@Schmart and now fishing time.
Automount ready with M21 P1 in config.g and can choose for print sdcard0 or sdcard1 from 12864 editing main and create another listFiles, only 15 minutes of work.
@Schmart and now fishing time.
Automount ready with M21 P1 in config.g and can choose for print sdcard0 or sdcard1 from 12864 editing main and create another listFiles, only 15 minutes of work.
@Phaedrux my bad, now with M671 work fine so really thank you very much .
@oliof @dc42 thank you very much.
The problem is gnu arm eclipse is installed in program files due is 64 bits and gnu tools arm is in program files x86 due is 32 bits.
So I copy paste bin folder from the first one to the second one and bomm, rm and make is fine and compiled fine CoreNG, yeah.
@Phaedrux my bad, now with M671 work fine so really thank you very much .
Hello.
Downgraded to 3.1.1 and same happened.
RRF3 config:
; Configuration file for Duet WiFi (firmware version 3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v2.1.8 on Tue May 12 2020 19:42:32 GMT+0200 (hora de verano de Europa central)
; General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"X5S" ; set printer name
M667 S1 ; select CoreXY mode
; Network
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S1 ; enable FTP
M586 P2 S1 ; enable Telnet
; Drives
M569 P0 S0 ; Drive 0 goes backwards X
M569 P1 S0 ; Drive 1 goes backwards Y
M569 P2 S0 ; Drive 2 goes backwards Z
M569 P3 S0 ; Drive 3 goes backwards Z(2)
M569 P4 S1 ; Drive 4 goes fordwards E0
M569 P5 S1 ; Drive 5 goes fordwards E1
M584 X0 Y1 Z2:3 E4:5 P3 ; Map motors creating double Z and virtual Extruder
M350 X256 Y256 Z256 E16 I0 ; configure microstepping without interpolation
M92 X1280.00 Y1280.00 Z6400.00 E415.00 ; set steps per mm
M566 X900.00 Y900.00 Z12.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2)
M906 X1300 Y1300 Z1000 E550 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X330 Y330 Z400 S0 ; set axis maxima
; Endstops
M574 X1 S1 P"xstop" ; configure active-high endstop for low end on X via pin xstop
M574 Y1 S1 P"ystop" ; configure active-high endstop for low end on Y via pin ystop
M574 Z1 S1 P"!zstop+!e0stop" ; Z axis with two motors, individual min endstops, active low
; Z-Probe
M558 P9 C"^zprobe.in" H5 F120 T6000 A20 S0.03 ; BLTouch connected to Z probe IN pin
M950 S0 C"exp.heater4" ; create servo/gpio 0 on heater 4 pin on expansion connector
G31 P25 X0 Y0 Z2 ; Set Z probe trigger value, offset and trigger height
M557 X0:260 Y15:325 P6:6 ; Define mesh grid M557 X0:260 Y15:325
; Heaters
M308 S0 P"bedtemp" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin bedtemp
M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M307 H0 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M308 S1 P"e0temp" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin e0temp
M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1
M143 H1 S280 ; set temperature limit for heater 1 to 280C
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
; Fans
M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
M950 F1 C"fan1" Q500 ; create fan 1 on pin fan1 and set its frequency
M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on
; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C
; Custom settings are not defined
; Miscellaneous
M911 S20 R22 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss
M501 ; Enable volatile memory
;Enable 12864 fysetc
M918 P2
; Enable sdcar1 at boot
M21 P1
RRF2 config:
; Configuration file for Duet WiFi (firmware version 1.21)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool on Sun Sep 16 2018 16:54:23 GMT+0200 (hora de verano de Europa central)
; General preferences
G90 ; Send absolute coordinates...
M83 ; ...but relative extruder moves
M667 S1 ; Select CoreXY mode
; Network
M550 PX5S
M552 S1
M552 P192.168.0.18 ; Set IP and Enable network
M553 P255.255.255.0 ; Set Netmask
M554 P192.168.0.1 ; Set Gateway
M586 P0 S1 ; Enable HTTP
M586 P1 S1 ; Enable FTP
M586 P2 S1 ; Enable Telnet
; Drives
M569 P0 S0 ; Drive 0 goes backwards X
M569 P1 S0 ; Drive 1 goes backwards Y
M569 P2 S0 ; Drive 2 goes backwards Z
M569 P3 S0 ; Drive 3 goes backwards Z(U)
M569 P4 S1 ; Drive 4 goes fordwards E0
M569 P5 S1 ; Drive 5 goes fordwards E1
M584 X0 Y1 Z2:3 U3 E4:5 P3 ; Map motors creating virtual Z and virtual Extruder
;M671 X0:265 Y150:150 S2 ; Leadscrews at left and right of X axis, centered on Y axis
M350 X256 Y256 Z256 U256 E16:16 I0 ; Configure microstepping with interpolation
M92 X1280 Y1280 Z6400 U6400 E415:415 ; Set steps per mm
M566 X300 Y300 Z24 U24 E300:300 P1 ; Set maximum instantaneous speed changes (mm/min)
M203 X5000 Y5000 Z800 U800 E1200:1200 ; Set maximum speeds (mm/min)
M201 X300 Y300 Z250 U120 E250:250 ; Set accelerations (mm/s^2)
M906 X1300 Y1300 Z1000 U1000 E550:550 I30 ; Set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
; Axis Limits
M208 X0 Y0 Z-5 U-5 S1 ; Set axis minima
M208 X330 Y330 Z400 U400 S0 ; Set axis maxima
; Endstops
M574 X1 S1
M574 Y1 S1
M574 Z1 S0
M574 U1 S0
; Z-Probe
;M574 Z1 S2 ; Set endstops controlled by probe
M307 H4 A-1 C-1 D-1 ; Disable heater on PWM channel for BLTouch
M558 P9 H5 F120 T6000 A20 S0.03 ; Set Z probe type to bltouch and the dive height + speeds
G31 P25 X0 Y0 Z2 ; Set Z probe trigger value, offset and trigger height
M557 X0:260 Y15:325 P6:6 ; Define mesh grid M557 X60:300 Y0:320
; Heaters
M305 S"Bed" P0 T100000 B3950 R4700 ; Set thermistor + ADC parameters for heater 0
M143 H0 S120 ; Set temperature limit for heater 0 to 120C
M305 s"Hotend1" P1 T100000 B3950 R4700 ; Set thermistor + ADC parameters for heater 1
M143 H1 S280 ; Set temperature limit for heater 1 to 280C
M305 s"Hotend2" P2 T100000 B3950 R4700 ; Set thermistor + ADC parameters for heater 2
M143 H1 S280 ; Set temperature limit for heater 1 to 280C
; Fans
M106 P0 S0 I0 F500 H-1 C"Layer Fan" ; Set fan 0 value, PWM signal inversion and frequency. Thermostatic control is turned off(capa)
M106 P1 S1 I0 F500 H1 T45 ; Set fan 1 value, PWM signal inversion and frequency. Thermostatic control is turned on(hotend)
M106 P2 I1 T35:65 H100:101:102 L0.3 F25000 S0.3 C"Duet Fan" ; Duet Fan
;M106 P2 S1 I0 F500 H1 T175 ; Set fan 1 value, PWM signal inversion and frequency. Thermostatic control is turned on(fan_TMC2208)
; Tools
M563 P0 D0 H1 F0 ; Define tool 0( Related to hotbed )
G10 P0 X0 Y0 Z0 ; Set tool 0 axis offsets
G10 P0 R0 S0 ; Set initial tool 0 active and standby temperatures to 0C
; Automatic power saving
;M911 S21.5 R22.0 P"M83 E-2.5 F3000" ; Set voltage thresholds and actions to run on power loss
;Lineas para recuperar impresión
;M32 "BorrarAutoimpresion.gco" ; Si hay un gcode para borrar la reanudación, lo ejecuta.
;G4 P2000 ; Esperamos 2 segundos
;M30 "BorrarAutoimpresion.gco" ; Si hay un gcode para borrar la reanudación, se borra.
;M98 P"0:/macros/Reanudar Imp" ; Se lanza la macro de reanudación de impresión. Si existe, la pondrá en marcha.
; Miscellaneous
M501 ; Load saved parameters from non-volatile memory
Output M98:
M98 P"config.g"
HTTP is enabled on port 80
FTP is enabled on port 21
TELNET is enabled on port 23
Warning: Heater 0 appears to be over-powered. If left on at full power, its temperature is predicted to reach 365C
SDHC card mounted in slot 1, capacity 8.06Gb
Hello, in rrf2 Im using this G32 for calibrate the bed leadscrews in my corexy printer, but now in rrf3 3.2beta4 is impossible always report Error: Probe points P0 to P1 must be in clockwise order starting near minimum X and Y. I try different options but always report this error.
G28
G30 P0 X5 Y165 S1 Z-99999 ; toma datos en el primer eje y los almacena
G30 P1 X260 Y165 S2 Z-99999 ; toma datos en el segundo eje y hace la media y nivela.
This is the bed.g file, with bltouch, duetfiwi standalone.
Thank you.
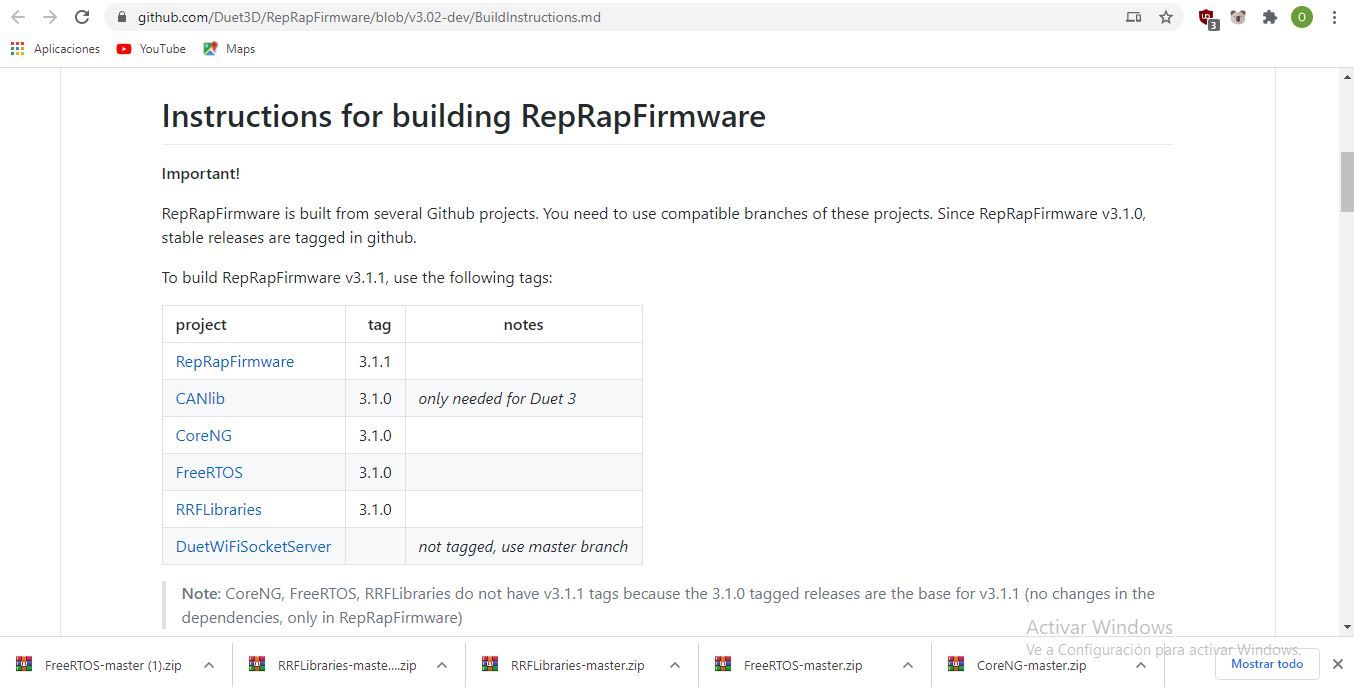
@dc42 no problem, I know you are bussy and the delay is good for me because I learn to compile the firmware with less motors active, see the final of this topic:
https://forum.duet3d.com/topic/19980/little-help-to-build-rrf3/11
Thank you very much.
Finally compiled latest version 3.2beta3.2 with only 5 motors active so great for me after few days, thank you @oliof and @dc42
Nevermind finally compiled latest version fine.
@Garth_42 Im glad if my topic help you because @oliof is great and wonderfull.
I think I have my solution near...will see
Can you share your downloaded CoreNG, FreeRTOS, RRFLibraries, duetwifisocket and Reprapfirmware?
Yo check if my problem is my environnment or files
Thank you
@dc42 I use this files:
Changed toFreeRTOS dev branch all compiled and clean before compile Reprapfirmware and same errors.
This is my build configuration of all projects:
CoreNG SAM4E8E
FreeRTOS SAM4E
RRFLibraries SAM4E_RTOS
Reprapfirmware Duet2_RTOS
Are fine RRFLibraries and Reprapfirmware with RTOS added?
Thank you
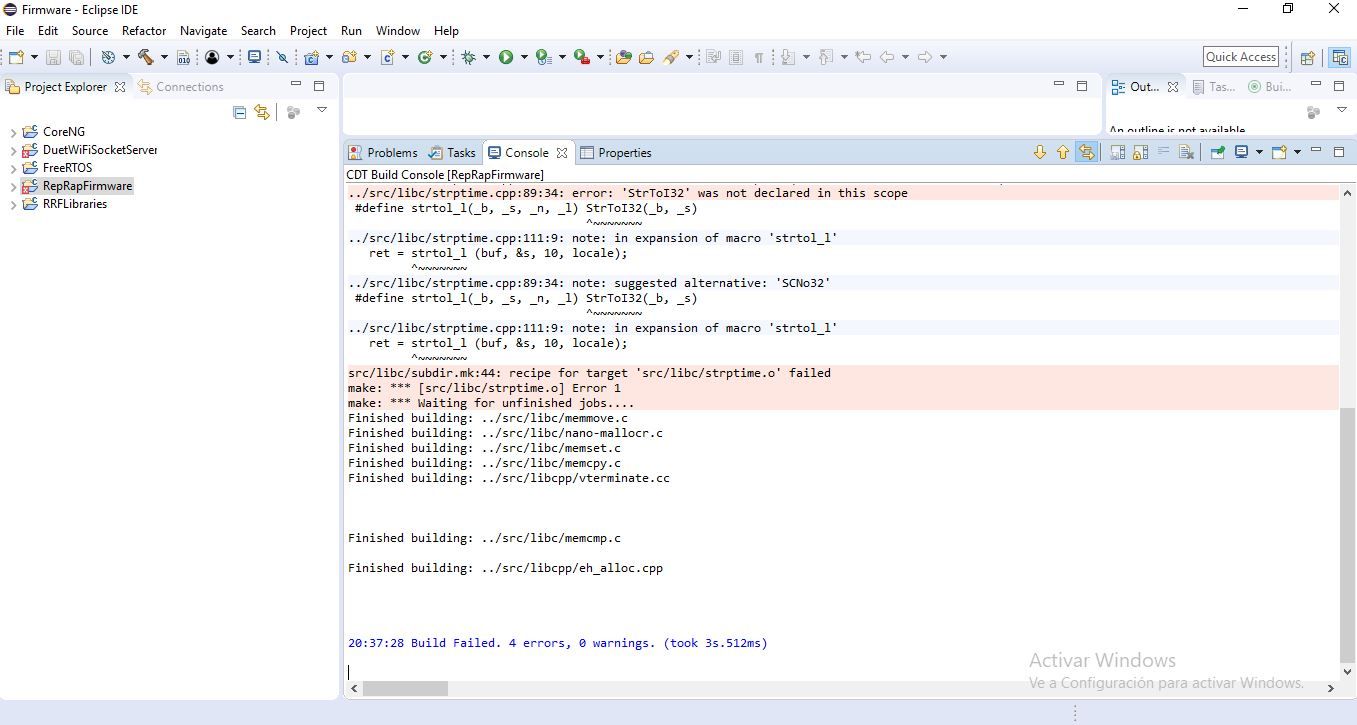
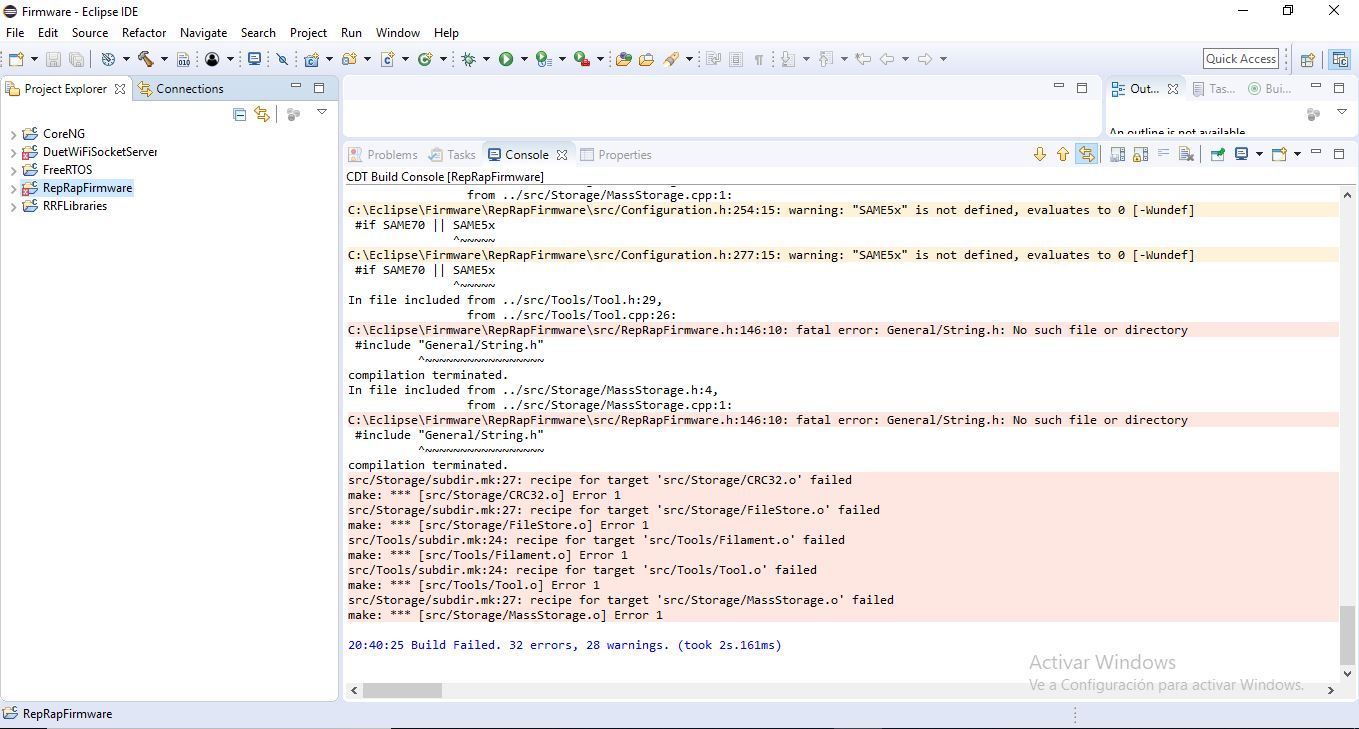
@oliof all your instructions done with 3.1.1. but no luck errors appear with right build configurations checked in buildinstructions and clean projects before compile Reprapfirmware.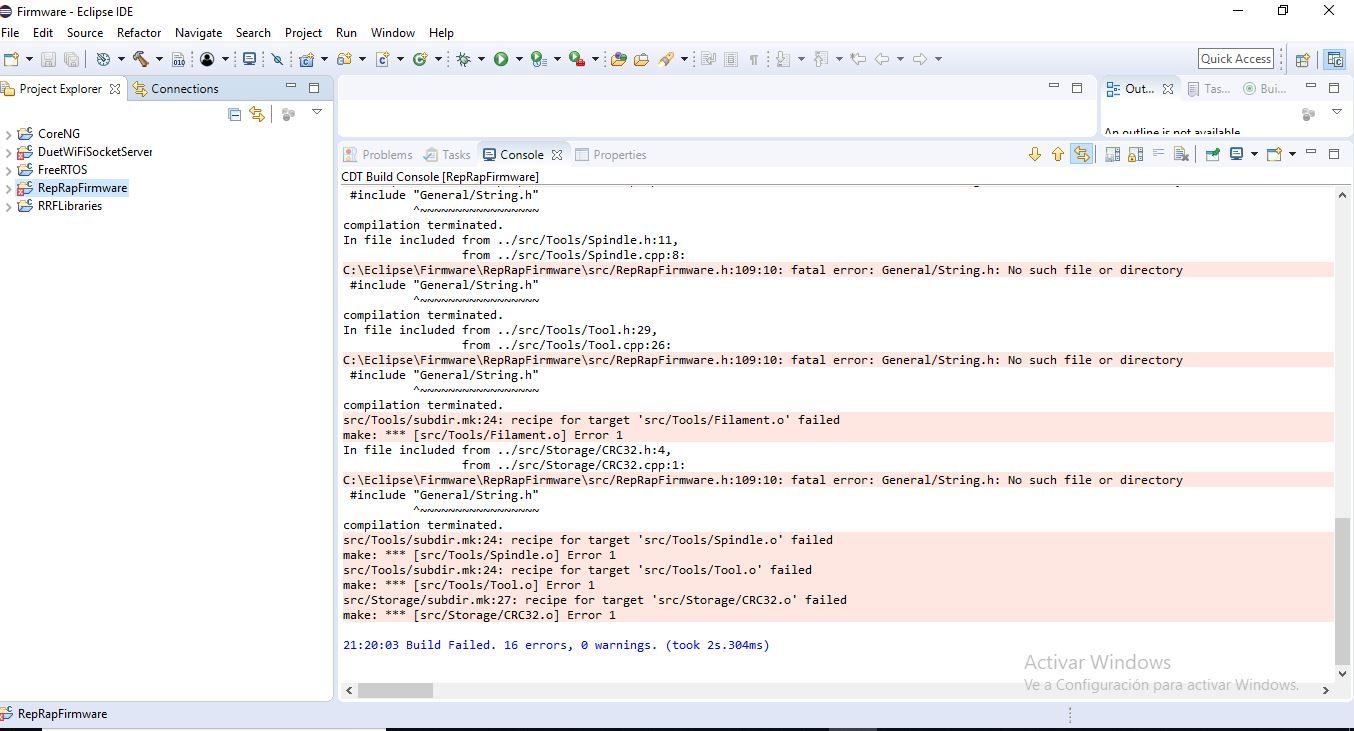
Compile 2.05 branch fine but 3.2beta3.2 have errors and dont compile.