Indirect (bearing) laser filament monitor concept
-
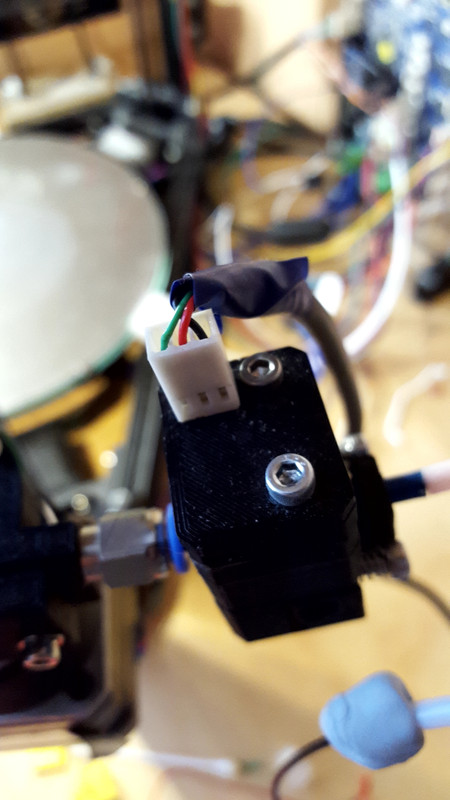
@JADoglio Here is how I am connected to the conn_lcd input:
 , with the connection at the monitor:
, with the connection at the monitor:
This is the snippet from config.g:
;****rrf2****** ;M591 D0 P5 C10 R200:400 E10 S0 A1 ;extruder 0, laser w/o switch, e0 endstop, 40-160% range, 10mm, inactive (S1 active), check all motion ;****rrf3****** M591 D0 P5 C"connlcd.encb" R40:360 E10 S0 A1 ;version for reprap3As you can see I currently use the rrf3 version. Hope this helps.
-
@Adrian52 It helps very much. Thanks
-
@Adrian52 One other question. I have not found a good explanation for when to use the "S" parameter. When it is active does that mean the sensor will detect jams in addition to run outs? I assume when it is inactive it will still detect runouts. Any clarification on this parameter would be helpful. I am also not using the "A" parameter. Should I add that as well and what is its function. Thanks again.
-
@JADoglio my understanding is that with S1, the monitor pauses the print if the extrusion falls outside the specified range. So it will pause on blockages if the extrusion is sufficiently affected. I didn't think you got a pause with S0, even with runout - not sure if this applies with a microswitch added. I have only used A1 so far - will investigate A0 sometime. You do get a pause with S0 if you have a wiring fault - I had some irritating pauses until I fixed a dodgy crimp.
-
@Adrian52 Thanks. You are right even on run out when S is set to 0 it will not stop the extruder. I did that experiment a few days ago and just forgot about it.
-
@Adrian52 what does the A parameter do? I don't see that defined on the reprap g-code wiki site.
-
@mitch see https://duet3d.dozuki.com/Wiki/Gcode#Section_M591_Configure_filament_sensing
An (firmware 2.03 and later) 1 = check All extruder motion, 0 (default) = only check extruder motion of printing moves (moves with both movement and forward extrusion)
Ian
TronXY X5S with Duet 3 MB6HC and Roto toolboard : Cartesian bed-slinger with Duet 3 Mini 5+ WiFi and 1LC : RRP Fisher Delta v1 with Duet 2 Maestro : Polargraph with Duet 2 WiFi
-
@droftarts Thanks
-
I'm waking up this topic, ( deleted mine also ).
Here is my version of indirect filament reading, inspired by your ideas here.
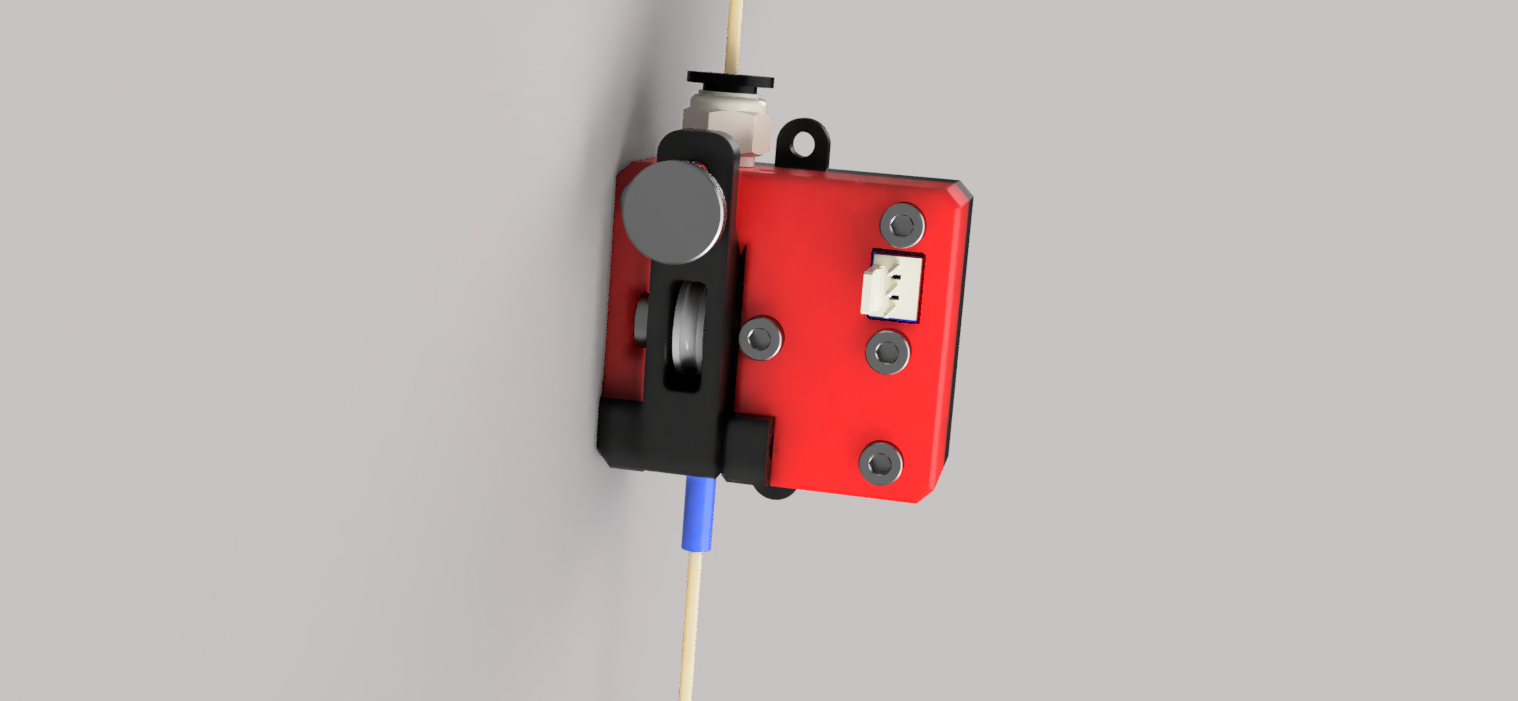
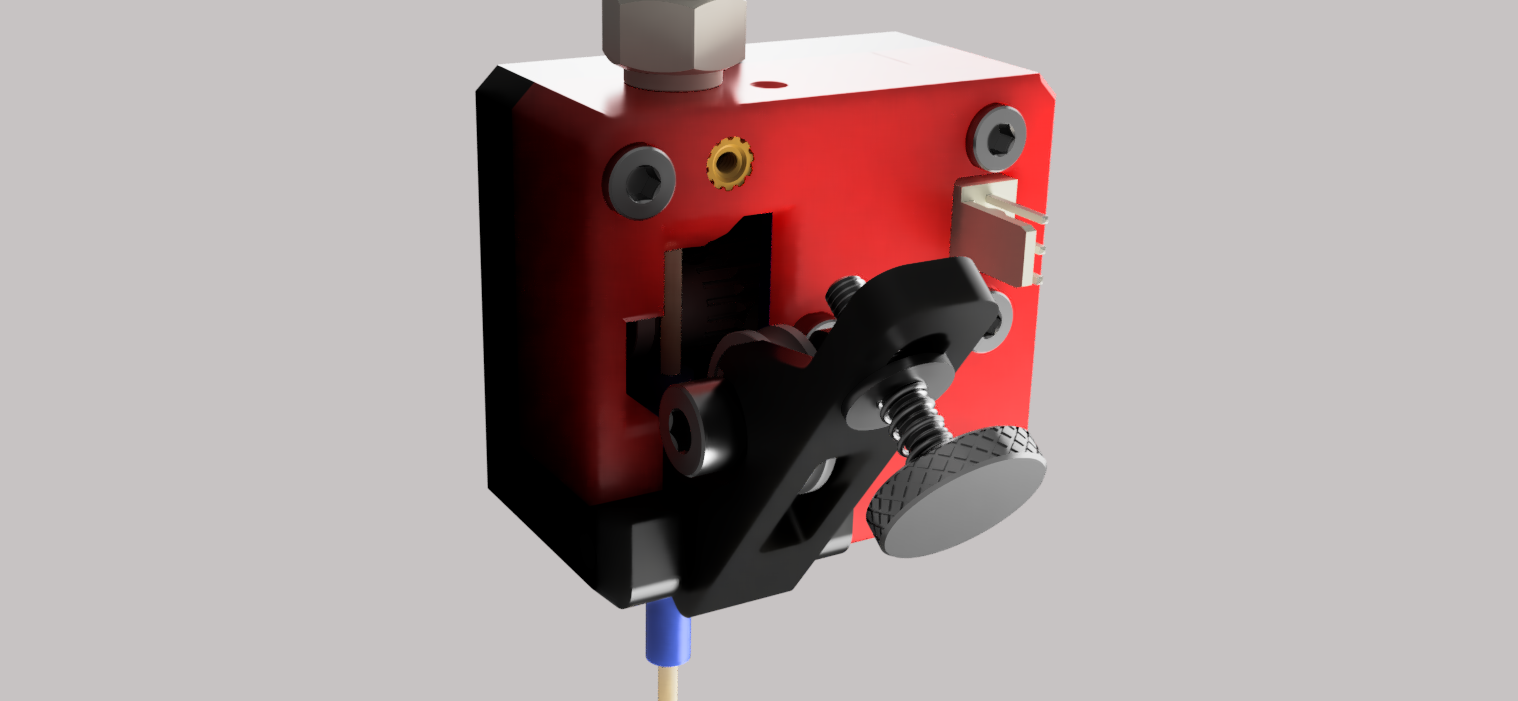
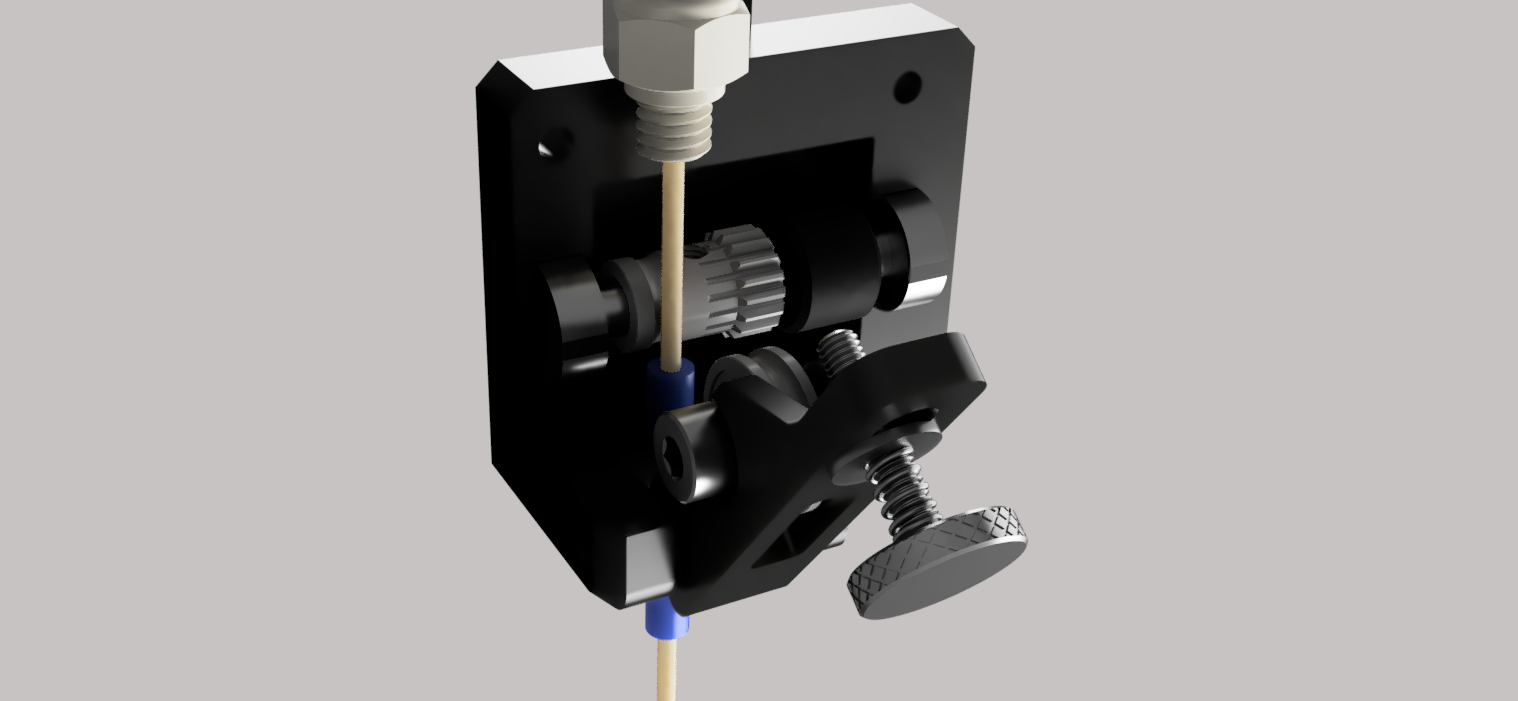
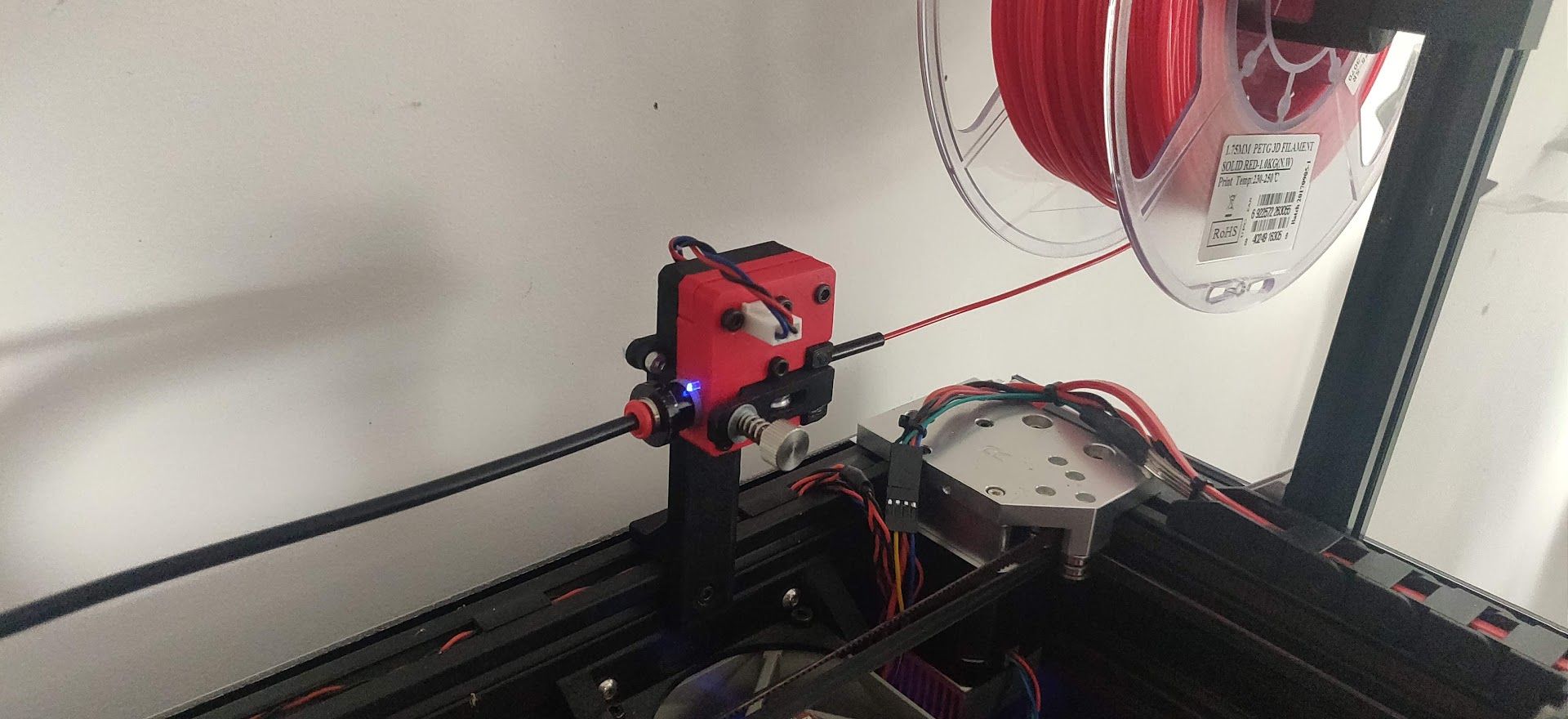
It uses an 5mm shaft hobbed gear from Bondtech and U shape bearing on the latch.
Tensionning can be adjusted from the latch.I use it outside of my DD carriage, don't have any problem with retractions ( considering I have 0.6mm retracts this prollyt explains why ).
https://www.thingiverse.com/thing:4882602
I get readings from 188% to 266% , average 230%. Is it acceptable or should I try to read around the 100% ? I think I can tweak it by adjusting the printed wheel diameter.
-
@kipk you can adjust the calibration factor in RRF 3.2 and later using the M591 L parameter. See https://duet3d.dozuki.com/Wiki/Gcode#Section_M591_RepRapFirmware_Num_3.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 ho that's just perfect then.
-
@brunofporto just use a bondtech hobbed gear - that's what I use and it always engages with the filament to register movement.
-
That's what I use here, bondtech hobbed gear.
So after using the calibration factor + few change on the indirect casing, I now have this reported values :
measured min 93% avg 101% max 107% over 12365.3mm
Looks far better than what I ever achieved with direct reading.
I still have some false trigger because of the PTFE tube moving too fast with high acceleration, I will restrain it before the filament reader. -
 undefined droftarts referenced this topic
undefined droftarts referenced this topic