External stepper drivers shift X axis, Y OK
-
@petrkroupa, a gradual shift (typically 1 microstep per direction reversal) usually indicates that the 3rd or 4th (more often the 3rd) value in the T parameter of the M569 command is too low.
-
-
Just to repeat two identical drivers, both set the same. The problem is only on X. After switching the connectors on 1XD boards (DRV-OUT), X was ok and Y was not. The part, of course, turned 90 degrees.
@DC42 - Yes, it's definitely a gradual shift of two or three steps each layer. When I tried this with MARLIN firmware it was awful and unsolvable. That's why I switched to Duet.
@Phaedrux - timing seting :
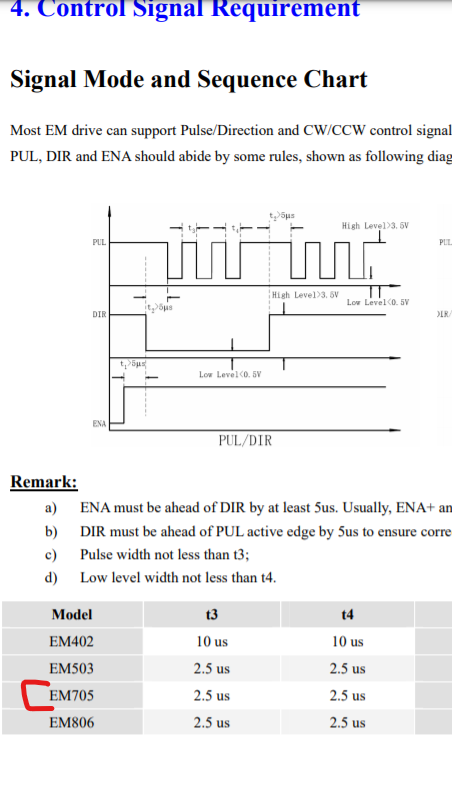
min 2.5 us for pulse and 2.5us for sleep. 5us for direction change.
I also solved that the signal for PULZ should be at 0 and at rest 1. This is possible by simply connecting the outputs from the 1XD card. Connect both outputs for step + and - however, swap them.
I'll try to increase the timing a lot 10: 10: 10: 10 and see what prints.
however, I still don't understand why only one driver does it.
-
@petrkroupa are both drivers running the same firmware version?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 - I tried to find out something about the firmware of these drivers but it seems that the update is not possible. However, the error moves to the second driver after the cables are reconnected. So I don't assume it's EM705. Both 1XDs have the same FW. The print is currently completed with a timing of 10: 10: 10: 10 and the error is the same. I'll try 10: 10: 20: 20 again, but I doubt it.
I will try to change the addresses to 1XD and swap them. Isn't there a mistake here. Any other ideas?
BigOne:Duet3 6HC +1LC + Rpi4, mosquito hotend, 400x400x420
SmallOne : Duet3 6HC +1LC + Rpi4, mosquito hotend, 210x250x210Petr
-
10:10:30:30 it looks a little better. I'll try 10: 10: 50: 50 but that's really extreme....
-
@petrkroupa said in External stepper drivers shift X axis, Y OK:
@dc42 - I tried to find out something about the firmware of these drivers but it seems that the update is not possible. However, the error moves to the second driver after the cables are reconnected. So I don't assume it's EM705. Both 1XDs have the same FW.
What firmware versions are they running? I suggest you use 3.3beta3.
I guess it's possible that one of the boards has a weaker output than the other, so that it needs longer timings to be recognised.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 10: 10: 50: 50 looks almost good. I tried another print and gyroid infill. I had to extremely reduce the M566. X100 Y100 otherwise the steps were lost very much. I'm starting to realize that the EM705 doesn't like fast changes of direction ....
I'll try to upgrade to version 3.3 and do a few more tests, but I'm afraid that I connect the X and Y motor directly to 6HC, increase the supply voltage and I won't waste any more time on us all.
-
Summary:
After approx 1Kg PLA and one dead (fried) stepper motor....
EM705 doesn't like quick changes of direction. Timing can be 3:3:50:50 and the prints look almost good. Unfortunately, M566 X75 Y75 must be set at the same time. I also tried 15: 15: 50: 50 (and more) but the first two numbers have no effect unless they are less than 2. But print is then terribly slow. As soon as I start to increase M566 , there is a shift and then a loss of more steps. Especially with giroid infill.
I checked the timing on the oscilloscope and also found no problem.
I've been figuring out why the shift is only in one X axis. After a thorough measurement, I found a shift in the Y axis, but significantly smaller. I tried different ways to switch between each other (1XD, drivers, motors, wiring....), and in the end I thought of turn the model over and generating GCODE again. The offset has shifted to the Y axis. It only depends on how many aggressive changes of direction are in a given axis. On the calibration cube, the shift was the same in both directions.
Currently, X and Y are connected to the internal Duet3 6HC drivers. The supply voltage is 30V and everything works perfectly. M566 X800.00 Y800.00 Z25.00 E150.00, M203 X18000.00 Y18000.00 Z1400.00 E7500.00, M201 X1250.00 Y1250.00 Z250.00 E5000.00
I think we can close this topic. Personally, I do not recommend using the EM705 on a 3D printer. But of course anyone can try it.
")
-
@petrkroupa Can you use a multimeter and check the current being drawn by the stepper controller on both the PUL and DIR signals?
The manual says the controller needs a minimum of 7 milliAmps, typical 10 ma max 16ma and maybe the Duet isn't driving the built-in optocouplers strongly enough.
Just a longshot.
-
@alankilian -11mA. 4,6V.
It also occurred to me. I tried to add a resistor (just to try) to reduce the current. Nothing has changed until the input voltage is lower than 2.7V. Then the driver stops working completely.