before you use these files.
You may also be interested in our forthcoming 6XD board, which is similar in many ways to the 6HC board but has ports for connecting external drivers instead of having internal drivers.
@dc42
I think I have the same issue with my 3 Z motors on the 3HC
I just moved them back to the mainboard.
please see my thread called levelling and mesh.
I can test these files if you think it may help resolve my issue too and will report back.
If so, do i need to copy all the files to my firmware folder or just the mainboards bin file and the 3hc bin file ? -
@mikedc yes they should resolve your issue. You need just the main board file and the files for the 3HC board and any other expansion boards (e.g. tool boards) that you are using.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 are the map files required and do i just upload them via dwc to the firmware folder ?
-
@mikedc you do not need the map files.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 Thankyou
")
I will upload as soon as my current print is finished and put Z back on the 3hc.
Ill let you know here how i get on")
-
Thankyou sooo much
I can confirm it is fixed on the 3HC
Multiprobing each point

and
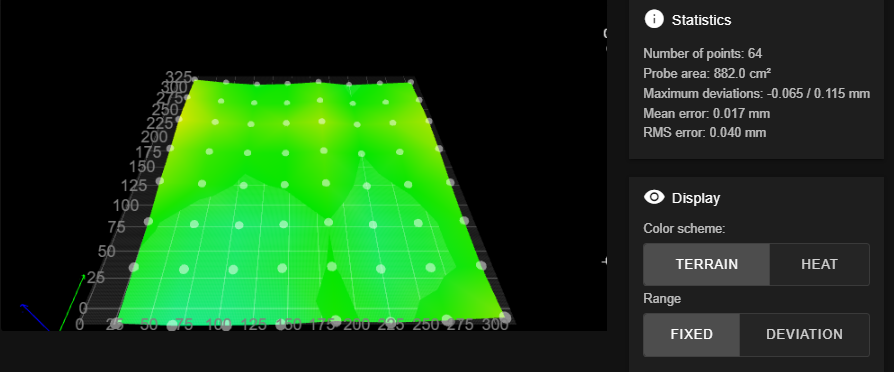
finally getting consistent results with no gradual increase in height from front to back
This is much more like what I had before adding 2 more motors on X/Y and Z was on the mainboard
-
 undefined MikeDC referenced this topic
undefined MikeDC referenced this topic
-
@mikedc thanks for confirming that this is fixed.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 your welcome,
just to let you know, this beta7+2 release also has the same issue as this post with not heating up after a period of idle time
https://forum.duet3d.com/topic/26698/printer-don-t-heat-after-longer-in-idle-state-3-4b7-1/4
-
@mikedc Glad to hear that! Still haven't tested in our HW, but looks promising. The 1XD boards would be the same than 3HC in CAN delays related so I hope this solution also works with them.