A more dodegy approach would be, to physically attach a speed potentiometer of a stepper driver circuit to a small hobby servo motor, the servo motor could than turn the speed of the stepper motor / peristslt pump, it's a bit dodgy but it works, I have done it before..
Posts made by Tricep terry
-
RE: Run external Stepper driver with Duet PWM signalposted in General Discussion
-
RE: CE Certificationposted in Duet Hardware and wiring
@DocTrucker Many thanks for your quick response, I'm aware of what you are stating and of course, agree with it, however, I was just wondering since they mentioned that they are drafting the CE guidelines, what the current state of it is.
Also in several posts, they mentioned upcoming changes that would improve certain things which may or may not reduce the required level of protection for the boards in terms of EMC, but then the results of those changes were not communicated anymore.
And of course, duet cannot provide the necessary documentation that would make any machine built with their board automatically pas CE certification, but some updated requirements on these things after the tests / general guidelines would be sweet.
-
RE: CE Certificationposted in Duet Hardware and wiring
@dc42 since this post is rather old by now already, what is the current state of the boards also for the Duet 3 mini 5+ wifi with external antenna? And what are the wifi power ratings of the boards?
-
RE: Losing USB connection when restart laptopposted in General Discussion
@chrishamm that indeed did the trick. It also fixed the issue with the order of powering the device. Many thanks.
-
RE: Losing USB connection when restart laptopposted in General Discussion
@chrishamm I've a duet 3 mini 5+
-
RE: Losing USB connection when restart laptopposted in General Discussion
I've updated to V3.4.6 but the issue persists, I don't think it is my python code as the issue is also there when I do the following:
-
plug in USB cable into PC
-
open YAT terminal
-
send M115 to test for connection, which than responses as intended
-
close YAT
-
restart laptop
-
open YAT terminal
-
send M115 to test for connection, no response, while the terminal at the bottom right says that the com port is open and connected
to restore the functionality:
- un plug USB cable
- plug in USB cable
- send M115 to test for connection, which than responses as intended
Could you let me know if by performing this sequence of events, you obtain similar results?
-
-
RE: Losing USB connection when restart laptopposted in General Discussion
Dear Phaedrux @Phaedrux
Sorry for the missing details, I'll explain the scenario more clearly.
I've a thirty party software that uses python to send single line Gcode to the duet over USB, the USB is connected via a USB isolated (adafruit, the recommended one by duet). When I leave my USB plugged into the laptop and I restart the computer, the communication with the Duet stops, for example if I after restarting the PC open the YAT terminal and send something like M115, i get no response.
If i unplug the USB cable and plug it back in, the connection is restored and I can send codes via YAT as usual.
Furthermore, If I power my duet by VIN first and then plug in the USB cable the same behaviour is present as in no communication to duet via programs like YAT. With or without the USB isolator makes no difference (I only test this if my laptop is running on batteries) so the problem is not with the USB isolator.
I've checked and tried to change USB suspend behaviour, but this did not fix the issue.
Is there something else I could try?
Kind regards,
-
Losing USB connection when restart laptopposted in General Discussion
Dear All,
I'm controlling my duet over USB, but i noticed that when I restart my laptop, while the USB is still connected to the duet, that upon start up, the duet is not responding anymore. It than requireres me to unplug the USB and to plug it back in, which is a bit enoying. I also noticed that when i power my duet first from the VIN and than plug in my USB, it is not responding aswell.
I there any way to circumvent this behaviour?
Kind regards
-
powering duet Vin via relay over USBposted in Duet Hardware and wiring
Dear Duet,
I would like to power up my duet (the Vin voltage) over USB. So sending a command that switches a relay so that 24v is now supplied to the board.
How would i go about this, should i use the PS-on and correspond ground next to it to go to the relay and than send M80 over USB to power it on?
Kind regards,
-
RE: stepper motor shielding with desktop sytle dc power adaptersposted in Duet Hardware and wiring
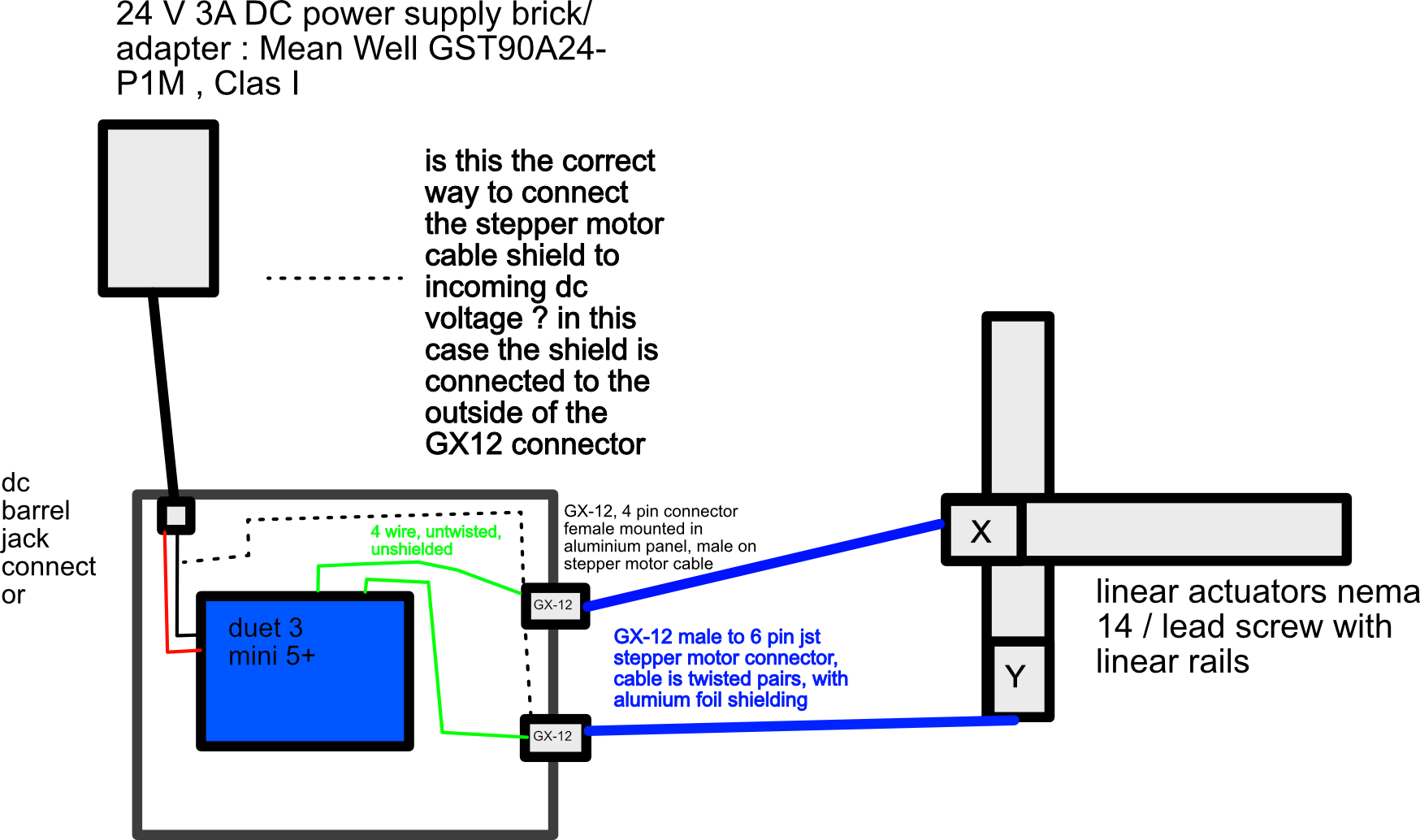
@dc42 many thanks for the response, the panels / enclosure is anodized aluminium, which is not conducting, so the gx-12 are not really in continuity with the enclosure (at least in a reliable sense), maybe if I would screw them overly tight it would. However, the enclosure is floating and no AC is coming in but only 24v DC, so grounding the whole enclosure is not necessary as far as I'm aware.
The power supply I'm using only outputs a floating DC voltage
(class 1) through the barrel jack connector, therefore I'm a bit confused about your last command. Would the shield still work/be effective if it is only connected to the negative terminal of the floating 24v dc PSU as in the following image: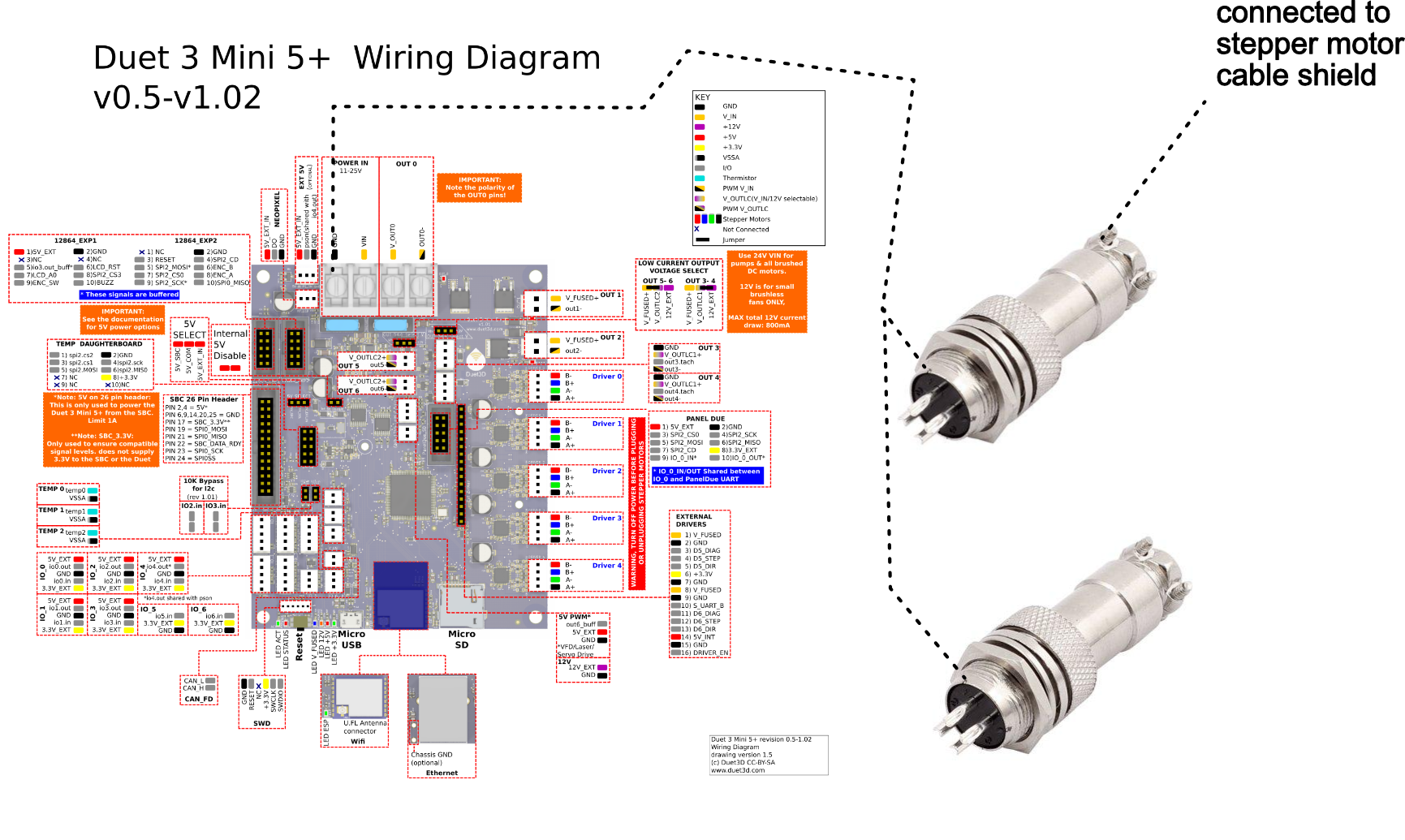
To me, it just looks a bit odd..
regarding connecting it to the stepper motor body, I've encountered many conflicting opinions on various build forums.. with many people saying you should only connect it to one side (controller side) so I'm still a bit in doubt about what to do with it.
-
stepper motor shielding with desktop sytle dc power adaptersposted in Duet Hardware and wiring
Dear All,
I've been going through a lot of posts but couldn't find a clear answer, while this might be relevant to others as well.
I'm designing a simple xy motion system with a duet 3 mini 5+ only two linear actuators (nema 14 running at 0.7A, leadscrew with linear rails). There is not a lot of power consumption so a 3A 24v power supply is more than enough, therefore I use these desktop power adapters (Mean Well GST90A24-P1M). The duet is housed in an anodized aluminium enclosure with only cut-outs for mounting the antenna, dc barrel adapter and female GX12 connectors. all wires inside the aluminium enclosure have ferrite chokes around them close to the board.
For the stepper motor cables, I'm using twisted pairs of cables (75cm long) with an aluminium foil shield around them and of course the black isolation. Now I think, going over all the posts about EMI / EMC, this should be sufficient, since this is only the bare minimum the duets are capable of doing, with low motor currents, twisted pair wires and ferrite chokes.
Now since the cables have shielding, I'm thinking of further improving the EMI/EMC capabilities by somehow grounding this shield, however, I'm a bit uncertain on how to do this with the power supply I've at hand. I'm not too afraid of static charges on the motor side since I'm not using any belts so I prefer to not connect the shield to the motor for aesthetic reasons
should I do it as in the following diagram? So connecting the shield to the outside of the GX-12-4pin connector, and then wiring the outside of the GX-12-4pin connector to the gnd terminal on the duet board inside the enclosure with each outside GX-12-4pin connector connected to each other?
-
RE: Another question regarding ground loopsposted in Duet Hardware and wiring
many thanks for your fast response, so a clas I or class II power supply brick will not make a difference?
Kind regards
-
Another question regarding ground loopsposted in Duet Hardware and wiring
Dear Duet,
I'm building a simple XY motion system using a duet3 mini 5+, it is only connected to two nema14 motors at 0.7A.
The duet board is driven through a Python script and the easiest and currently working way is by sending the commands over USB to the duet. only (G90 G1 X... Y.... F...) commands are send. I don't need to upload big gcode scripts or files, but may commission some macro's in the future.
I noticed that when connecting the duet to a PC or laptop i should look out for ground loops. therefore I plan to use a floating power supply (Mean Well GSM90B24-P1M 24 V/DC 3.75 A 90 W) to power the duet. I also ordered the Adafruit USB isolated that was advised on the ground loop prevention page.
I think this should eliminate all possibilities of a ground loop to occur, or am I overseeing something? Would installing the adafruit USB isolated still be relevant as the board is not connected to earth by the PSU? Just want to be absolutely shore, don't want to break my expensive PC or connected equipment
")
better safe than sorry...
Kind regards,
-
multiple 5v pwm outputs on duet 3 mini 5+posted in General Discussion
Dear all,
A small question here, I need two 5v pwm gcode controlled outputs to drive some external circuit but I noticed on the pinout for the duet 3 mini 5+ it only has one (for laser control). What would therefore be the best option to accomplish this or are there some pins that could also be utilized?
I know there are multiple 3v outputs that I could use but for the device to be controlled, it would mean that I can not drive it at full power as it desires a 0 to 5v input.
I'm therefore thinking to perhaps use an arduino nano to read two 3v outputs from the duet and scale that to two 5v pwm outputs of the arduino, however, this does seem a bit finicky for such a simple task therefore i would like to know if somebody has a better alternative..?
-
RE: Axis losing homed state, using sensorless homingposted in Tuning and tweaking
@fcwilt I see, strange that I never noticed this before, thanks for the clarification
-
Axis losing homed state, using sensorless homingposted in Tuning and tweaking
Dear all,
I noticed that when using sensorless homing, the state of the axis being homed changes from homed to unhomed when power to the motor is shut off by M906 / M85 command in the config file. I can see how this makes sense as the motor may lose a few steps, but is there a way to circumvent this behaviour?
Kind regards
-
RE: Duet WiFi 2 and Duet 5 +5Mini Connect to DWC Issuesposted in Duet Web Control
Sounds like an similar issue I've previously run into with the same setup and it turned out to be a SD card issue. The solution that worked for me was that I took a different SD card, correctly formatted it to FAT32 if I remember correctly and than copied the files from the SD card in the duet to the new SD card, also make sure to save a back up somewhere.
If you boot up the page (in chrome), then right mouse button click inspect, and than go to the tab console, it may log an error (in my case) that it couldn't find the WWW folder which pointed me to exchanging the SD card.
-
RE: Maintenance reminderposted in Gcode meta commands
@OwenD many thanks for the clearly written explanation with examples, definitely going to give this a shot in the next few days!
-
RE: Incomplete movements at verry low speeds and long durationsposted in Tuning and tweaking
I've been playing with this while loop function and it works great, however, I do have a question,
suppose I have a one general while loop that gives the steps for the axis A, B, C, D, U, V, W and Feedrate F
if I would only like to use axis A with 500 steps, but not B, C, D, U, V, and W so I'll send 0 or -0 steps for them (my while loop always sends relative moves). This works fine, but my question is, if I would also not configure them in the config file, would this harm anything as I noted in the documentation that you should not refer to axes that are not created, however, if I would just send -0 steps would this actually ruin/harm something?
If so, I suppose I could create 128 if statements with while loops (for all possible combinations) to check if the param is equal to 0.
this just makes it marco file a bit more tedious and prone to error, and so far I've tested both ways and there seems no performance issue even if the axes are not created in the config file so that just makes me wonder why this is so clearly stated in the documentation.
I do this cause sometimes I change the setup to use the XYZ axis with different steps/mm etc