Homing problem COREXY (H-bot)
-
Hi everyone,
I am working on the finishing touches of a high temp printer using the CoreXY (H-bot) system. Everything appears to be working as intended however when I want to home all the axis the printhead only moves a really small amount (2 maybe 3mm) in each axis. Beacaus of this I can't home the printer, also when (trying to) homing, all the axis move in the wrong direction.
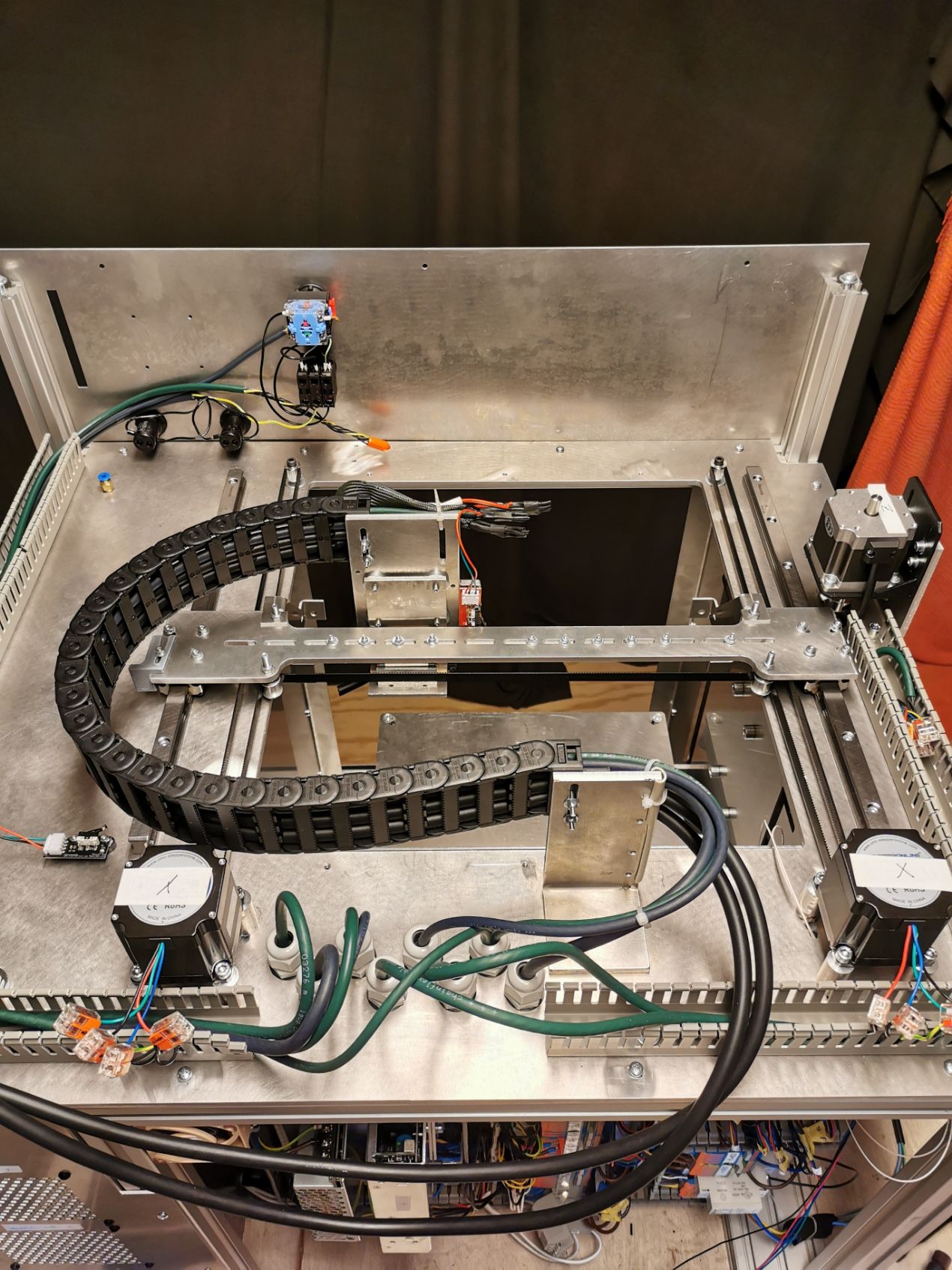
Does someone have an idea why this happens? I have attached the config.g and all the homing files. Also a picture of the H-bot setup.!
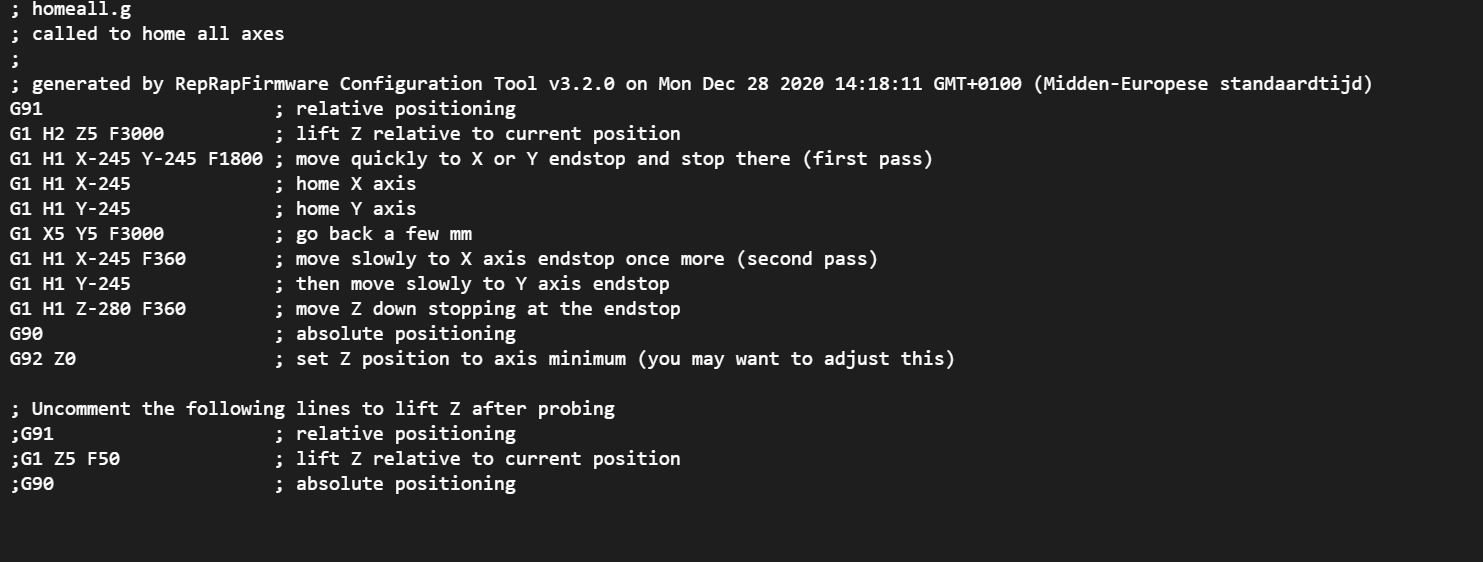
homez.g homey.g homex.g homeall.g config.g -
@Rik-Snelder Motors moving in the wrong direction, means you need to reverse them.
Also, sort movement usually means the endstops are not triggering as expected. Use M119, to make sure they are not stopped when not depressed. Most likely the endstops think you are already at them.
-
@Stephen6309 Thanks for your quick reply. When giving the M119 code I get the following;

The motors are moving the right way, only when homing they move the other way for some reason -
@Rik-Snelder Check your homing files.
The zprobe should only be at min stop with the bed at the nozzle.
-
@Stephen6309 This is what my homingfile looks like, any idea what could be wrong?
-
@Rik-Snelder I dont' see anything wrong. I do see you have Z homing at the bottom of the printer, farthest away from the nozzle. Z0 is at the nozzle, and I'm homing there.
My homeall.g, using a BLTouch and I have the X and Y do the initial home separately.
G91 ; relative positioning
G1 H2 Z10 F6000 ; lift Z relative to current position
G1 H1 X-450 F6000 ; home X axis
G1 X5 F6000 ; go back a few mm
G1 H1 X-405 F360 ; move slowly to X axis endstop
G1 H1 Y-400 F6000 ; home Y axis
G1 Y5 F6000 ; go back a few mm
G1 H1 Y-305 F360 ; then move slowly to Y axis endstop
G90 ; absolute positioning
G1 X189 Y200 F6000 ; go to first bed probe point and home Z
G30 ; home Z by probing the bed
G1 Z10 -
@Rik-Snelder said in Homing problem COREXY (H-bot):
@Stephen6309 Thanks for your quick reply. When giving the M119 code I get the following;
The motors are moving the right way, only when homing they move the other way for some reasonlooks like the stops are wired in such a way as to show them as triggered when the carriage is not near an end stop, i would invert the M574 commands to get them to work, and i would remove the M574 for a Z stop (if you are only running a probe)
See Here
-
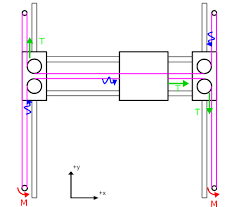
Referring to the picture. The belt routing is looking not like a corexy routing to me.
-
@Manfred53 It is a H-bot design, same as a coreXY just with 1 belt
")
-
@Manfred53 said in Homing problem COREXY (H-bot):
Referring to the picture. The belt routing is looking not like a corexy routing to me.
-
@Rik-Snelder said in Homing problem COREXY (H-bot):
@Manfred53 It is a H-bot design, same as a coreXY just with 1 belt
Have you read why CoreXY is preferred over an HBot?
Frederick
-
@Rik-Snelder said in Homing problem COREXY (H-bot):
@Manfred53 It is a H-bot design, same as a coreXY just with 1 belt
While the kinematic math is the same, they are otherwise sufficiently different that they should be kept distinct.
(Nice printer
)@fcwilt said in Homing problem COREXY (H-bot):
@Rik-Snelder said in Homing problem COREXY (H-bot):
@Manfred53 It is a H-bot design, same as a coreXY just with 1 belt
Have you read why CoreXY is preferred over an HBot?
Frederick
One is a Heath-Robinson contraption that adds a lot of complexity to allow less rigid frames to work acceptably.
The other is prone to racking if the base length of the bearings that support the gantry isn't long enough.Personally, after building a single sided H-bot (which I didn't name, but maybe a T-bot? It was the most Heath-Robinson thing, I wouldn't recommend it to anyone). I rather like a single sided version of whatever the MarkForged kinematics are called.
-
@theruttmeister said in Homing problem COREXY (H-bot):
One is a Heath-Robinson contraption...
What????
I rather like a single sided version of whatever the MarkForged kinematics are called.
My most recent project is a MF style using two Y motors - it works well and racking doesn't seem to be an issue.
Frederick
Printers: a small Utilmaker style, a small CoreXY and a E3D MS/TC setup. Various hotends. Using Duet 3 hardware running 3.4.6
-
@Stephen6309 said in Homing problem COREXY (H-bot):
Motors moving in the wrong direction, means you need to reverse them.
Not always. When homing it can also mean that the endstops are triggered when they shouldn't be and the backwards movement is actually the backoff movement in the homing file.
-
@fcwilt said in Homing problem COREXY (H-bot):
@theruttmeister said in Homing problem COREXY (H-bot):
One is a Heath-Robinson contraption...
What????
Or Rube Goldberg if you're an American.
I rather like a single sided version of whatever the MarkForged kinematics are called.
My most recent project is a MF style using two Y motors - it works well and racking doesn't seem to be an issue.
Frederick
(as we continue to go OT..)
Yeah, I really like it. Its a nice way to get a flying gantry, and if you do want to only use a single Y motor you can probably get away with only extending the bearings on the one side.
Going to fully single sided is mostly because I'm obtuse and like lots of cantilevers in my printers.Back on topic for a second!
Nope, @Phaedrux beat me to it. What he said.
-
@Phaedrux Yea I think that that is happening in my case. It is also a really small movement only a couple of mm
-
Fixed the problem with the end stops! Added a '!' to invert the signal and now is everything working as intended. Thanks!
-
@Rik-Snelder said in Homing problem COREXY (H-bot):
Fixed the problem with the end stops! Added a '!' to invert the signal and now is everything working as intended. Thanks!
which is what i told you to do 2 days ago...............