Apologies all, This is the Markforged Kinematics. Next time ill look before i post!
Best posts made by gwatson90
-
RE: Does Duet support this kind of Kinematics?posted in General Discussion
Latest posts made by gwatson90
-
RE: First time Core XY Build using Duet Hardwareposted in General Discussion
@droftarts That is why I'm really looking into Core-XY. I can at least get the XY motors out of the build chamber. The heat-break and extruder motor will be water cooled.
I think the toolboards are great, but I have never used them because all of my other machines are enclosed. I usually just run one or two multi-conductor cables (Either Igus or Molex) to my tool head to keep the clutter down. Currently my highest temp machine is 90C chamber. However the kinematics are Cartesian so the motors are inside the chamber. I haven't had any issues yet and honestly the motors aren't that expensive and I'm willing to write them of as Somewhat-consumable.
However at over 120C it becomes a reliability issue so that's why I want em out! As well as the fans. Thankfully most E-Motors are so short that a well made water cooling block can do well enough to keep the heat down.
This has been and excellent replacement for a BL-Touch in a heated chamber too:
https://mandalaroseworks.com/products/strykepoint-probe -
RE: First time Core XY Build using Duet Hardwareposted in General Discussion
@mrehorstdmd Thank you for the input and for your excellent write up on Core-XY layouts. I've been looking through it over and over again. It really made me consider the trade off between using toothed idlers vs bearings.
I generally agree with you about standing idlers and pulleys on posts or shoulder bolts. However it may become necessary due to form factor constraints (admittedly self-imposed and arbitrary) and machining less parts. My plan there was to counter bore the holes (with either a boring bar or reamer to keep the tolerance tight) for the shoulder bolts. This would minimize moment loads and add rigidity. If reality strikes then I'll go back to the drawing board.
-
RE: Does Duet support this kind of Kinematics?posted in General Discussion
@dwuk Is the build you currently have in your profile pic?
-
RE: Does Duet support this kind of Kinematics?posted in General Discussion
@dwuk I also have a minor concern about driving the Y Axis from one side. However I don't think that this motion system is subjected to the same kind of "Racking" forces as an H-Bot. Depending on your build volume you can probably get away with adding just making your XY motion system sufficiently rigid and appropriately dimensioned for the task as MarkForged seems to have done here.
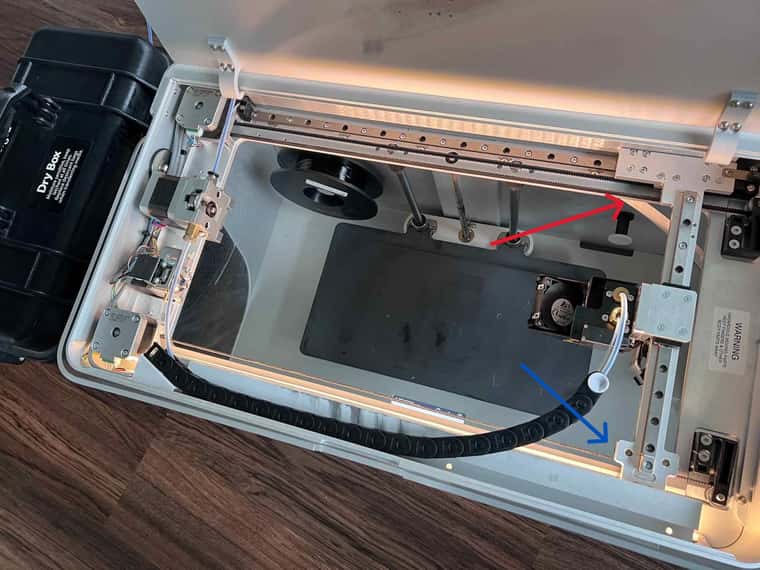
Notice on the Y drive side (Red Arrow) they are running two guides. A single guide would behave like an axis of rotation when subjected to moment loads while using two guides leads to more lateral loading of each guide which they are much more capable of handling while minimizing deflection. This is a small detail that makes a big difference.
The other side (Blue arrow) only has one guide. You could have a belt driven rotary shaft drive both Y axis belts eliminating the need for the third motor.
If you decided to follow the route that MKFG did here be mindful that adding a second guide to your rail could cause binding or non-smooth motion if your mounting surfaces to the rail mount or X-Axis member are not sufficiently flat.
My next build will be 350x350 so for the sake of overkill I'm just going to use two guides on each Y rail and drive both ends of the X- Axis member.
-
RE: Does Duet support this kind of Kinematics?posted in General Discussion
Apologies all, This is the Markforged Kinematics. Next time ill look before i post!
-
Does Duet support this kind of Kinematics?posted in General Discussion
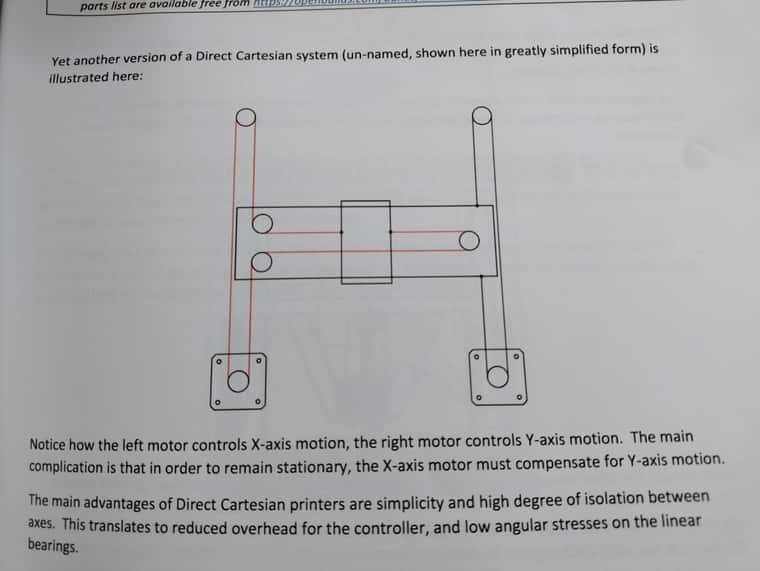
This looks like an interesting take on a Cartesian motion system. Does duet support this?
Is it just a matter of editing the "Advanced core kinematics settings" in RRF Config tool?
-
First time Core XY Build using Duet Hardwareposted in General Discussion
Hello all, I'm looking for input on a new Core XY build (350x350x350). I have a lot of experience with other printer builds, but this is my first step into the Core XY kinematics. This will be a non stop, High temp printer (Up to 135C) chamber temps. Core XY would make it much simpler to put the motors for XY motion outside of the chamber enabling me to use either servos or closed loop steppers and water cooling the E stepper and Cold end.
My main concern at the moment is the extra little belt tension added after heat soak (Causing thermal expansion) pulling the XY axis out of square.
Is this warranted and does anybody have any experiences or input to share? Also other things a CoreXY beginner should be mindful of? I own CNC machine tools for my business so this will not be an extrusion based build.
Thank you!
-
RE: Suggestions for wiring to be used inside heated enclosure.posted in General Discussion
@rjenkinsgb Thank you for helping me lay some ground work for all this! I'll keep an eye out for resources.
-
RE: Suggestions for wiring to be used inside heated enclosure.posted in General Discussion
@rjenkinsgb Well, feeding a meter or so of cable through Electrical conduit would certainly be easier than using regular cable loom like I have in the past and it has a slightly better bend radius that the ChainFlex. So, if I'm understanding you correctly; Motor cables, signal cables, and heater cables all need to be channeled through their own conduit to obtain maximum avoidance of interference. Do the fans need to as well? Does the conduit then need to be grounded to a drain? Sorry for so many questions, but EMI suppression is a new avenue for me and I'm quite fixated on it at the moment. Are you aware of any good resources I can look to for more information? Thank you!
Also, I just ran across this: https://hollandshielding.com/Flexible-cable-shield
Is this a viable option as well?
-
RE: Suggestions for wiring to be used inside heated enclosure.posted in General Discussion
@rjenkinsgb Thank you for the response, this will help my narrow down my search criteria for sure. I was primarily interested in the ChainFlex due to its shielding. However should I only be concerned with shielding cables that transmit data like thermistor and probe cables and just settle for twisting pairs for the steppers? I should have also mentioned that EMI management is also a priority for me as well.