Hello everyone!
I am using the 1HCL expansion board in order to control the step motors with encoders. I would like to use them also for cooling motors using funs. I saw the temp_0 pin in documentation for thermistor pt1000 and some output pins. But I can’t find any examples of this configuration. Can anyone help me make this configuration for cooling motors in a closed loop?
Posts made by Kiryl
-
Configure close loop system with thermistor and fun in 1HCLposted in Duet Hardware and wiring
-
RE: Problem with calibration of encodersposted in Duet Hardware and wiring
@jay_s_uk Does that mean I have to write to them or just wait for them to respond?
-
RE: Problem with calibration of encodersposted in Duet Hardware and wiring
@jay_s_uk Hello, I was able to update the system to version 3.4.4, here are the results of the M122 command:
M122 B61
Diagnostics for board 61:
Duet EXP1HCL firmware version 3.4.4 (2022-10-14 11:45:14)
Bootloader ID: SAME5x bootloader version 2.4 (2021-12-10)
All averaging filters OK
Never used RAM 52256, free system stack 163 words
Tasks: Move(notifyWait,0.0%,108) HEAT(notifyWait,0.0%,88) CanAsync(notifyWait,0.0%,66) CanRecv(notifyWait,0.0%,79) CanClock(notifyWait,0.0%,70) TMC(notifyWait,36.1%,360) CLSend(notifyWait,0.0%,152) MAIN(running,61.9%,409) IDLE(ready,0.0%,30) AIN(notifyWait,2.0%,265), total 100.0%
Last reset 00:06:04 ago, cause: software
Last software reset data not available
Closed loop enabled: yes, pre-error threshold: 0.00, error threshold: 0.00, encoder type rotaryQuadrature, reverse polarity: no, position -25137, raw count = 40539, tuning mode: 0, tuning error: 0x4, collecting data: no
Control loop runtime (ms): min=0.003, max=0.029, frequency (Hz): min=10000, max=17442
Driver 0: pos 1171200, 1600.0 steps/mm,tuning failed, SG min 0, mspos 828, reads 14455, writes 3168 timeouts 0, steps req 1804800 done 881639
Moves scheduled 15, completed 15, in progress 0, hiccups 0, step errors 0, maxPrep 62, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0
Peak sync jitter -5/8, peak Rx sync delay 194, resyncs 0/0, no step interrupt scheduled
VIN voltage: min 24.0, current 24.1, max 24.3
V12 voltage: min 12.2, current 12.2, max 12.2
MCU temperature: min 29.6C, current 36.1C, max 36.1C
Last sensors broadcast 0x00000000 found 0 52 ticks ago, 0 ordering errs, loop time 0
CAN messages queued 3002, send timeouts 0, received 1896, lost 0, free buffers 37, min 37, error reg 0
dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 302, adv 37072/37189But the problem is still the same, the encoder is not calibrated on the axis where the driver is at address 61. When Ireplace it with any other driver, it calibrates without any problems.
-
RE: Problem with calibration of encodersposted in Duet Hardware and wiring
@jay_s_uk I never used sudo apt update, M997 worked fine.
And here is a reprieve from M122M122
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.4.4 (2022-10-20 16:19:01) running on Duet 3 MB6HC v1.01 (SBC mode)
Board ID: 0JD2M-999AL-D2PS0-6JTDA-3SD6J-1NJ30
Used output buffers: 1 of 40 (12 max)
=== RTOS ===
Static ram: 152824
Dynamic ram: 66272 of which 76 recycled
Never used RAM 131428, free system stack 154 words
Tasks: SBC(ready,0.6%,466) HEAT(notifyWait,0.0%,374) Move(notifyWait,0.0%,256) CanReceiv(notifyWait,0.0%,773) CanSender(notifyWait,0.0%,335) CanClock(delaying,0.0%,340) TMC(notifyWait,7.8%,91) MAIN(running,90.8%,1257) IDLE(ready,0.8%,30), total 100.0%
Owned mutexes: HTTP(MAIN)
=== Platform ===
Last reset 00:01:08 ago, cause: power up
Last software reset at 2022-09-18 06:19, reason: User, GCodes spinning, available RAM 131212, slot 0
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task SBC Freestk 0 n/a
Error status: 0x00
Step timer max interval 132
MCU temperature: min 22.7, current 31.8, max 31.9
Supply voltage: min 23.7, current 23.9, max 24.1, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 12.2, current 12.2, max 12.2, under voltage events: 0
Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0
Events: 1 queued, 1 completed
Driver 0: standstill, SG min 0, mspos 8, reads 54074, writes 11 timeouts 0
Driver 1: standstill, SG min 0, mspos 8, reads 54075, writes 11 timeouts 0
Driver 2: standstill, SG min 0, mspos 8, reads 54075, writes 11 timeouts 0
Driver 3: standstill, SG min 0, mspos 8, reads 54075, writes 11 timeouts 0
Driver 4: standstill, SG min 0, mspos 8, reads 54075, writes 11 timeouts 0
Driver 5: standstill, SG min 0, mspos 8, reads 54075, writes 11 timeouts 0
Date/time: 2022-09-18 06:17:58
Slowest loop: 34.06ms; fastest: 0.03ms
=== Storage ===
Free file entries: 10
SD card 0 not detected, interface speed: 37.5MBytes/sec
SD card longest read time 0.0ms, write time 0.0ms, max retries 0
=== Move ===
DMs created 125, segments created 3, maxWait 34885ms, bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves 15, completed 15, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== AuxDDARing ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP* is doing "M122" in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger* is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty
=== CAN ===
Messages queued 434, received 2273, lost 0, boc 0
Longest wait 7ms for reply type 6018, peak Tx sync delay 7, free buffers 50 (min 48), ts 343/342/0
Tx timeouts 0,0,0,0,0,0
=== SBC interface ===
Transfer state: 5, failed transfers: 0, checksum errors: 0
RX/TX seq numbers: 2615/2615
SPI underruns 0, overruns 0
State: 5, disconnects: 0, timeouts: 0 total, 0 by SBC, IAP RAM available 0x2ad08
Buffer RX/TX: 0/0-0, open files: 0
=== Duet Control Server ===
Duet Control Server v3.4.1
Code buffer space: 4096
Configured SPI speed: 8000000Hz, TfrRdy pin glitches: 0
Full transfers per second: 50.79, max time between full transfers: 41.8ms, max pin wait times: 45.0ms/15.8ms
Codes per second: 1.46
Maximum length of RX/TX data transfers: 3044/1008 -
RE: Problem with calibration of encodersposted in Duet Hardware and wiring
@jay_s_uk I used M997 B61 command, and 1HCL updated only to 3.4.1 version. is there are any other ways to update to 3.4.4?
-
RE: Problem with calibration of encodersposted in Duet Hardware and wiring
@dc42 I used M997 B61 command, and now the output is:
M122 B61
Diagnostics for board 61:
Duet EXP1HCL firmware version 3.4.1 (2022-06-01 21:14:32)
Bootloader ID: SAME5x bootloader version 2.4 (2021-12-10)
All averaging filters OK
Never used RAM 52256, free system stack 169 words
Tasks: Move(notifyWait,0.0%,108) HEAT(notifyWait,0.0%,88) CanAsync(notifyWait,0.0%,66) CanRecv(notifyWait,0.0%,79) CanClock(notifyWait,0.0%,72) TMC(notifyWait,35.1%,360) CLSend(notifyWait,0.0%,152) MAIN(running,62.8%,399) IDLE(ready,0.0%,30) AIN(notifyWait,2.0%,265), total 100.0%
Last reset 00:00:34 ago, cause: software
Last software reset data not available
Closed loop enabled: yes, pre-error threshold: 0.00, error threshold: 0.00, encoder type rotaryQuadrature, reverse polarity: no, position 21, raw count = 65532, tuning mode: 0, tuning error: 0x4, collecting data: no
Control loop runtime (ms): min=0.004, max=0.017, frequency (Hz): min=10870, max=17045
Driver 0: pos -328000, 1600.0 steps/mm,tuning failed, SG min 0, mspos 76, reads 25212, writes 1072 timeouts 0, steps req 424000 done 136004
Moves scheduled 5, completed 5, in progress 0, hiccups 0, step errors 0, maxPrep 64, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0
Peak sync jitter -5/5, peak Rx sync delay 192, resyncs 0/0, no step interrupt scheduled
VIN voltage: min 23.9, current 24.1, max 24.3
V12 voltage: min 12.2, current 12.2, max 12.2
MCU temperature: min 33.1C, current 33.8C, max 33.8C
Last sensors broadcast 0x00000000 found 0 212 ticks ago, 0 ordering errs, loop time 0
CAN messages queued 326, send timeouts 0, received 207, lost 0, free buffers 37, min 37, error reg 0
dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 295, adv 37076/37196It looks like the firmware is only updated to version 3.4.1.
End encoders still do not work
-
RE: Problem with calibration of encodersposted in Duet Hardware and wiring
@dc42 Can you please explain to me how to update the firmware if I am using the 6HC main board in SBC mode? I understand that it should be easy, but I can't find a good explanation on the internet.
-
RE: Problem with calibration of encodersposted in Duet Hardware and wiring
@dc42 The version of my main boadre firmavire is 3.4.4.
And the 1HCL version is 3.4.1. But I don't think that's the problem. Because the other 1HCLs have the same version and work fine. -
RE: Problem with calibration of encodersposted in Duet Hardware and wiring
@jay_s_uk Sorry for the long reply.
There is an output of the M122 B61 command, and I also attach the datasheet for my encoder with motors.Karta katalogowa CS-M22331-L.pdf
M122 B61
Diagnostics for board 61:
Duet EXP1HCL firmware version 3.4.0beta7+8 (2022-01-25 10:33:00)
Bootloader ID: SAME5x bootloader version 2.4 (2021-12-10)
All averaging filters OK
Never used RAM 52272, free system stack 2600 words
Tasks: Move(notifyWait,0.0%,152) HEAT(notifyWait,0.0%,88) CanAsync(notifyWait,0.0%,69) CanRecv(notifyWait,0.0%,80) CanClock(notifyWait,0.0%,71) TMC(notifyWait,34.3%,360) CLSend(notifyWait,0.0%,152) MAIN(running,63.9%,408) IDLE(ready,0.0%,29) AIN(notifyWait,1.8%,265), total 100.0%
Last reset 00:04:03 ago, cause: power up
Last software reset data not available
Closed loop enabled: yes, pre-error threshold: 0.00, error threshold: 0.00, encoder type rotaryQuadrature, reverse polarity: no, position 2, raw count = 0, tuning mode: 0, tuning error: 0x1, collecting data: no
Control loop runtime (ms): min=0.003, max=0.028, frequency (Hz): min=11538, max=17857
Driver 0: pos 0, 1600.0 steps/mm,standstill, SG min 0, mspos 4, reads 54056, writes 23 timeouts 0, steps req 0 done 0
Moves scheduled 0, completed 0, in progress 0, hiccups 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0
Peak sync jitter -5/8, peak Rx sync delay 192, resyncs 0/0, no step interrupt scheduled
VIN voltage: min 24.2, current 24.3, max 24.4
V12 voltage: min 18.1, current 18.1, max 18.2
MCU temperature: min 23.7C, current 28.3C, max 28.3C
Last sensors broadcast 0x00000000 found 0 27 ticks ago, 0 ordering errs, loop time 0
CAN messages queued 1978, send timeouts 0, received 1231, lost 0, free buffers 37, min 37, error reg 0
dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0 -
Problem with calibration of encodersposted in Duet Hardware and wiring
Hello everyone,
We are having problems with the encoder calibration on the stepper motor. We are using 1HCL expansion boards and with two of them the encoders can not calibrate, when we change to any other 1HCL the encoders calibrate fine.

Under the yellow error, information about the successful calibration of the encoder, and above some message that the encoder does not calibrate correctly. Is there anyone who can help? And if our problem is not solved, can we ask for a refund under warranty? -
RE: problems with setting current for step motorposted in General Discussion
@jay_s_uk oh yes, sorry.
M122 B51 - "Diagnostics for board 51:
Duet EXP1HCL firmware version 3.4.0beta7+8 (2022-01-25 10:33:00)
Bootloader ID: SAME5x bootloader version 2.4 (2021-12-10)
All averaging filters OK
Never used RAM 52296, free system stack 2592 words
Tasks: Move(notifyWait,0.0%,160) HEAT(notifyWait,0.0%,95) CanAsync(notifyWait,0.0%,69) CanRecv(notifyWait,0.0%,82) CanClock(notifyWait,0.0%,71) TMC(notifyWait,31.4%,360) CLSend(notifyWait,0.0%,152) MAIN(running,66.8%,400) IDLE(ready,0.0%,39) AIN(notifyWait,1.8%,265), total 100.0%
Last reset 00:22:34 ago, cause: software
Last software reset data not available
Closed loop enabled: no, pre-error threshold: 0.00, error threshold: 0.00, encoder type none
Driver 0: pos 0, 40.0 steps/mm,standstill, SG min 0, mspos 696, reads 15671, writes 19 timeouts 0, steps req 0 done 0
Moves scheduled 0, completed 0, in progress 0, hiccups 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0
Peak sync jitter -5/8, peak Rx sync delay 183, resyncs 0/0, no step interrupt scheduled
VIN voltage: min 24.1, current 24.2, max 24.2
V12 voltage: min 18.0, current 18.0, max 18.0
MCU temperature: min 31.2C, current 31.2C, max 38.1C
Last sensors broadcast 0x00000000 found 0 124 ticks ago, 0 ordering errs, loop time 0
CAN messages queued 10869, send timeouts 0, received 6690, lost 0, free buffers 37, min 37, error reg 0
dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0"M122 - "=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.4.1 (2022-06-01 21:09:01) running on Duet 3 MB6HC v1.01 or later (SBC mode)
Board ID: 0JD2M-999AL-D2PS0-6JTDA-3SD6J-1NJ30
Used output buffers: 1 of 40 (12 max)
=== RTOS ===
Static ram: 151000
Dynamic ram: 64632 of which 0 recycled
Never used RAM 135040, free system stack 200 words
Tasks: SBC(resourceWait:,0.5%,482) HEAT(notifyWait,0.0%,371) Move(notifyWait,0.0%,352) CanReceiv(notifyWait,0.0%,772) CanSender(notifyWait,0.0%,374) CanClock(delaying,0.0%,339) TMC(notifyWait,7.5%,92) MAIN(running,91.9%,1254) IDLE(ready,0.0%,30), total 100.0%
Owned mutexes: HTTP(MAIN)
=== Platform ===
Last reset 00:23:07 ago, cause: software
Last software reset at 2022-09-17 06:26, reason: User, GCodes spinning, available RAM 134696, slot 0
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0044a000 BFAR 0x00000000 SP 0x00000000 Task SBC Freestk 0 n/a
Error status: 0x00
Step timer max interval 136
MCU temperature: min 37.5, current 39.2, max 39.4
Supply voltage: min 23.9, current 23.9, max 24.0, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 12.2, current 12.2, max 12.2, under voltage events: 0
Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0
Events: 0 queued, 0 completed
Driver 0: standstill, SG min 0, mspos 8, reads 53352, writes 11 timeouts 0
Driver 1: standstill, SG min 0, mspos 8, reads 53352, writes 11 timeouts 0
Driver 2: standstill, SG min 0, mspos 8, reads 53352, writes 11 timeouts 0
Driver 3: standstill, SG min 0, mspos 8, reads 53352, writes 11 timeouts 0
Driver 4: standstill, SG min 0, mspos 8, reads 53352, writes 11 timeouts 0
Driver 5: standstill, SG min 0, mspos 8, reads 53353, writes 11 timeouts 0
Date/time: 2022-09-17 06:49:26
Slowest loop: 21.28ms; fastest: 0.03ms
=== Storage ===
Free file entries: 10
SD card 0 not detected, interface speed: 37.5MBytes/sec
SD card longest read time 0.0ms, write time 0.0ms, max retries 0
=== Move ===
DMs created 125, segments created 0, maxWait 0ms, bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== AuxDDARing ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP* is doing "M122" in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger* is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty
=== CAN ===
Messages queued 6980, received 44466, lost 0, boc 0
Longest wait 3ms for reply type 6024, peak Tx sync delay 382, free buffers 50 (min 49), ts 6940/6939/0
Tx timeouts 0,0,0,0,0,0
=== SBC interface ===
Transfer state: 5, failed transfers: 0, checksum errors: 0
RX/TX seq numbers: 55494/55494
SPI underruns 0, overruns 0
State: 5, disconnects: 0, timeouts: 0 total, 0 by SBC, IAP RAM available 0x2b880
Buffer RX/TX: 0/0-0, open files: 0
=== Duet Control Server ===
Duet Control Server v3.4.1
Code buffer space: 4096
Configured SPI speed: 8000000Hz, TfrRdy pin glitches: 1
Full transfers per second: 40.03, max time between full transfers: 57.9ms, max pin wait times: 55.8ms/14.7ms
Codes per second: 0.02
Maximum length of RX/TX data transfers: 3084/728" -
RE: problems with setting current for step motorposted in General Discussion
@Phaedrux this is what I get after sending M115 B51
"Duet EXP1HCL firmware version 3.4.0beta7+8 (2022-01-25 10:33:00)"
The M112 command is an emergency stop. -
RE: problems with setting current for step motorposted in General Discussion
@jens55 Thank you for your help. We will fight it further
-
RE: problems with setting current for step motorposted in General Discussion
@dc42 Before that we measured the current consumption of the driver itself as DC, after your advice we measured the current of one phase of the motor in AC mode, and it turned out that there are about 4 amps. This means that the driver works properly and delivers the right current.
However we would like to increase duration time of ON state. We checked this with an oscilloscope and it turned out that the phase voltage is always the same and it does not increase even if the motor runs out of phase.

Is there any solution to this problem? -
RE: problems with setting current for step motorposted in General Discussion
@jens55 Our step driver can provide up to 6.3A, but why we can't change the output current?
-
RE: problems with setting current for step motorposted in General Discussion
@jay_s_uk we are using MB6HC and motor drivers 1HCL, firmfire version is 3.3, and motor is CS-M22323B
-
problems with setting current for step motorposted in General Discussion
Hello
We are facing a problem with settings the motor current.
When the motor shaft is going to lift the lead, it starts messing steps and going down with a snap, then we measured the current and concluded that it was not enoughThe max value for our type of motor is 5 amps, so we set the current by M906 Z5000.
and when we started to measure current by multimeter, we saw something about 1 amp.
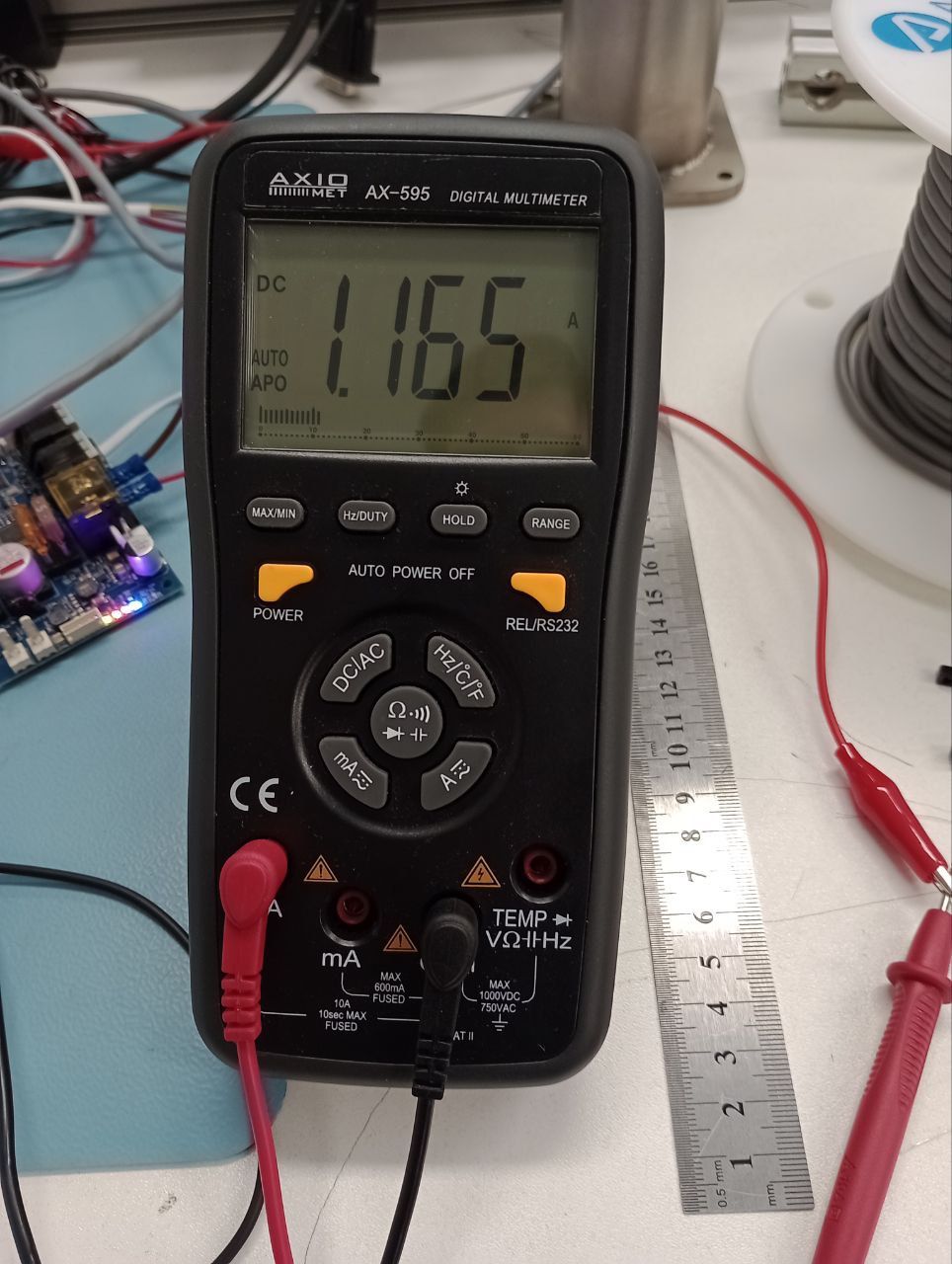
Can you help out with our problem?Best regards
-
RE: Warranty returnposted in Purchasing
@t3p3tony I apologize for the long absence. I checked the USB cable, it works well and transmits data without problems. After connecting to the computer I can not see my DUET 3 in the device manager and BOSSA also does not see it.