RepRapFirmware 3.01-beta 3 released
-
@dc42 said in RepRapFirmware 3.01-beta 3 released:
@Ntrack said in RepRapFirmware 3.01-beta 3 released:
Running latest beta (3+1) on duet wifi I get an error
G28 U
Error: in file macro, line 11 column 5: 'else' did not follow 'if'
Error: Homing failedPlease try the new binary at https://www.dropbox.com/sh/3azy1njy3ayjsbp/AACquxr2m00eV568RZg5QG5wa?dl=0.
Just reinstalled the latest firmware for duet wifi .Firmware: RepRapFirmware for Duet 2 WiFi/Ethernet 3.01-beta3+1 (2020-01-30b1) . The issue is still present .
-
@Ntrack said in RepRapFirmware 3.01-beta 3 released:
Just reinstalled the latest firmware for duet wifi .Firmware: RepRapFirmware for Duet 2 WiFi/Ethernet 3.01-beta3+1 (2020-01-30b1) . The issue is still present .
Thanks, I will look into it.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 said in RepRapFirmware 3.01-beta 3 released:
@gtj0 said in RepRapFirmware 3.01-beta 3 released:
@dc42 Apparently you and @chrishamm aren't on speaking terms because the DSF doesn't get the current axis coordinates with the latest 3.01betas.
Which DSF version are you using?
1.2.4.0 which is also the last commit pushed to github
Does M408 S2 report the correct coordinates?
It depends...
The toolhead is in the printable area (not at an endstop or home)"xyz":[-130.000,-125.000,0.000],"machine":[0.000,0.000,0.000],xys is correct but the machine coordinates are always 0.
From the DSF...
move.axes.drives[0].machinePosition always shows 0.000 but...
move.drives[0].position is correct at -130.
I have no idea what the difference between move.axes.drives and move.drives is. -
Thanks, it looks like machinePosition is not being updated. I will investigate it.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 said in RepRapFirmware 3.01-beta 3 released:
@Ntrack said in RepRapFirmware 3.01-beta 3 released:
Just reinstalled the latest firmware for duet wifi .Firmware: RepRapFirmware for Duet 2 WiFi/Ethernet 3.01-beta3+1 (2020-01-30b1) . The issue is still present .
Thanks, I will look into it.
I'm sorry, I can't reproduce that. I don't have an MMU, so I had to modify your file to try to cover all possibilities. Can you produce the same error using a similar file that doesn't refer to any object model variables?
PS - please also check whether the same issue occurs on the 3.01-beta3+1 (2020-01-31b2) build, now in the same location.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 said in RepRapFirmware 3.01-beta 3 released:
Thanks, it looks like machinePosition is not being updated. I will investigate it.
Fixed in latest build on dropbox, 3.01-beta3+1 (2020-01-31b2) .
-
@dc42 It seems to be fixed now on 3.01-beta3+1 (2020-01-31b2) . Thank you.
-
(I feel like I might have read something about this before, but I can't find it..)
Is it known/intentional that uploading "Duet3Firmware_MB6HC.bin" to DWC 2.0.7/System/"Upload System File" on a duet3 (standalone) does not trigger a prompt for updating the firmware?
The firmware loads properly if I send "M997" from the console.
"I'm not saying that you are wrong - I'm just trying to fit it into my real world simulated experience."
-
@dc42 The commit with the update for the machine coordinates looks like it also has CAN changes but the most recent CANlib doesn't have the support for it. Forget to push up a new CANlib?
nvoking: Cross G++ Compiler arm-none-eabi-g++ -std=gnu++17 -D__SAME70Q20B__ -DRTOS -DDUET3_V06 -D_XOPEN_SOURCE -I"/usr/src/3d/dc42/workspace/RRFLibraries" -I"/usr/src/3d/dc42/workspace/FreeRTOS" -I"/usr/src/3d/dc42/workspace/CoreNG" -I"/usr/src/3d/dc42/workspace/CANlib" -I"/usr/src/3d/dc42/workspace/CoreNG/cores/arduino" -I"/usr/src/3d/dc42/workspace/CoreNG/libraries/Flash" -I"/usr/src/3d/dc42/workspace/CoreNG/libraries/SharedSpi" -I"/usr/src/3d/dc42/workspace/CoreNG/libraries/Storage" -I"/usr/src/3d/dc42/workspace/CoreNG/libraries/Wire" -I"/usr/src/3d/dc42/workspace/CoreNG/asf" -I"/usr/src/3d/dc42/workspace/CoreNG/asf/common/utils" -I"/usr/src/3d/dc42/workspace/CoreNG/asf/common/services/clock" -I"/usr/src/3d/dc42/workspace/CoreNG/asf/common/services/ioport" -I"/usr/src/3d/dc42/workspace/CoreNG/asf/sam/components/ethernet_phy/ksz8081rna" -I"/usr/src/3d/dc42/workspace/CoreNG/asf/sam/drivers" -I"/usr/src/3d/dc42/workspace/CoreNG/asf/sam/drivers/gmac" -I"/usr/src/3d/dc42/workspace/CoreNG/asf/sam/services/flash_efc" -I"/usr/src/3d/dc42/workspace/CoreNG/asf/sam/utils" -I"/usr/src/3d/dc42/workspace/CoreNG/asf/sam/utils/cmsis/same70/include" -I"/usr/src/3d/dc42/workspace/CoreNG/asf/sam/utils/header_files" -I"/usr/src/3d/dc42/workspace/CoreNG/asf/sam/utils/preprocessor" -I"/usr/src/3d/dc42/workspace/CoreNG/asf/thirdparty/CMSIS/Include" -I"/usr/src/3d/dc42/workspace/CoreNG/variants/same70" -I"/usr/src/3d/dc42/workspace/RepRapFirmware/src" -I"/usr/src/3d/dc42/workspace/RepRapFirmware/src/Networking" -I"/usr/src/3d/dc42/workspace/RepRapFirmware/src/Networking/LwipEthernet" -I"/usr/src/3d/dc42/workspace/RepRapFirmware/src/Networking/LwipEthernet/Lwip/src/include" -I"/usr/src/3d/dc42/workspace/DuetWiFiSocketServer/src/include" -I"/usr/src/3d/dc42/workspace/FreeRTOS/src/include" -I"/usr/src/3d/dc42/workspace/FreeRTOS/src/portable/GCC/ARM_CM7/r0p1" -I"/usr/src/3d/dc42/workspace/RRFLibraries/src" -I"/usr/src/3d/dc42/workspace/CANlib/src" -O2 -Wall -c -mcpu=cortex-m7 -mthumb -mfpu=fpv5-d16 -mfloat-abi=hard -mno-unaligned-access -ffunction-sections -fdata-sections -fno-threadsafe-statics -fno-rtti -fexceptions -nostdlib -Wundef -Wdouble-promotion -Werror=return-type -fsingle-precision-constant "-Wa,-ahl=EndstopsManager.s" -MMD -MP -MF"src/Endstops/EndstopsManager.d" -MT"src/Endstops/EndstopsManager.o" -o "src/Endstops/EndstopsManager.o" "../src/Endstops/EndstopsManager.cpp" ../src/GCodes/GCodes2.cpp: In member function 'bool GCodes::HandleMcode(GCodeBuffer&, const StringRef&)': ../src/GCodes/GCodes2.cpp:4338:27: error: 'ChangeAddressAndNormalTiming' is not a member of 'CanInterface' result = CanInterface::ChangeAddressAndNormalTiming(gb, reply); ^~~~~~~~~~~~~~~~~~~~~~~~~~~~ ../src/GCodes/GCodes2.cpp:4342:27: error: 'ChangeFastTiming' is not a member of 'CanInterface' result = CanInterface::ChangeFastTiming(gb, reply); ^~~~~~~~~~~~~~~~ -
I'm sorry about that, I've committed it now.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@garyd9 said in RepRapFirmware 3.01-beta 3 released:
(I feel like I might have read something about this before, but I can't find it..)
Is it known/intentional that uploading "Duet3Firmware_MB6HC.bin" to DWC 2.0.7/System/"Upload System File" on a duet3 (standalone) does not trigger a prompt for updating the firmware?
The firmware loads properly if I send "M997" from the console.
It's know but not intentional. I'll ask @chrishamm to fix it in a future DWC release.
-
@dc42 said in RepRapFirmware 3.01-beta 3 released:
I'm sorry about that, I've committed it now.
Still not working. Even with the "Added CanSettings::ClockFrequency" commit, ChangeAddressAndNormalTiming and ChangeFastTiming aren't in CANlib.
-
There's a new commit of RepRapFirmware coming soon.
-
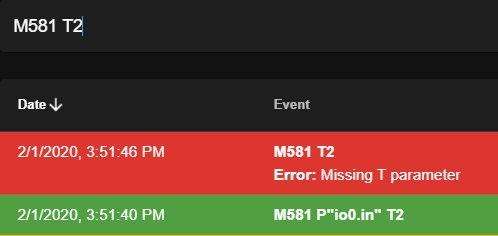
I always get an error when I want the trigger no. Query.
Has the behavior changed with RF3, or an error?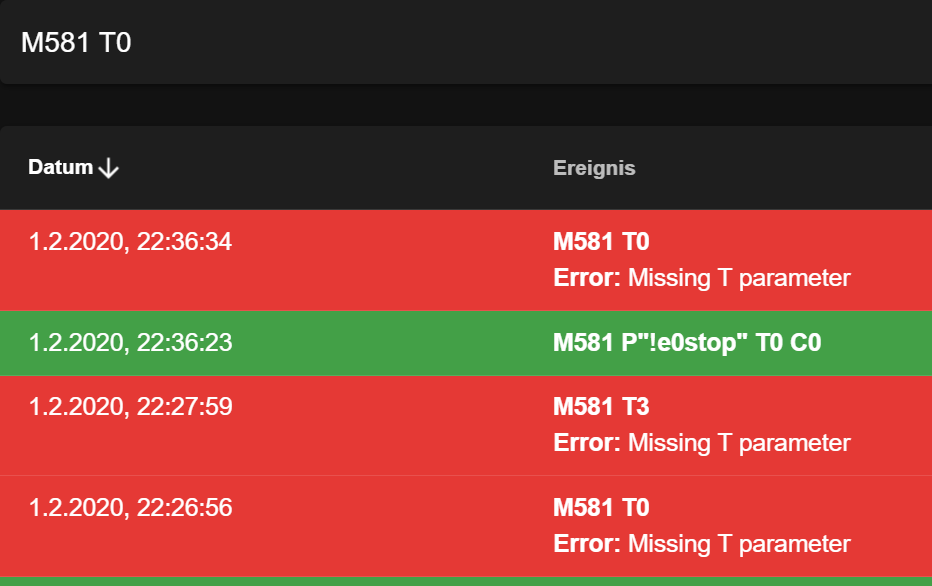
-
Board: Duet 3 MB6HC (MB6HC)
DSF Version: 1.2.4.0
Firmware: RepRapFirmware for Duet 3 MB6HC v0.6 or 1.0 3.01-beta3 (2020-01-29b1)Also get the error.
-
Thanks for reporting this. I've fixed it in the latest internal builds at https://www.dropbox.com/sh/3azy1njy3ayjsbp/AACquxr2m00eV568RZg5QG5wa?dl=0.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 Seems to be fixed

With
M98 P "config.g"I get the following errors:Error: M307: Heater 3 not found Error: M307: Heater 4 not found Error: M307: Heater 5 not found Error: M307: Heater 6 not found Error: M307: Heater 7 not foundAm i missing something?
; Heaters M308 S0 P"spi.cs1" Y"rtd-max31865" ; configure sensor 0 as thermocouple/PT100 via CS pin spi.cs1 M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0 M307 H0 B0 ; aktiviert den PID-Modus Heizbett M301 H0 P124.55 I23.46 D165.29 ; alter PID-Werte Heizbett von UM M143 H0 S101 ; Set temperature limit for heater 0 to 101C M140 H0 ; map heated bed to heater 0 M308 S1 P"spi.cs2" Y"rtd-max31865" ; configure sensor 1 as thermocouple/PT100 via CS pin spi.cs2 M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1 M143 H1 S265 ; Set temperature limit for heater 1 to 265C M308 S2 P"spi.cs3" Y"rtd-max31865" ; configure sensor 2 as thermocouple/PT100 via CS pin spi.cs3 M950 H2 C"e1heat" T2 ; create nozzle heater output on e1heat and map it to sensor 2 M143 H2 S265 ; Set temperature limit for heater 2 to 265C -
Those M307 commands for non-existent heaters are probably in config-override.g and were put there by RRF2. You can delete them.
-
I am currently looking for the endstop inputs of E0 (e0stop) and E1 (e1stop)
M409 K"sensors.endstops" F"v"shows only three -
@zerspaner_gerd said in RepRapFirmware 3.01-beta 3 released:
I am currently looking for the endstop inputs of E0 (e0stop) and E1 (e1stop)
M409 K"sensors.endstops" F"v"shows only threeThe sensors.endstops variable only reports inputs configured as endstops. I need to add a separate section for other inputs.
Possible temporary workaround: create two additional axes e.g. U and V, and hide them using the M584 P parameter. Then you can assign those two endstop inputs to those axes using M574, and then they should be visible in sensors.endstops.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com