Any pointers as to where to look next? I double checked the wiring and the specs for the encoders. Everything seems to be in order.
Posts made by MiniFireDragon
-
RE: 1HCL Closed Loop problems and a questionposted in Duet Hardware and wiring
-
RE: 1HCL Closed Loop problems and a questionposted in Duet Hardware and wiring
Not sure what I did, but I did the code
M569 P52.0 D4 M569.6 P52.0 V1And again, I got:
Error: M569.6: Driver 52.0 basic tuning failed, the measured motion was inconsistent Warning: Driver 52.0 warning: tuning/calibration failedInside the closed loop plugin
-
RE: 1HCL Closed Loop problems and a questionposted in Duet Hardware and wiring
@dc42 Got everything updated (DWC, 1HCL, 6HC) and the firmware matches across all the boards (same as when I had 3.4). However, when I put the drive into closed loop i get:
M569 P52.0 D4 M569.6 P52.0 V1 Error: M569.6: Driver is not enabledAnd the drive does not respond, even if I leave the drive in D5, there is no response. If I take it out of closed loop I can move the drive no problem. Before I could home the drive in D5 mode.
I am not sure if I am missing something in the config. I have updated to what it says for v3.5
; Drives M669 K0 ; explicitly set Cartesian kinematics, even if I should not need to M569.1 P50.0 T2 C1000 S200 R100 I0 D0 ; Configure the 1HCL board at CAN address 50 with a quadrature encoder on the motor shaft that has 5 steps per motor full step. M569.1 P52.0 T2 C1000 S200 R100 I0 D0 ; Configure the 1HCL board at CAN address 52 with a quadrature encoder on the motor shaft that has 5 steps per motor full step. M569.1 P53.0 T2 C1000 S200 R100 I0 D0 ; Configure the 1HCL board at CAN address 53 with a quadrature encoder on the motor shaft that has 5 steps per motor full step. M569 P51.0 S1 ; Z Axis no closed loop M569 P50.0 D5 S1 ; Y2 Configure the motor on the 1HCL at can address 50 as being in closed-loop drive mode (D4) and not reversed (S1) M569 P52.0 D5 S0 ; X1 Configure the motor on the 1HCL at can address 52 as being in closed-loop drive mode (D4) and not reversed (S1) M569 P53.0 D5 S0 ; Y1 Configure the motor on the 1HCL at can address 53 as being in closed-loop drive mode (D4) and not reversed (S1) M584 X52.0 Y53.0:50.0 Z51.0; set X and Y drivers M917 X0 Y0 ; Set the closed loop axes to have a holding current of zero M350 X32 Y32 Z16 ; set steps/mm to 32 to make full use of the encoder resolution M92 X256.6532274 Y256.6532274 Z320; steps/mm for a pro series cnc M566 X900.00 Y900.00 Z60.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z180.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z20.00 ; set accelerations (mm/s^2) M906 X3000 Y3000 Z800 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout -
RE: 1HCL Closed Loop problems and a questionposted in Duet Hardware and wiring
@Phaedrux The light was dim on the board, so there was no firmware anymore. Plugged in usb and used Bossa to upload the firmware file in dc42's link.
v3.5 is telling me:
Error in start-up file macro line 84: Unknown pin name 'exp.heater3'So I am fixing it. Not sure if that is preventing the system from working because I get this now:
M569 P52.0 D4 - gives me a green box then I run M569.6 P52.0 V1 and get Error: M569.6: Driver is not enabledAs of this moment, i am looking thru the docs for the name of the laser/vfd pwm pin.
-
RE: 1HCL Closed Loop problems and a questionposted in Duet Hardware and wiring
@dc42 I downloaded the files and uploaded them via the Web panel upload. It asked if I wanted to update, and I said yes. Things went by updating, it rebooted and now nothing works. The panel duo I have connected just sits there saying Connecting and I cannot connect via the network interface.
-
RE: 1HCL Closed Loop problems and a questionposted in Duet Hardware and wiring
@dc42 I am using the 1HCL 3.4.6 firmware (I downloaded the zip file for 3.4.6 and uploaded it). When I give the gcode command to list the firmware it reports back as 3.4.6.
However, I will update and try the newer version and see if that helps.
Thanks.
-
1HCL Closed Loop problems and a questionposted in Duet Hardware and wiring
I am using 4 1HCL boards to drive Nema34 with encoder stepper motors. Everything works and moves fine when in Open Loop mode and Assisted Closed Loop mode (D5). When I change it over to closed loops (D4) and run the calibration command
M569.6 P52.0 V1I get this error:
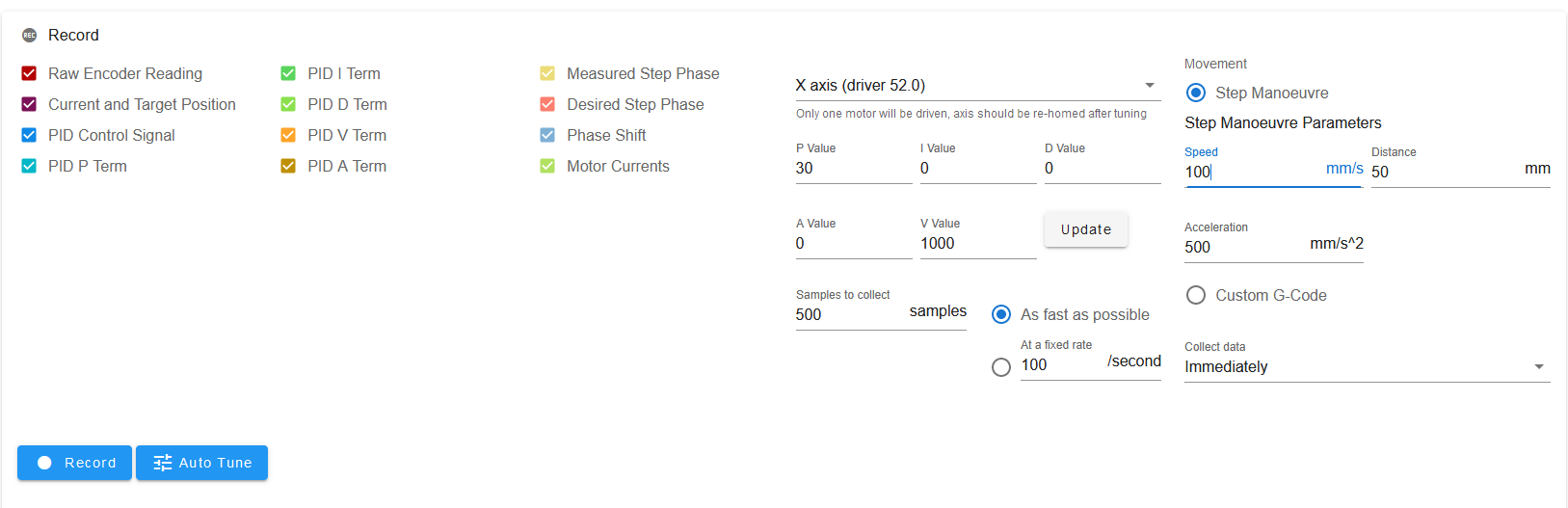
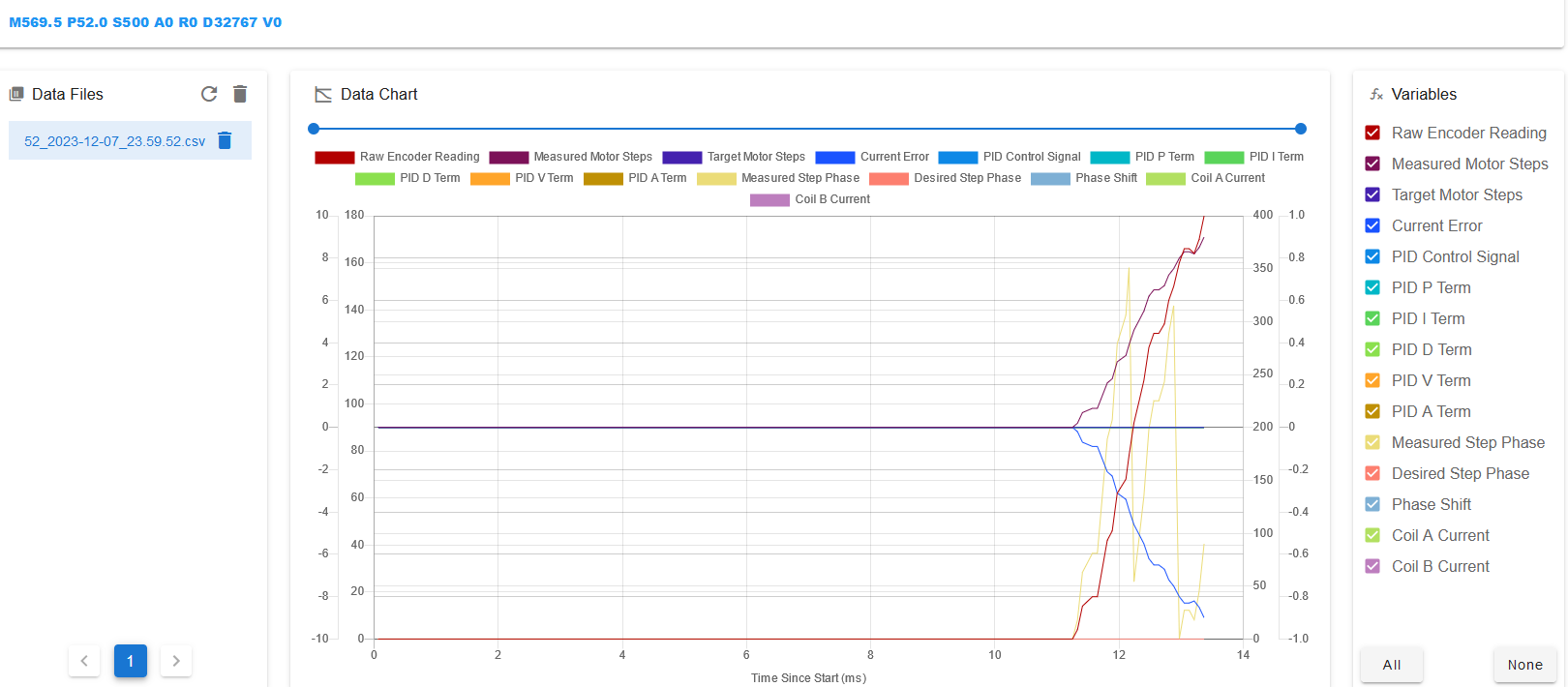
Warning: Driver 52.0 warning: tuning failed Warning: M569.6: Driver 52.0 new tuning error(s): The measured motion was inconsistent.I have installed the closed loop plugin driver, but no matter what option I do, all it gives me is a scrolling blue bar after I hit record. By chance, I managed to get some kind of output from it by moving the Axis in question. Here is a screen shot of the graph:
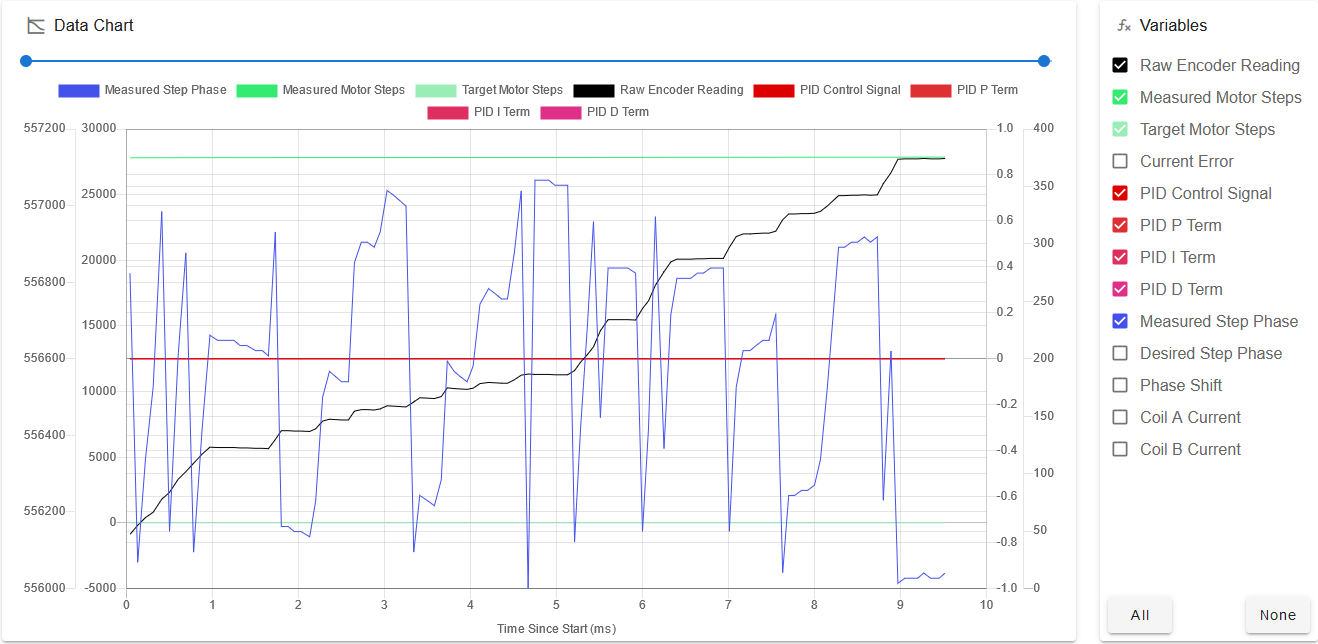
It seems like I am getting something, but I have 0 experience knowing what I should be seeing.
Here is the driver configuration, the one I am working on is P52 atm:
; Drives M669 K0 ; explicitly set Cartesian kinematics, even if I should not need to M569.1 P50.0 T2 C5 R100 I0 D0 ; Configure the 1HCL board at CAN address 50 with a quadrature encoder on the motor shaft that has 5 steps per motor full step. M569.1 P52.0 T2 C5 R100 I0 D0 ; Configure the 1HCL board at CAN address 52 with a quadrature encoder on the motor shaft that has 5 steps per motor full step. M569.1 P53.0 T2 C5 R100 I0 D0 ; Configure the 1HCL board at CAN address 53 with a quadrature encoder on the motor shaft that has 5 steps per motor full step. M569 P51.0 S1 ; Z Axis no closed loop M569 P50.0 D5 S1 ; Y2 Configure the motor on the 1HCL at can address 50 as being in closed-loop drive mode (D4) and not reversed (S1) M569 P52.0 D5 S0 ; X1 Configure the motor on the 1HCL at can address 52 as being in closed-loop drive mode (D4) and not reversed (S1) M569 P53.0 D5 S0 ; Y1 Configure the motor on the 1HCL at can address 53 as being in closed-loop drive mode (D4) and not reversed (S1) M584 X52.0 Y53.0:50.0 Z51.0; set X and Y drivers M917 X0 Y0 ; Set the closed loop axes to have a holding current of zero M350 X32 Y32 Z16 ; set steps/mm to 32 to make full use of the encoder resolution M92 X256.6532274 Y256.6532274 Z320; steps/mm for a pro series cnc M566 X900.00 Y900.00 Z60.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z180.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z20.00 ; set accelerations (mm/s^2) M906 X3000 Y3000 Z800 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeoutand the question:
The docs say:Duet firmware currently only supports tuning one driver at a time. This means that when tuning a multi-driver axis, one driver will move and the other(s) will not. If attempting to tune a multi-driver axis, please take appropriate mitigation to ensure the axis doesn't become stressed/misaligned when only one one driver moves.Does this mean it will do 1 driver and then the other and how does this apply to PID tuning?
Board: Duet 3 MB6HC (MB6HC)
Firmware: RepRapFirmware for Duet 3 MB6HC 3.4.6 (2023-07-21) (Web UI is same) -
RE: 3xY Axis Endstops only low or high works, not bothposted in Duet Hardware and wiring
@droftarts Thanks, this maybe useful.
-
RE: 3xY Axis Endstops only low or high works, not bothposted in Duet Hardware and wiring
@fcwilt Thanks for the information.
-
3xY Axis Endstops only low or high works, not bothposted in Duet Hardware and wiring
I am in the stage of setting up a 9'x12' CNC machine. I have a 5 pepperl+fuchs sensors on the machine. I am trying to setup my y-axis to have 2 high endstops (used for squaring the gantry) and 1 low endstop to determine the length of the bed (that way I can move the end stop and not have to reprogram the gcode).
When I have all the y endstops active, it will only tell me when the low endstop is triggered. If I rem out the Y1 endstop (as shown in the code below) and send M119, it will tell me the high endstops are triggered (as it should).
TLDR; Everything works independently, but if I add in the Y1 endstop, the system does not send a message when the Y2 are triggered.
Board: Duet 3 MB6HC (MB6HC)
Firmware: RepRapFirmware for Duet 3 MB6HC 3.4.6 (2023-07-21) (Web UI is same)GCode:
; Endstops M574 X1 S1 P"!io4.in" ; configure switch-type (e.g. microswitch) endstop for low end on X via pin io1.in M574 Y2 S1 P"!io5.in+!io1.in" ; configure switch-type (e.g. microswitch) endstop for low end on Y via pin io3.in ;M574 Y1 S1 P"!io2.in" ; configure switch-type (e.g. microswitch) endstop for low end on Y via pin io3.in M574 Z2 S1 P"!io3.in" ; configure switch-type (e.g. microswitch) endstop for low end on Z via pin io5.in -
Best Way to Drive Closed Loop Nema 34 Steppers Using Duet3posted in General Discussion
I am looking at driving a very large CNC table (9' x 12' / 2.75M x 3.81M) to cut hard woods and plastics. If I am correct in my research, I would use a Duet3 board and 4 1HCL expansion boards to utilize the closed loop feature.
My question is, am I missing an in between controller card? If I understand this correctly, I will be using none of the driver ports on the card, and instead be driving the machine thru the CAN Bus.
tldr> Is there just a Duet board that offers just a Can Bus to drive 1HCL cards?
-
RE: Duet Firmware 1.22 XY Inaccuracy?posted in Tuning and tweaking
I see, with my z nut, I could literally move it up and down and wiggle it quite a bit.
-
RE: Duet Firmware 1.22 XY Inaccuracy?posted in Tuning and tweaking
Thanks for the help. The problem has been found and partially fixed.

Tomorrow I will get a new M5 and nuts and see how it goes.
-
RE: Duet Firmware 1.22 XY Inaccuracy?posted in Tuning and tweaking
@Phaedrux I agree more now on the hardware. As I was reversing my threaded rod, I noticed the m5 nut that hold the carriage moves and wobbles quite a bit, unlike the m5 nuts that the gear was using to turn the rod. So, I have turned the rod upside down and swapped m5's just to see what happens. Tomorrow I will most likely hit the local metal shop and get a new m5 threaded rod and nuts and then figure out how to upgrade to a leadscrew.
-
RE: Duet Firmware 1.22 XY Inaccuracy?posted in Tuning and tweaking
@Phaedrux - I will give that a try.
@RCarlyle I was only thinking a firmware issue because the Duet I am using is an 0.8.5. As far as the Z Screw is concerned, it is an M5 .8mm thread. It sits on top of a gear that is bolted to the nema motor with a bearing for the center. When the Rod is removed, the gear has some play via the bearing center. The X Carriage itself is riding on a 12mm linear shaft with 2 bearings, and it is stabilized by a 40 x 80 extrusion where 2 10mm bearing "pinch" it. The X axis is moved by an m5 nut sitting in the X axis, so when the motor spin it pushes the X Axis up.
So I set out seeing what would happen if I mess with the threaded rod. It seems that is I push it to or away from the X axis, there is no movement. However, if I pull or push the rod parallel to the x axis it will cause a slight movement in the x axis. The rod, when it is raising or lowering the device does "wobble" (if I watch the top of the rod). I am going to flip the rod over and see if the unused side gives different results. As well as try your multi tower test.
@peirof - That would be my last resort. Going back to 1.14 would be a bit of work as I need to download and build the firmware myself, and then find the correct Duet Web Control to go with it.
-
RE: Duet Firmware 1.22 XY Inaccuracy?posted in Tuning and tweaking
Here are three different layer heights: .1, .2, and .4 all side by side. You can see the banding is within the same regions across all of them. the .4 being less noticeable:

@RCarlyle I already did the auto tune on the bed in a previous response. And for good measure, it is not the bed, here is a print I did with the bed off:

-
RE: Duet Firmware 1.22 XY Inaccuracy?posted in Tuning and tweaking
All that was done besides lengthening the X and Y axis is change the belts from MXL to GT2 (and the gear and bearing as well).
The layers appear to wobble, not so much thicker and thinner. The picture I put up is of the seam sides so you can see how the beginning does not match the end. And it is multi axis, not just the X or the Y. My calibration parts printed almost perfectly squared. Aside from the XZ axis deviating .25mm over 80mm, everything else is square.
There is no wobble in anything that was not there from the original build. For instance the X axis on the printer is an arm that sticks out over the bed with no support on the other end. If I grab the X carriage there is no play in the back and forth. If I grab the bed there is no play either.
It only really wiggles at speeds over 15mm/s. But when I print, I print the inside at 70mm/s with 3 perimeters. The outer perimeter being printed at 10mm/s, and the prints come out looking very nice.
That being said, the printed tests are coming out at 10 mm/s. And the effect in the pictures is less on a .4mm print then on a .2mm. I am at this moment printing a .1mm layer height now just to compare all 3 (photo coming when done).
It is the weird banding that gets worse as the layer height shortens that makes me think there is a firmware error since it has such a repeatable pattern regardless of the shape of the object. That, and this did not happen with the old firmware.
-
RE: Duet Firmware 1.22 XY Inaccuracy?posted in Tuning and tweaking
What would running a PID on the heatbed do for the printing that is going on?
Regardless, I did the autotune on the heated bed as well:
0_1536006271365_config-override.gAnd that did not change how the layers do not stack on eachother precisely. I also used a 2nd silcing software to make a new model and test it as well. It also does the same thing.
-
Duet Firmware 1.22 XY Inaccuracy?posted in Tuning and tweaking
I posted a problem I had about a week ago that I thought was related to PID of the hot end. After a brief discussion and correcting my config files, recalibrating everything I could, I rand some test prints and I am getting the same printing issues.
History: About 2 years ago I hand built an Omerod 2 based off of plans from Reprappro's website (just around the time they closed shop). Since then I was using firmware 1.14 and everything was printing very very good.
I decided it was now time to try and get a better print out of the printer and extend some of the axis. So I disassembled and reassembled the printer using long arms and some GT2 belts (2mm pitch) with some 16 tooth gears. Which I just went and used prusa's calculator to get the proper steps.
After which I printed somethings out with my printer. Everything still working well and properly layering, etc. I then decided it was a good time to upgrade my firmware from 1.14 to 1.22. After which I started getting layering problems. In the attached picture you can see what is going on. The prints are at .2mm layer heights, the left cylinder is using a PID, the right one is BangBang. As you can see (zoom in if you can) the layers slowly oscillate in a visibly repeated pattern.

To emphasize the problem only began after going from 1.14 to 1.22. Here is the rest of the information:
Firmware Name: RepRapFirmware for Duet
Firmware Electronics: Duet 0.85
Firmware Version: 1.22 (2018-07-26b2)
Web Interface Version: 1.21.2-dc42