Thanks to everyone here the printer is printing... I am waiting on terminals to finish the CR Touch install and I'm pretty much ready to play with it.
[center]
 [/center]
[/center]
Thanks to everyone here the printer is printing... I am waiting on terminals to finish the CR Touch install and I'm pretty much ready to play with it.
[center]
[/center]
@jrcl Does VIN stand for Voltage In, then?
@jrcl Again, thanks. It has finished the auto-tune and gave me this message:
Auto tuning heater 0 completed after 3 idle and 5 tuning cycles in 998 seconds. This heater needs the following M307 command:
M307 H0 R0.532 K0.167:0.000 D13.56 E1.35 S1.00 B0
Edit the M307 H0 command in config.g to match this. Omit the V parameter if the heater is not powered from VIN.
I didn't see a "V" parameter in that line of code and am not sure what VIN means in this context, in any event. I easily found the line of code in my config.g and have replaced it.
@jrcl Thanks... I think I missed a "u" argument which would have used the result, so I might have to rerun it or go your route.
Sry, this was too easy and I gave up before I needed to. I found this code and am running it now...
m303 h0 s100
Perhaps this is a "PID Tune" issue, and if so, how do I do that?
Whenever I start my bed heater I get Error: Heater 0 fault: temperature rising too slowly: expected 2.30°C/sec measured 0.57°C/sec
How do I change this value? Do I need to change the heater?
This is a 120V bed heater running through a solid-state drive. It is giving 120V to the heater.
; Configuration file for Duet WiFi (firmware version 3.3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.3.10 on Tue May 10 2022 16:57:14 GMT-0400 (Eastern Daylight Time)
; General preferences
M575 P1 S1 B57600 ; enable support for PanelDue
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"TEVO" ; set printer name
; Network
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S1 ; enable Telnet
; Drives
M569 P0 S1 ; physical drive 0 goes forwards
M569 P1 S1 ; physical drive 1 goes forwards
M569 P2 S1 ; physical drive 2 goes forwards
M569 P3 S0 ; physical drive 3 goes forwards
M584 X0 Y1 Z2 E3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z400.00 E932.00 ; set steps per mm
M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2)
M906 X800 Y800 Z800 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X360 Y366 Z400 S0 ; set axis maxima
; Endstops
M574 X1 S1 P"!xstop" ; configure switch-type (e.g. microswitch) endstop for low end on X via pin !xstop
M574 Y1 S1 P"!ystop" ; configure switch-type (e.g. microswitch) endstop for low end on Y via pin !ystop
M574 Z1 S1 P"!zstop" ; configure switch-type (e.g. microswitch) endstop for low end on Z via pin !zstop
; Z-Probe
M558 P9 R0.4 C"zprobe.in+zprobe.mod" H5 F1200 T6000 ; set Z probe type to effector and the dive height + speeds
G31 P500 X0 Y0 Z2.5 ; set Z probe trigger value, offset and trigger height
M557 X15:285 Y15:285 S20 ; define mesh grid
; Heaters
;M308 S0 P"bedtemp" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin bedtemp
;M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0
;M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit
;M140 H0 ; map heated bed to heater 0
;M143 H0 S120 ; set temperature limit for heater 0 to 120C
;M308 S1 P"e0temp" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin e0temp
;M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1
;M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
;M143 H1 S280 ; set temperature limit for heater 1 to 280C
; Heaters V2
; Heaters
M308 S0 P"bedtemp" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin bedtemp
M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0
M307 H0 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S1 P"e0temp" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin e0temp
M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S280
; Fans
M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
; Tools
M563 P0 S"BiquH2" D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C
; Custom settings
M575 P1 S1 B57600
@stephen6309 & @fcwilt thanks to both of you... that really helps a lot. My mod wire needs to be connected to exp HEATER3. "exp" means expansion header. Cool. Simple enough to do.
Now, how do I define HEATER3 as the real "Mod"? Do I have to edit config.g and add it somewhere?
@fcwilt and @Stephen6309 It's a big doc with lots of illustrations. Can you be more specific with the pic you want me to see? Maybe post it here? I'm just a noobie and a bit overwhelmed. but I'm really trying.
The documentation says "9 BLTouch OUT (Duet 3) and MOD (Duet 2 Maestro) can be configured to control deployment/retraction. MOD on Duet 2 WiFi/Ethernet is not PWM capable, so use heater pin on expansion port instead." I have a Duet 2 WiFi, so please translate.
@fcwilt Thanks for the quick reply...
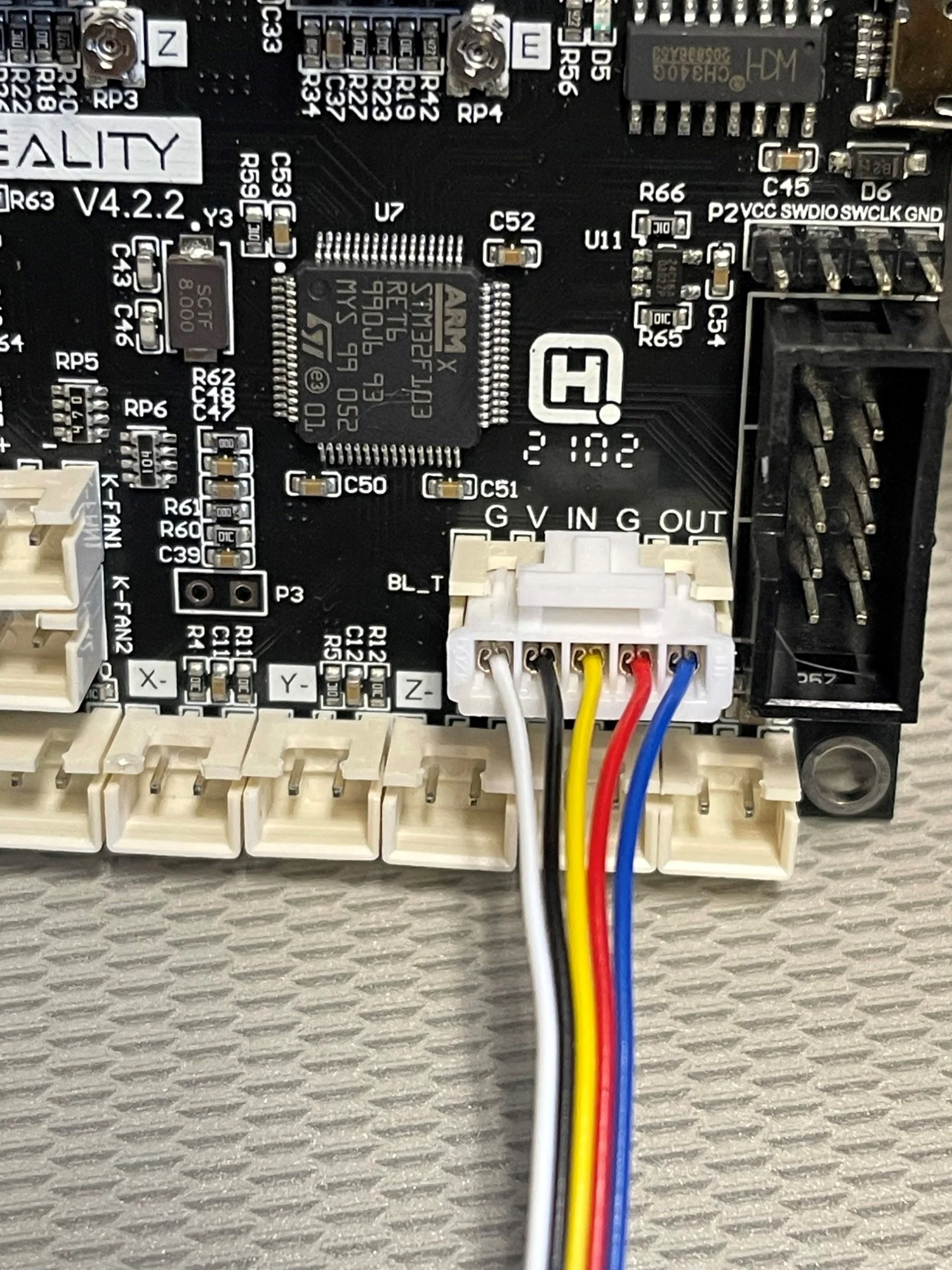
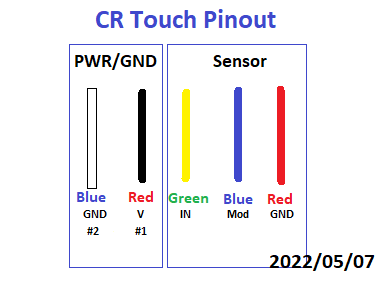
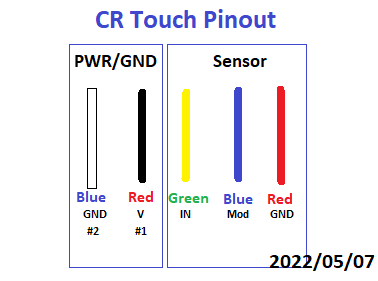
This is the photo of the CR Touch going into a Crealty board... it's the only pinout of the wires I could find for it. The only difference is that it says "out" instead of "mod". Other than that, I think I have wired it just as a BL Touch. Do you have a specific wire you think is wrong, or was that just a general comment?
Someone has mentioned that the CR Touch is a clone of the BL Touch. That assumption could be the real problem.
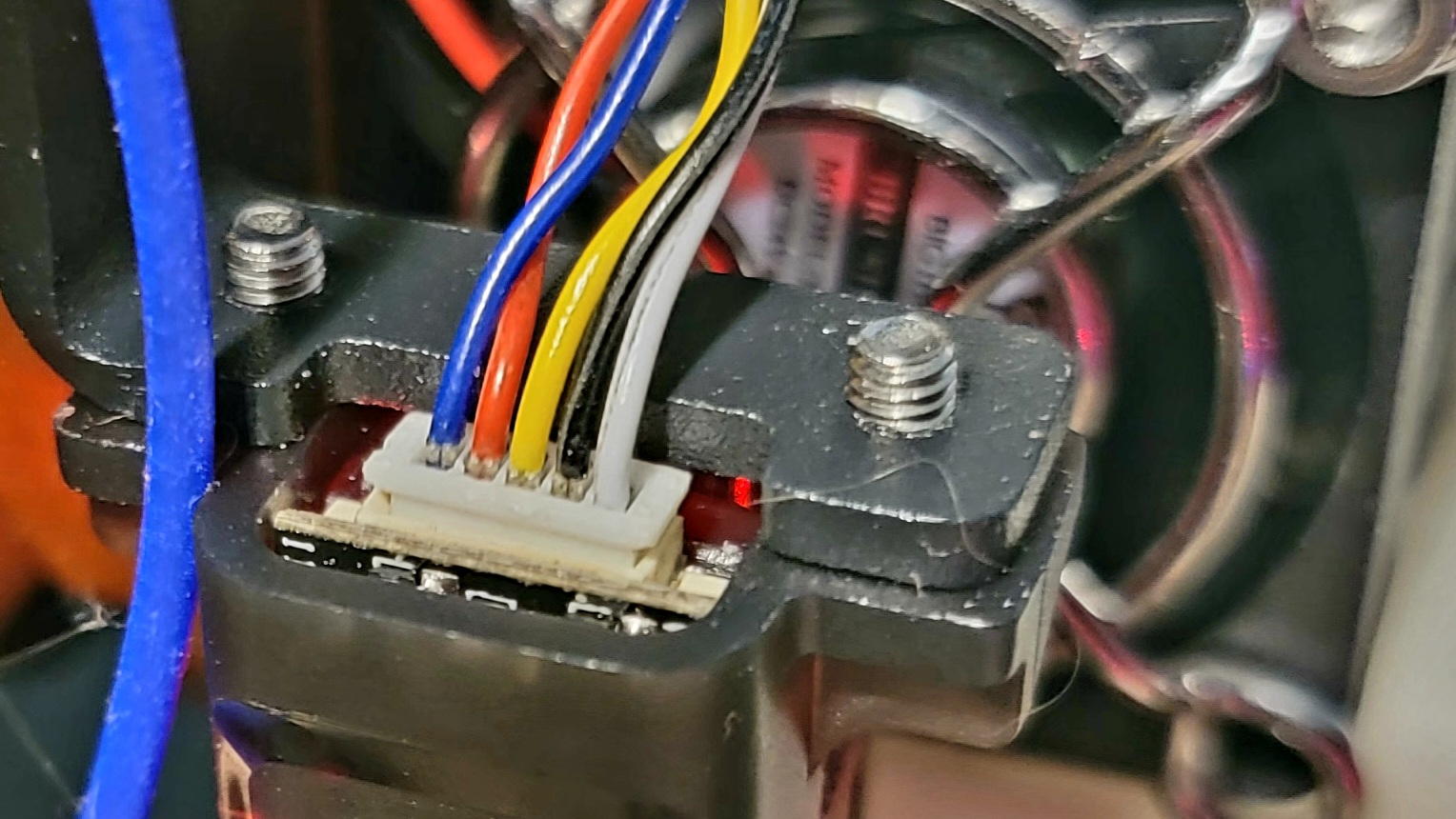
Wires coming out of the CR Touch
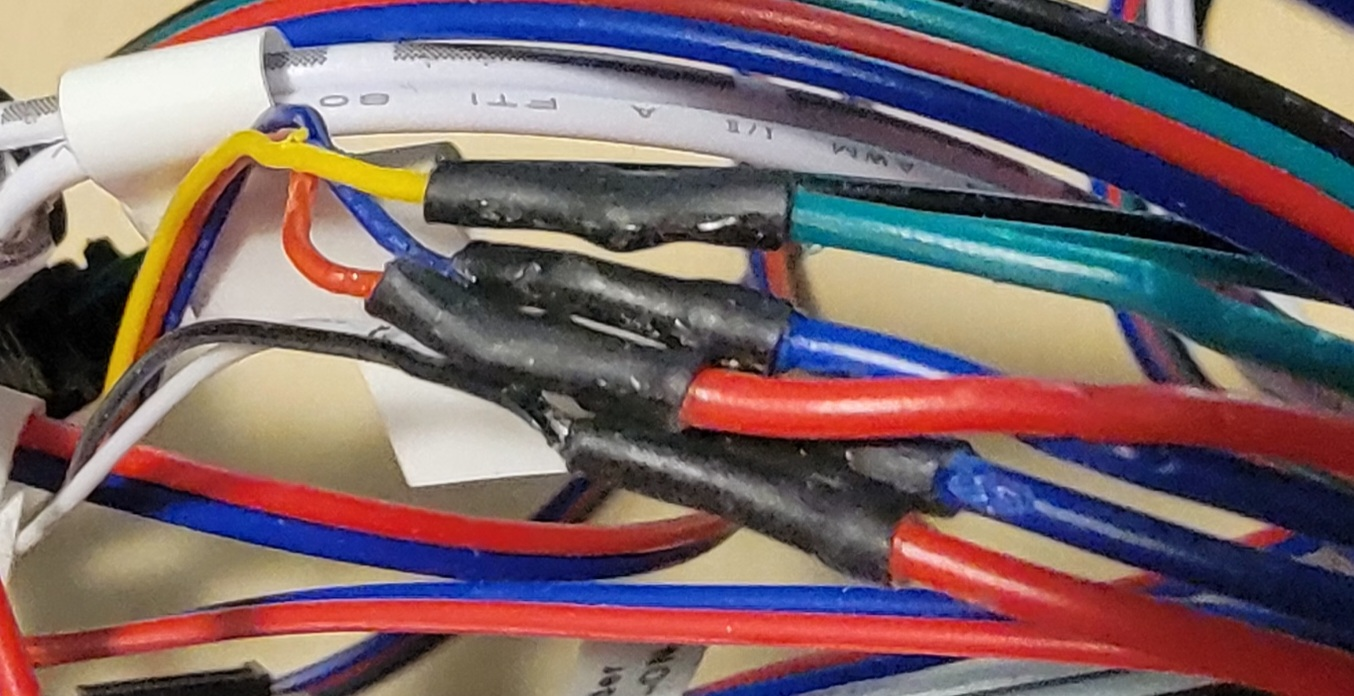
Wire extensions soldered on
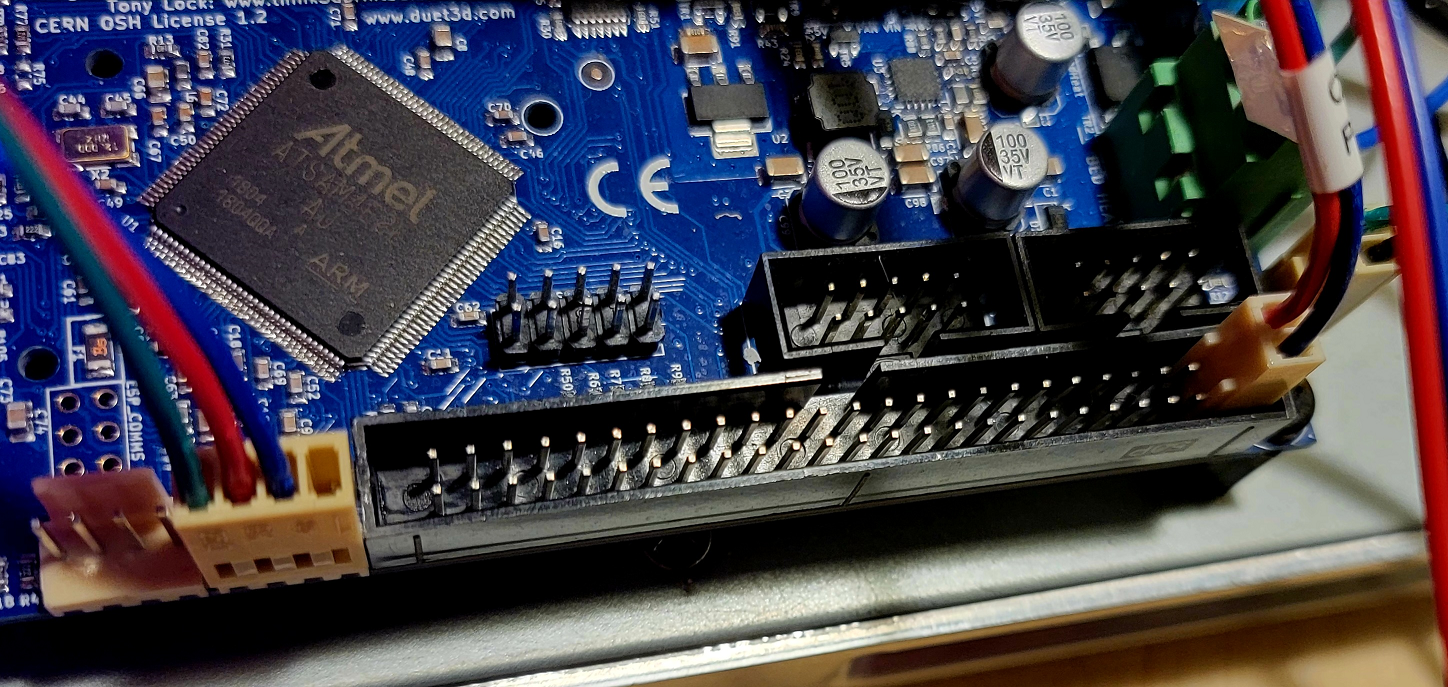
Connected to the board.
All connections ohmed out fine with no shorts.
I'm installing a CR Touch on a Tevo Tornado and am getting this error: G32 Error: Probe already triggered before probing move started.
I have it wired like this...
Config.g...
; Configuration file for Duet WiFi (firmware version 3.3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.3.10 on Tue May 10 2022 16:57:14 GMT-0400 (Eastern Daylight Time)
; General preferences
M575 P1 S1 B57600 ; enable support for PanelDue
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"TEVO" ; set printer name
; Network
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S1 ; enable Telnet
; Drives
M569 P0 S1 ; physical drive 0 goes forwards
M569 P1 S1 ; physical drive 1 goes forwards
M569 P2 S1 ; physical drive 2 goes forwards
M569 P3 S0 ; physical drive 3 goes forwards
M584 X0 Y1 Z2 E3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z400.00 E932.00 ; set steps per mm
M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2)
M906 X800 Y800 Z800 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X360 Y366 Z400 S0 ; set axis maxima
; Endstops
M574 X1 S1 P"!xstop" ; configure switch-type (e.g. microswitch) endstop for low end on X via pin !xstop
M574 Y1 S1 P"!ystop" ; configure switch-type (e.g. microswitch) endstop for low end on Y via pin !ystop
M574 Z1 S1 P"!zstop" ; configure switch-type (e.g. microswitch) endstop for low end on Z via pin !zstop
; Z-Probe
M558 P9 R0.4 C"zprobe.in+zprobe.mod" H5 F1200 T6000 ; set Z probe type to effector and the dive height + speeds
G31 P500 X0 Y0 Z2.5 ; set Z probe trigger value, offset and trigger height
M557 X15:285 Y15:285 S20 ; define mesh grid
; Heaters
;M308 S0 P"bedtemp" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin bedtemp
;M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0
;M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit
;M140 H0 ; map heated bed to heater 0
;M143 H0 S120 ; set temperature limit for heater 0 to 120C
;M308 S1 P"e0temp" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin e0temp
;M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1
;M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
;M143 H1 S280 ; set temperature limit for heater 1 to 280C
; Heaters V2
; Heaters
M308 S0 P"bedtemp" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin bedtemp
M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0
M307 H0 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S1 P"e0temp" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin e0temp
M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S280
; Fans
M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
; Tools
M563 P0 S"BiquH2" D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C
; Custom settings
M575 P1 S1 B57600
@dc42 Thanks! I am currently getting this error:
G32 Error: Probe already triggered before probing move started
I'm not even sure I have it wired correctly, but I think I do.  I'll check out that link in a bit and see if I can suss it out from there.
I'll check out that link in a bit and see if I can suss it out from there.
@fcwilt I'm having an issue with search on this forum. I'm trying to find how to set up the Crealty CR Touch and not coming up with much.
@fcwilt Thanks for the input. I tried copying code on my phone yesterday and the forum gave me an error. A friend suggested that I run m119 in the console and it showed the z stop as being off. I looked over the wiring this morning to discover that the z probe cable was plugged into the wrong spot on the Duet. Problem solved.
I am trying to suss out my Crealty CR Touch, but I'll start another thread on it when I'm ready for input.
X and y home fine. When I home z, Z0 does fine, while Z1 keeps clicking and bouncing.
code_text
; called to home all axes
;
; generated by RepRapFirmware Configuration Tool v3.3.10 on Sat Apr 23 2022 20:06:08 GMT-0400 (Eastern Daylight Time)
G91 ; relative positioning
G1 H2 Z5 F6000 ; lift Z relative to current position
G1 H1 X-365 Y-371 F1800 ; move quickly to X and Y axis endstops and stop there (first pass)
G1 H2 X5 Y5 F6000 ; go back a few mm
G1 H1 X-365 Y-371 F360 ; move slowly to X and Y axis endstops once more (second pass)
G1 H1 Z-405 F360 ; move Z down stopping at the endstop
G90 ; absolute positioning
G92 Z0 ; set Z position to axis minimum (you may want to adjust this)
; Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 Z5 F100 ; lift Z relative to current position
;G90 ; absolute positioning
; homex.g
; called to home the X axis
;
; generated by RepRapFirmware Configuration Tool v3.3.10 on Sat Apr 23 2022 20:06:08 GMT-0400 (Eastern Daylight Time)
G91 ; relative positioning
G1 H2 Z5 F6000 ; lift Z relative to current position
G1 H1 X-365 F1800 ; move quickly to X axis endstop and stop there (first pass)
G1 H2 X5 F6000 ; go back a few mm
G1 H1 X-365 F360 ; move slowly to X axis endstop once more (second pass)
G1 H2 Z-5 F6000 ; lower Z again
G90 ; absolute positioning
; homey.g
; called to home the Y axis
;
; generated by RepRapFirmware Configuration Tool v3.3.10 on Sat Apr 23 2022 20:06:08 GMT-0400 (Eastern Daylight Time)
G91 ; relative positioning
G1 H2 Z5 F6000 ; lift Z relative to current position
G1 H1 Y-371 F1800 ; move quickly to Y axis endstop and stop there (first pass)
G1 H2 Y5 F6000 ; go back a few mm
G1 H1 Y-371 F360 ; move slowly to Y axis endstop once more (second pass)
G1 H2 Z-5 F6000 ; lower Z again
G90 ; absolute positioning
; homez.g
; called to home the Z axis
;
; generated by RepRapFirmware Configuration Tool v3.3.10 on Sat Apr 23 2022 20:06:08 GMT-0400 (Eastern Daylight Time)
G91 ; relative positioning
G1 H2 Z5 F6000 ; lift Z relative to current position
G1 H1 Z-405 F1800 ; move Z down until the endstop is triggered
G92 Z0 ; set Z position to axis minimum (you may want to adjust this)
; Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 Z5 F100 ; lift Z relative to current position
;G90 ; absolute positioning```
code_text
@alankilian Thanks for the quick reply! I haven't tried to print yet, but I'm getting there. During homing, these guys move at a glacial pace.
[code]; Configuration file for Duet WiFi (firmware version 3.3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.3.10 on Sat Apr 23 2022 20:06:08 GMT-0400 (Eastern Daylight Time)
; General preferences
M575 P1 S1 B57600 ; enable support for PanelDue
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"TEVO" ; set printer name
; Network
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S1 ; enable Telnet
; Drives
M569 P0 S1 ; physical drive 0 goes forwards
M569 P1 S1 ; physical drive 1 goes forwards
M569 P2 S1 ; physical drive 2 goes forwards
M569 P3 S0 ; physical drive 3 goes backwards
M584 X0 Y1 Z2 E3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z400.00 E932.00 ; set steps per mm
M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2)
M906 X800 Y800 Z800 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X360 Y366 Z400 S0 ; set axis maxima
; Endstops
M574 X1 S1 P"!xstop" ; configure switch-type (e.g. microswitch) endstop for low end on X via pin !xstop
M574 Y1 S1 P"!ystop" ; configure switch-type (e.g. microswitch) endstop for low end on Y via pin !ystop
M574 Z1 S1 P"!zstop" ; configure switch-type (e.g. microswitch) endstop for low end on Z via pin !zstop
; Z-Probe
M558 P0 H5 F120 T6000 ; disable Z probe but set dive height, probe speed and travel speed
M557 X15:285 Y15:285 S20 ; define mesh grid
; Heaters
M308 S0 P"bedtemp" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin bedtemp
M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0
M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit
M307 H0 R0.515 K0.266:0.000 D18.04 E1.35 S1.00 B0
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S1 P"e0temp" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin e0temp
M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S280 ; set temperature limit for heater 1 to 280C
; Fans
M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
; Tools
M563 P0 S"BiquH2" D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C
; Custom settings
M575 P1 S1 B57600
[/code]