@droftarts
I just plugged the servo, and it works!
Thank you for the support!
@droftarts
I just plugged the servo, and it works!
Thank you for the support!
@jay_s_uk
M115
FIRMWARE_NAME: RepRapFirmware for Duet 3 MB6HC FIRMWARE_VERSION: 3.5.0-rc.1++ ELECTRONICS: Duet 3 MB6HC v1.02 or later FIRMWARE_DATE: 2023-12-07 12:53:53
@droftarts said in Parsing error when loading height map:
axis0,axis1,min0,max0,min1,max1,radius,spacing0,spacing1,num0,num1 X,Y,0.00,17000.00,0.00,9000.00,-1.00,100.00,100.00,18,10You have changed the axis length from 1700mm to 17000mm, and 900mm to 9000mm?! Also, you only have 17 points for each line of the probe data; you need 18 to go to from 0 (the first point) to 1700 (the 18th and last point) in 100mm steps.
Ian
Damn it, I change things to quick and then I fuck it up, sorry!
It works now! The main issues was the missing 18th column in the grid..
I feel stupid and happy haha, thank you for your help and patience!
To anybody reading this in the future, here is the .csv file that ended up working:
RepRapFirmware height map file v2
axis0,axis1,min0,max0,min1,max1,radius,spacing0,spacing1,num0,num1
X,Y,0.00,1700.00,0.00,900.00,-1.00,100.00,100.00,18,10
0.600, 0.500, 0.400, 0.400, 0.400, 0.400, 0.400, 0.300, 0.300, 0.400, 0.400, 0.500, 0.500, 0.600, 0.700, 0.900, 1.100, 1.100
0.400, 0.400, 0.300, 0.300, 0.200, 0.200, 0.200, 0.200, 0.200, 0.200, 0.300, 0.350, 0.450, 0.500, 0.700, 0.800, 1.050, 1.050
0.300, 0.200, 0.200, 0.100, 0.100, 0.100, 0.050, 0.000, 0.000, 0.000, 0.100, 0.200, 0.300, 0.450, 0.600, 0.800, 1.000, 1.000
0.200, 0.100, 0.000, -0.100, -0.100, -0.100, -0.150, -0.200, -0.200, -0.200, -0.100, -0.100, 0.150, 0.280, 0.450, 0.680, 0.900, 0.900
0.100, 0.000, -0.100, -0.200, -0.200, -0.300, -0.300, -0.300, -0.220, -0.220, -0.180, -0.050, 0.020, 0.180, 0.400, 0.600, 0.900, 0.900
0.100, 0.000, -0.100, -0.200, -0.300, -0.400, -0.400, -0.400, -0.300, -0.300, -0.200, -0.150, -0.100, 0.000, 0.280, 0.500, 0.800, 0.800
0.100, 0.000, -0.150, -0.280, -0.400, -0.450, -0.400, -0.400, -0.200, -0.250, -0.200, -0.200, -0.050, 0.160, 0.400, 0.700, 0.700, 0.700
0.180, -0.050, -0.200, -0.300, -0.400, -0.400, -0.400, -0.400, -0.400, -0.350, -0.300, -0.250, -0.150, 0.050, 0.300, 0.600, 0.900, 0.900
0.100, -0.100, -0.200, -0.300, -0.400, -0.400, -0.400, -0.400, -0.380, -0.350, -0.280, -0.200, -0.200, 0.080, 0.250, 0.600, 0.900, 0.900
0.100, -0.100, -0.280, -0.380, -0.400, -0.440, -0.400, -0.400, -0.380, -0.350, -0.300, -0.280, -0.200, 0.000, 0.200, 0.550, 0.900, 0.900
@droftarts said in Parsing error when loading height map:
axis0,axis1,min0,max0,min1,max1,radius,spacing0,spacing1,num0,num1 X,Y,0.00,17000.00,0.00,9000.00,-1.00,100.00,100.00,18,10You have changed the axis length from 1700mm to 17000mm, and 900mm to 9000mm?! Also, you only have 17 points for each line of the probe data; you need 18 to go to from 0 (the first point) to 1700 (the 18th and last point) in 100mm steps.
Ian
Damn it, I change things to quick and then I fuck it up, sorry!
It works now! The main issues was the missing 18th column in the grid..
I feel stupid and happy haha, thank you for your help and patience!
To anybody reading this in the future, here is the .csv file that ended up working:
RepRapFirmware height map file v2
axis0,axis1,min0,max0,min1,max1,radius,spacing0,spacing1,num0,num1
X,Y,0.00,1700.00,0.00,900.00,-1.00,100.00,100.00,18,10
0.600, 0.500, 0.400, 0.400, 0.400, 0.400, 0.400, 0.300, 0.300, 0.400, 0.400, 0.500, 0.500, 0.600, 0.700, 0.900, 1.100, 1.100
0.400, 0.400, 0.300, 0.300, 0.200, 0.200, 0.200, 0.200, 0.200, 0.200, 0.300, 0.350, 0.450, 0.500, 0.700, 0.800, 1.050, 1.050
0.300, 0.200, 0.200, 0.100, 0.100, 0.100, 0.050, 0.000, 0.000, 0.000, 0.100, 0.200, 0.300, 0.450, 0.600, 0.800, 1.000, 1.000
0.200, 0.100, 0.000, -0.100, -0.100, -0.100, -0.150, -0.200, -0.200, -0.200, -0.100, -0.100, 0.150, 0.280, 0.450, 0.680, 0.900, 0.900
0.100, 0.000, -0.100, -0.200, -0.200, -0.300, -0.300, -0.300, -0.220, -0.220, -0.180, -0.050, 0.020, 0.180, 0.400, 0.600, 0.900, 0.900
0.100, 0.000, -0.100, -0.200, -0.300, -0.400, -0.400, -0.400, -0.300, -0.300, -0.200, -0.150, -0.100, 0.000, 0.280, 0.500, 0.800, 0.800
0.100, 0.000, -0.150, -0.280, -0.400, -0.450, -0.400, -0.400, -0.200, -0.250, -0.200, -0.200, -0.050, 0.160, 0.400, 0.700, 0.700, 0.700
0.180, -0.050, -0.200, -0.300, -0.400, -0.400, -0.400, -0.400, -0.400, -0.350, -0.300, -0.250, -0.150, 0.050, 0.300, 0.600, 0.900, 0.900
0.100, -0.100, -0.200, -0.300, -0.400, -0.400, -0.400, -0.400, -0.380, -0.350, -0.280, -0.200, -0.200, 0.080, 0.250, 0.600, 0.900, 0.900
0.100, -0.100, -0.280, -0.380, -0.400, -0.440, -0.400, -0.400, -0.380, -0.350, -0.300, -0.280, -0.200, 0.000, 0.200, 0.550, 0.900, 0.900
@droftarts said in Parsing error when loading height map:
@sbNielsen Did you update your firmware from the old release candidate (3.5.0-rc.1++) you are currently running?
Ian
Updated firmware to latest, still getting the error messages described above
Ah yes, you are right!
I corrected the mistakes you pointed out:
RepRapFirmware height map file v2
axis0,axis1,min0,max0,min1,max1,radius,spacing0,spacing1,num0,num1
X,Y,0.00,17000.00,0.00,9000.00,-1.00,100.00,100.00,18,10
0.600, 0.500, 0.400, 0.400, 0.400, 0.400, 0.400, 0.300, 0.300, 0.400, 0.400, 0.500, 0.500, 0.600, 0.700, 0.900, 1.100
0.400, 0.400, 0.300, 0.300, 0.200, 0.200, 0.200, 0.200, 0.200, 0.200, 0.300, 0.350, 0.450, 0.500, 0.700, 0.800, 1.050
0.300, 0.200, 0.200, 0.100, 0.100, 0.100, 0.050, 0.000, 0.000, 0.000, 0.100, 0.200, 0.300, 0.450, 0.600, 0.800, 1.000
0.200, 0.100, 0.000, -0.100, -0.100, -0.100, -0.150, -0.200, -0.200, -0.200, -0.100, -0.100, 0.150, 0.280, 0.450, 0.680, 0.900
0.100, 0.000, -0.100, -0.200, -0.200, -0.300, -0.300, -0.300, -0.220, -0.220, -0.180, -0.050, 0.020, 0.180, 0.400, 0.600, 0.900
0.100, 0.000, -0.100, -0.200, -0.300, -0.400, -0.400, -0.400, -0.300, -0.300, -0.200, -0.150, -0.100, 0.000, 0.280, 0.500, 0.800
0.100, 0.000, -0.150, -0.280, -0.400, -0.450, -0.400, -0.400, -0.200, -0.250, -0.200, -0.200, -0.050, 0.160, 0.400, 0.700, 0.700
0.180, -0.050, -0.200, -0.300, -0.400, -0.400, -0.400, -0.400, -0.400, -0.350, -0.300, -0.250, -0.150, 0.050, 0.300, 0.600, 0.900
0.100, -0.100, -0.200, -0.300, -0.400, -0.400, -0.400, -0.400, -0.380, -0.350, -0.280, -0.200, -0.200, 0.080, 0.250, 0.600, 0.900
0.100, -0.100, -0.280, -0.380, -0.400, -0.440, -0.400, -0.400, -0.380, -0.350, -0.300, -0.280, -0.200, 0.000, 0.200, 0.550, 0.900
Now i get this error message:
Error: G29: Failed to load height map from file 0:/sys/heightmap.csv: number expected at line 3 column 136
If i flip the num0, num1 values around so num0=10 and num1=18 I get this error:
Error: G29: Failed to load height map from file 0:/sys/heightmap.csv: failed to read line from file
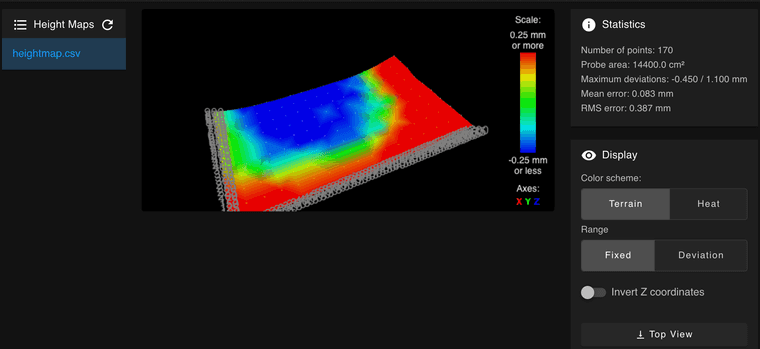
Strange, even though I get the error message, that it failed to load, I can still preview the map in the 'height map' tab.
And it corresponds correctly with the coordinates and the expected value.
Does that mean that it is loaded anyway or?
RepRapFirmware height map file v2 generated at 2024-16-07 19:04, min error -0.45, max error 1.10, mean 0.083, deviation 0.387
axis0,axis1,min0,max0,min1,max1,radius,spacing0,spacing1,num0,num1
X,Y,0.00,1700.00,0.00,900.00,,10.00,10.00,17,10
0.600, 0.500, 0.400, 0.400, 0.400, 0.400, 0.400, 0.300, 0.300, 0.400, 0.400, 0.500, 0.500, 0.600, 0.700, 0.900, 1.100
0.400, 0.400, 0.300, 0.300, 0.200, 0.200, 0.200, 0.200, 0.200, 0.200, 0.300, 0.350, 0.450, 0.500, 0.700, 0.800, 1.050
0.300, 0.200, 0.200, 0.100, 0.100, 0.100, 0.050, 0.000, 0.000, 0.000, 0.100, 0.200, 0.300, 0.450, 0.600, 0.800, 1.000
0.200, 0.100, 0.000, -0.100, -0.100, -0.100, -0.150, -0.200, -0.200, -0.200, -0.100, -0.100, 0.150, 0.280, 0.450, 0.680, 0.900
0.100, 0.000, -0.100, -0.200, -0.200, -0.300, -0.300, -0.300, -0.220, -0.220, -0.180, -0.050, 0.020, 0.180, 0.400, 0.600, 0.900
0.100, 0.000, -0.100, -0.200, -0.300, -0.400, -0.400, -0.400, -0.300, -0.300, -0.200, -0.150, -0.100, 0.000, 0.280, 0.500, 0.800
0.100, 0.000, -0.150, -0.280, -0.400, -0.450, -0.400, -0.400, -0.200, -0.250, -0.200, -0.200, -0.050, 0.160, 0.400, 0.700, 0.700
0.180, -0.050, -0.200, -0.300, -0.400, -0.400, -0.400, -0.400, -0.400, -0.350, -0.300, -0.250, -0.150, 0.050, 0.300, 0.600, 0.900
0.100, -0.100, -0.200, -0.300, -0.400, -0.400, -0.400, -0.400, -0.380, -0.350, -0.280, -0.200, -0.200, 0.080, 0.250, 0.600, 0.900
0.100, -0.100, -0.280, -0.380, -0.400, -0.440, -0.400, -0.400, -0.380, -0.350, -0.300, -0.280, -0.200, 0.000, 0.200, 0.550, 0.900
I have a difficult time spotting any differences in syntax/structure between mine (above) and the example i posted before, but somehow my map will not load, and the other one will.
With ^ this map i still get the
Error: G29: Failed to load height map from file 0:/sys/heightmap.csv: failed to parse grid parameters
Just tried to load this height map instead and it works!
What is the issue, with the syntax on the first 3 lines or?
RepRapFirmware height map file v2 generated at 2024-05-08 10:04, min error -0.135, max error 0.460, mean 0.168, deviation 0.111
axis0,axis1,min0,max0,min1,max1,radius,spacing0,spacing1,num0,num1
X,Y,20.00,280.00,10.00,170.00,-1.00,10.00,10.00,27,17
-0.046, -0.129, -0.088, -0.023, -0.013, -0.061, -0.062, -0.036, -0.009, -0.010, 0.011, 0.006, -0.049, 0.000, -0.051, 0.024, 0.006, 0.026, 0.024, 0.091, 0.102, 0.126, 0.159, 0.142, 0.083, 0.093, 0.132
-0.135, -0.086, -0.059, -0.026, 0.021, 0.012, -0.022, 0.003, -0.030, 0.058, 0.013, -0.020, 0.031, 0.044, -0.028, 0.023, 0.052, 0.110, 0.098, 0.109, 0.132, 0.116, 0.193, 0.161, 0.160, 0.094, 0.074
-0.114, -0.070, -0.028, -0.012, -0.046, -0.019, 0.051, -0.029, 0.014, -0.001, 0.048, -0.011, 0.036, -0.002, 0.040, 0.029, 0.132, 0.151, 0.151, 0.141, 0.112, 0.153, 0.150, 0.190, 0.143, 0.202, 0.154
-0.040, -0.021, -0.006, -0.014, -0.040, 0.046, 0.049, 0.111, 0.048, 0.051, 0.106, 0.104, 0.033, 0.036, 0.111, 0.106, 0.065, 0.161, 0.118, 0.161, 0.184, 0.214, 0.138, 0.166, 0.166, 0.176, 0.158
-0.058, -0.028, -0.001, 0.039, 0.039, 0.051, 0.061, 0.074, 0.072, 0.073, 0.069, 0.051, 0.071, 0.126, 0.109, 0.156, 0.176, 0.138, 0.140, 0.220, 0.231, 0.171, 0.171, 0.218, 0.201, 0.220, 0.168
0.012, -0.027, 0.011, 0.112, 0.112, 0.093, 0.044, 0.083, 0.078, 0.101, 0.082, 0.080, 0.084, 0.162, 0.144, 0.100, 0.139, 0.232, 0.137, 0.232, 0.220, 0.234, 0.238, 0.198, 0.257, 0.193, 0.234
0.001, 0.029, 0.067, 0.060, 0.048, 0.082, 0.139, 0.127, 0.167, 0.138, 0.130, 0.122, 0.145, 0.089, 0.121, 0.156, 0.198, 0.243, 0.201, 0.199, 0.241, 0.189, 0.221, 0.270, 0.312, 0.228, 0.235
-0.009, 0.063, 0.076, 0.087, 0.118, 0.089, 0.038, 0.129, 0.115, 0.146, 0.164, 0.121, 0.139, 0.120, 0.131, 0.107, 0.178, 0.206, 0.279, 0.285, 0.242, 0.260, 0.217, 0.220, 0.281, 0.244, 0.165
-0.003, 0.086, 0.085, 0.126, 0.111, 0.141, 0.139, 0.126, 0.150, 0.138, 0.178, 0.152, 0.170, 0.094, 0.118, 0.181, 0.200, 0.250, 0.231, 0.277, 0.313, 0.225, 0.316, 0.297, 0.251, 0.249, 0.213
0.011, 0.029, 0.094, 0.125, 0.139, 0.153, 0.166, 0.139, 0.132, 0.171, 0.199, 0.189, 0.137, 0.119, 0.153, 0.172, 0.238, 0.246, 0.252, 0.297, 0.256, 0.281, 0.306, 0.270, 0.244, 0.197, 0.227
0.045, 0.082, 0.107, 0.089, 0.159, 0.132, 0.184, 0.182, 0.213, 0.195, 0.196, 0.197, 0.198, 0.166, 0.226, 0.224, 0.278, 0.230, 0.212, 0.243, 0.298, 0.322, 0.293, 0.265, 0.273, 0.221, 0.191
0.069, 0.043, 0.041, 0.181, 0.133, 0.142, 0.202, 0.229, 0.225, 0.225, 0.228, 0.220, 0.146, 0.157, 0.201, 0.229, 0.199, 0.317, 0.292, 0.292, 0.272, 0.311, 0.319, 0.321, 0.262, 0.236, 0.248
0.044, 0.066, 0.070, 0.140, 0.167, 0.197, 0.251, 0.256, 0.241, 0.199, 0.191, 0.218, 0.224, 0.166, 0.195, 0.251, 0.251, 0.241, 0.252, 0.256, 0.317, 0.314, 0.329, 0.366, 0.337, 0.326, 0.269
0.072, 0.124, 0.104, 0.149, 0.144, 0.226, 0.301, 0.221, 0.224, 0.242, 0.206, 0.260, 0.197, 0.242, 0.240, 0.287, 0.242, 0.292, 0.341, 0.299, 0.300, 0.274, 0.324, 0.339, 0.304, 0.302, 0.314
0.122, 0.185, 0.169, 0.196, 0.242, 0.248, 0.262, 0.255, 0.252, 0.215, 0.266, 0.221, 0.259, 0.301, 0.304, 0.233, 0.297, 0.289, 0.316, 0.294, 0.340, 0.308, 0.386, 0.324, 0.319, 0.351, 0.298
0.118, 0.187, 0.199, 0.243, 0.256, 0.259, 0.267, 0.306, 0.271, 0.243, 0.245, 0.274, 0.304, 0.293, 0.279, 0.258, 0.295, 0.304, 0.324, 0.319, 0.348, 0.407, 0.345, 0.364, 0.338, 0.317, 0.326
0.146, 0.183, 0.242, 0.186, 0.262, 0.319, 0.326, 0.330, 0.350, 0.259, 0.333, 0.272, 0.251, 0.271, 0.269, 0.269, 0.281, 0.344, 0.326, 0.339, 0.312, 0.460, 0.377, 0.400, 0.390, 0.313, 0.337
@jay_s_uk
M115
FIRMWARE_NAME: RepRapFirmware for Duet 3 MB6HC FIRMWARE_VERSION: 3.5.0-rc.1++ ELECTRONICS: Duet 3 MB6HC v1.02 or later FIRMWARE_DATE: 2023-12-07 12:53:53
I am trying to load a height map into Duet web control, but i get the following error when running G29 S1
"Error: G29: Failed to load height map from file 0:/sys/heightmap.csv: failed to parse grid parameters"
Context:
The printer doesn't have a probe so I made the height map measurements manually and plotted them into the .csv file. The syntax should be correct, and I can't find a typo or anything that should interfere.
The height map:
heightmap.csv
or here:
RepRapFirmware height map file v2
xmin,xmax,ymin,ymax,radius,spacing,xnum,ynum
0,1700,0,900,,10,17,10
0.60,0.50,0.40,0.40,0.40,0.40,0.40,0.30,0.30,0.40,0.40,0.50,0.50,0.60,0.70,0.90,1.10
0.40,0.40,0.30,0.30,0.20,0.20,0.20,0.20,0.20,0.20,0.30,0.35,0.45,0.50,0.70,0.80,1.05
0.30,0.20,0.20,0.10,0.10,0.10,0.05,0.00,0.00,0.00,0.10,0.20,0.30,0.45,0.60,0.80,1.00
0.20,0.10,0.00,-0.10,-0.10,-0.10,-0.15,-0.20,-0.20,-0.20,-0.10,-0.10,0.15,0.28,0.45,0.68,0.90
0.10,0.00,-0.10,-0.20,-0.20,-0.30,-0.30,-0.30,-0.22,-0.22,-0.18,-0.05,0.02,0.18,0.40,0.60,0.90
0.10,0.00,-0.10,-0.20,-0.30,-0.40,-0.40,-0.40,-0.30,-0.30,-0.20,-0.15,-0.10,0.00,0.28,0.50,0.80
0.10,0.00,-0.15,-0.28,-0.40,-0.45,-0.40,-0.40,-0.20,-0.25,-0.20,-0.20,-0.05,0.16,0.40,0.70,0.70
0.18,-0.05,-0.20,-0.30,-0.40,-0.40,-0.40,-0.40,-0.40,-0.35,-0.30,-0.25,-0.15,0.05,0.30,0.60,0.90
0.10,-0.10,-0.20,-0.30,-0.40,-0.40,-0.40,-0.40,-0.38,-0.35,-0.28,-0.20,-0.20,0.08,0.25,0.60,0.90
0.10,-0.10,-0.28,-0.38,-0.40,-0.44,-0.40,-0.40,-0.38,-0.35,-0.30,-0.28,-0.20,0.00,0.20,0.55,0.90
Hope there is something I'm missing; anyone see something wrong here?
Thank you,
Søren
Hello everyone.
I have a large format pellet extruder installed on my printer, and I just had an incident where I accidentally pressed the 'Retract' button in DWC instead of the 'Extrude' button.
I didn't realize immediately, so it brought molten material to rise up into the cooled zone of the barrel and solidify, jamming the extruder.
I had to take the extruder apart to clear the jam, so to avoid this happening again, is there a way for me to remove the 'Retract' button entirely from the DWC?
Looking forward to hear,
Søren